1.本技术涉及机械臂的技术领域,尤其是涉及一种流水线用反吊抓取机械臂。
背景技术:
2.随着自动化技术的不断发展,机器人的应用越来越广泛,从太空飞船的空间作业机器人到日常生活中的扫地机器人,机器人真正的走进了各行各业,每家每户。真正作为“生产力”而存在的机器人是工业生产中使用的机器人,工业上使用的机器人可以在高温,辐射,有毒等恶劣环境下长时间稳定状态工作或是在流水线上从事极度枯燥的机械性重复工作,极大地解放了人工劳动力,使得珍贵的人工资源可以更多的在较为舒适的环境中从事于创造和设计性质的工作。工业上使用的机器人功能强大,带负载能力很强,有很多还拥有人机协作的能力辅助人类工作。
3.真正应用在工业上的机器人一般都是机械臂形式的机器人。机械臂因体积问题,常常是固定安装在一些某一处位置,机器人在占用面积比较大,这就使本来就局促的位置拥挤不堪,为了提高机械臂的运动空间包络范围,就需要采用一种旋转结构吊装机械臂,同时旋转结构需满足高刚性和高负载的要求。
4.针对上述中的相关技术,发明人机械臂的运动空间,包络的范围受限,使机械臂的使用受到了局限性。
技术实现要素:
5.为了改善机械臂的运动空间和包络的范围受限的问题,本技术提供一种流水线用反吊抓取机械臂。
6.本技术提供一种流水线用反吊抓取机械臂,采用如下的技术方案:
7.一种流水线用反吊抓取机械臂,包括吊板,所述吊板的底部固定连接有转动盘,所述转动盘的内部设置有第一电机,第一电机的输出轴固定连接有齿轮轴,转动盘的下方开口处设置有圆盘,圆盘的顶部固定连接有蜗轮,蜗轮与齿轮轴相互啮合,所述圆盘的顶部通过吊杆连接有吊环,所述圆盘的底部螺栓连接有支板,所述支板的内部通过第二电机转动连接有第一活动臂,所述第二电机的一侧出口端设置有转杆,所述转杆设置有若干,所述第一活动臂的底部两侧通过第三电机转动连接有第二活动臂,所述第二活动臂的底部通过第四电机转动连接有第三活动臂,所述第三活动臂的底部出口端固定连接有第五电机,所述第五电机的底部出口端通过传动轴转动连接有只爪。
8.通过采用上述技术方案,转动盘为圆形,涡轮与齿轮轴相互啮合,齿轮轴的底部固定连接有圆盘,圆盘位于转动盘的轴心处,圆盘的顶部通过吊杆连接有吊环,吊环的轴心距与吊杆之间相互契合,吊环为圆形,支板为碳钢材质,支板的内部通过第二电机转动连接有第一活动臂,第一活动臂内部设置有方孔,方孔与第二电机外径相契合,第二活动臂的底部通过第四电机转动连接有第三活动臂,第三活动臂的宽度小于第二活动臂,这样的设计通过吊板把机械臂吊于流水线的顶部,增加了机械臂的运动空间和包络的范围,减少机械臂
使用中受到的局限性,增加了机械臂的实用性。
9.可选的,所述吊杆的顶部出口端固定连接有滚轮,所述滚轮的两侧设置有滚槽,所述吊环通过顶部固定板螺栓连接有吊板,所述吊环的内部设置有轨道,所述轨道与滚槽之间相互匹配。
10.通过采用上述技术方案,吊杆的顶部出口端固定连接有基座,基座通过内部轴承柱转动连接有滚轮,固定板的外径与转动盘相互匹配,吊环的内部设置有轨道,轨道与滚槽之间相互匹配,避免滚轮在工作中出现偏移,影响工作效率,这样的设计可以保证动盘在转动过程的平稳性,防止动盘在转动过程中发生倾斜。
11.可选的,所述支板内壁设置有螺纹孔,所述转杆通过螺纹孔固定连接有支板。
12.通过采用上述技术方案,这样的设计使转杆固定支板,避免转杆的脱落,从而会导致的第二电机出现空转现象空转,增加了机械臂的安全性。
13.可选的,所述第二活动臂的内部设置有支撑柱,所述支撑柱靠近第三活动臂的一侧焊接有夹板。
14.通过采用上述技术方案,支撑柱的厚度大于夹板,夹板的厚度小于第三活动臂中间间距,这样的设计增加了第三活动臂的横向结构强度,减少第三活动臂在工作中发生形变的可能,保障了机械臂的安全性。
15.可选的,所述第三活动臂的底部设置有插板,所述插板与第五电机之间相互匹配。
16.通过采用上述技术方案,插板的内径与第五电机之间相互契合,这样的设计增加第五电机的稳固性,避免只爪抓取物件压力过大导致的第五电机本体反转,增加了机械臂使用的安全性。
17.可选的,所述只爪的顶部设置有第六电机,所述第六电机通过底部联轴器齿轮啮合有半月爪,所述第三活动臂的一侧设置有传感器,所述传感器与第六电机之间电性连接。
18.通过采用上述技术方案,半月爪的顶部出口端焊接有齿轮,半月爪与联轴器之间相互啮合,传感器与第六电机之间电性连接,传感器的设计可以检测半月爪之间的压力,避免半月爪之间压力过大导致的产品破损,影响产品质量。
19.综上所述,本技术包括以下至少一种有益效果:
20.1.吊杆的顶部出口端固定连接有滚轮,吊杆的顶部出口端固定连接有基座,基座通过内部轴承柱转动连接有滚轮,滚轮的两侧设置有滚槽,吊环通过顶部固定板螺栓连接有吊板,固定板的外径与转动盘相互匹配,吊环的内部设置有轨道,轨道与滚槽之间相互匹配,避免滚轮在工作中出现偏移,影响工作效率,这样的设计可以保证动盘在转动过程的平稳性,防止动盘在转动过程中发生倾斜,这样的设计通过吊板把机械臂吊于流水线的顶部,增加了机械臂的运动空间和包络的范围,减少机械臂使用中受到的局限性,增加了机械臂的实用性。
21.2.只爪的顶部设置有第六电机,第六电机通过底部联轴器齿轮啮合有半月爪,半月爪的顶部出口端焊接有齿轮,半月爪与联轴器之间相互啮合,第三活动臂的一侧设置有传感器,传感器与第六电机之间电性连接,传感器的设计可以检测半月爪之间的压力,避免半月爪之间压力过大导致的产品破损,影响产品质量。
附图说明
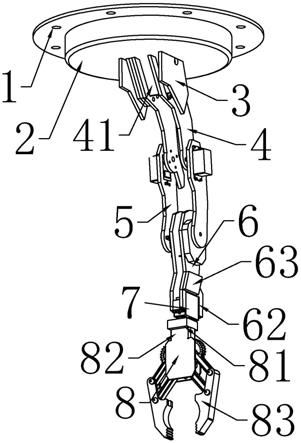
22.图1是本实施例的整体结构示意图;
23.图2是本实施例的转动盘结构示意图;
24.图3是本实施例的第二活动臂结构示意图;
25.图4是本实施例的图2处的a处结构示意图。
26.附图标记说明:1、吊板;2、转动盘;21、圆盘;22、第一电机;23、蜗轮;24、齿轮轴;25、吊杆;26、滚轮;261、滚槽;27、吊环;271、轨道;272、固定板;3、支板;4、第一活动臂;41、第二电机;42、转杆;5、第二活动臂;51、第三电机;52、支撑柱;521、夹板;6、第三活动臂;61、第四电机;62、插板;63、传感器;7、第五电机;8、只爪;81、第六电机;82、联轴器;83、半月爪。
具体实施方式
27.以下结合附图1-4对本技术作进一步详细说明。
28.实施例:
29.本技术实施例公开一种流水线用反吊抓取机械臂。参照图1和图2,包括吊板1,吊板1为碳钢材质,吊板1的底部固定连接有转动盘2,转动盘2为圆形,转动盘2的内部设置有第一电机22,第一电机22的输出轴固定连接有齿轮轴24,转动盘2的下方开口处设置有圆盘21,圆盘21的顶部固定连接有蜗轮23,蜗轮23与齿轮轴24相互啮合,圆盘21位于转动盘2的轴心处,圆盘21的顶部通过吊杆25连接有吊环27,吊环27的轴心距与吊杆25之间相互契合,吊环27为圆形,圆盘21的底部螺栓连接有支板3,支板3为碳钢材质,支板3的内部通过第二电机41转动连接有第一活动臂4,第一活动臂4内部设置有方孔,方孔与第二电机41外径相契合,第一活动臂4的底部两侧通过第三电机51转动连接有第二活动臂5,第二活动臂5的两侧插接有相对立的一对第三电机51,第二活动臂5的底部通过第四电机61转动连接有第三活动臂6,第三活动臂6的宽度小于第二活动臂5,第三活动臂6的底部出口端固定连接有第五电机7,第五电机7的底部出口端通过传动轴转动连接有只爪8,可以使只爪8三百六十度旋转,这样的设计通过吊板1把机械臂吊于流水线的顶部,增加了机械臂的运动空间和包络的范围,减少机械臂使用中受到的局限性,增加了机械臂的实用性。
30.参照图1、图2和图4,吊杆25的顶部出口端固定连接有滚轮26,吊杆25的顶部出口端固定连接有基座,基座通过内部轴承柱转动连接有滚轮26,滚轮26的两侧设置有滚槽261,吊环27通过顶部固定板272螺栓连接有吊板1,固定板272的外径与转动盘2相互匹配,吊环27的内部设置有轨道271,轨道271与滚槽261之间相互匹配,限制滚轮26的转动方向,这样的设计可以保证转动盘2在转动过程的平稳性,防止转动盘2在转动过程中发生倾斜。
31.参照图1,第二电机41、第三电机51、第四电机61和第五电机7的出口端输出轴均固定连接有转杆42,第二电机41的输出轴与第二电机41上的转杆42固定连接,支板3内壁设置有螺纹孔,第二电机41上的转杆42的另一端与支板3通过螺纹孔固定连接。第三电机51的输出轴与第三电机51上的转杆42固定连接,第三电机51上的转杆42的另一端依次穿过第二活动臂5和第一活动臂4,第三电机51上的转杆42与第一活动臂4固定连接,第三电机51上的转杆42与第二活动臂5转动连接。第四电机61安装于第三活动臂6的一侧顶部,第四电机61的输出轴与第四电机61上的转杆42固定连接,第四电机61上的转杆42的另一端与第二活动臂5的一侧底部固定连接,避免转杆42的出现松动和脱落,从而导致第二电机41出现空转的现
象,增加了机械臂的安全性。
32.参照图1和图3,第二活动臂5的内部转动连接有支撑柱52,支撑柱52靠近第三活动臂6的一侧焊接有夹板521,支撑柱52的厚度大于夹板521,夹板521的厚度小于第三活动臂6中间间距,这样的设计增加了第三活动臂6的横向结构强度,减少第三活动臂6在工作中发生形变的可能,保障了机械臂的安全性。
33.参照图1,第三活动臂6的底部设置有插板62,插板62与第五电机7之间相互匹配,插板62的内径与第五电机7之间相互契合,这样的设计增加第五电机7的稳固性,避免只爪8抓取物件压力过大导致的第五电机7本体反转,增加了机械臂使用的安全性。
34.参照图1,只爪8的顶部设置有第六电机81,第六电机81通过底部联轴器82齿轮啮合有相对的一组半月爪83,半月爪83的顶部出口端焊接有齿轮,一组半月爪83之间相啮合,联轴器82与一侧的半月爪83之间相互啮合,联轴器82通过控制一侧的半月爪83实现了半月爪83开合的目的,第三活动臂6的一侧设置有传感器63,传感器63与第六电机81之间电性连接,传感器63的设计可以检测半月爪83之间的压力,避免半月爪83之间压力过大导致的产品破损,影响产品质量。
35.本技术实施例的一种流水线用反吊抓取机械臂的实施原理为:第一电机22通过出口端输出轴控制蜗轮23旋转,蜗轮23啮合有齿轮轴24,齿轮轴24带动圆盘21旋转,滚轮26在吊环27内部滚动,减小摩擦力,通过吊环27与吊杆25之间的相互配合,保持圆盘21的稳定性,支板3通过第二电机41控制第一活动臂4旋转,第一活动臂4通过第三电机51控制第二活动臂5的旋转,第二活动臂5通过第四电机61控制第三活动臂6的旋转,第三活动臂6底部固定连接有第五电机7,第五电机7通过底部出口端的输出轴控制只爪8三百六十度旋转,这样的设计通过吊板1把机械臂吊于流水线的顶部,增加了机械臂的运动空间和包络的范围,减少机械臂使用中受到的局限性,增加了机械臂的实用性。
36.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。