1.本发明涉及低温存储技术领域,具体为生物样本库样本中转装置。
背景技术:
2.随着生物医疗的发展,对生物样本库、疫苗库等自动化程度要求越来越高。生物样本通常是冻存在样本试管中,样本试管通过样本盒置于存储架上,在低温环境下冷藏,以保证样本的稳定并延长储存时间。
3.而在超低温环境下,生物样本的存储需要采用自动化拿取设备,现有技术中,抓取机械手结构复杂,控制过程繁琐,动作执行效率差,不能满足多生物样本快速抓取、快速转移的要求,同时生物样本库需存储不同的生物样本或疫苗等,需要一个中转区通过中转装置配合人工输入的信息对不同的生物样本、疫苗进行信息录入或拿取。
4.基于此,亟需设计一种新的生物样本库样本中转装置,解决上述问题。
技术实现要素:
5.本发明的目的在于提供生物样本库样本中转装置,以解决上述背景技术中提出的问题。
6.生物样本库样本中转装置,其包括:
7.中转支撑架及安装于中转支撑架上的x轴轨道;
8.安装于x轴轨道上的、可沿x轴轨道滑动的y轴轨道;
9.安装于y轴轨道上的、可沿y轴轨道滑动的z轴轨道;
10.安装于z轴轨道上的、可沿z轴轨道滑动的z轴搭载板;
11.设置于y轴轨道行程上的自动处理台;
12.z轴搭载板上安装有机械手;
13.所述机械手包括用于夹取试管盒的机械手手臂以及用于驱动机械手手臂完成夹取动作的机械手驱动电机、机械手传动机构。
14.所述机械手手臂包括第一机械手手臂、第二机械手手臂;
15.所述机械手传动机构包括第一机械手齿条、第二机械手齿条以及设置于第一机械手齿条、第二机械手齿条中间的与第一机械手齿条、第二机械手齿条啮合的驱动齿轮轴;
16.第一机械手手臂、第二机械手手臂分别与第一机械手齿条、第二机械手齿条固定连接;
17.驱动齿轮轴与机械手驱动电机连接,由驱动电机带动旋转,驱动第一机械手齿条、第二机械手齿条向相反方向滑动。
18.进一步,所述x轴轨道上安装有x轴齿条,y轴轨道上对应安装有x轴电机,x轴电机的输出轴连接有与x轴齿条啮合的x轴齿轮,由x轴电机带动y轴轨道沿x轴轨道滑动。
19.进一步,所述y轴轨道上安装有可沿y轴轨道滑动的z轴轨道,z轴轨道上设置有y轴电机,y轴电机的输出轴连接y轴齿轮;y轴轨道上设置有与y轴齿轮啮合的y轴齿条;y轴电机
带动z轴轨道沿y轴轨道滑动。
20.进一步,所述z轴轨道上安装有z轴电机,z轴电机的输出轴连接z轴齿轮;z轴搭载板上安装有与z轴齿轮啮合的z轴齿条;由z轴电机带动z轴搭载板、机械手沿z轴轨道滑动。
21.进一步,所述第一机械手手臂通过第一限位块连接第一机械手齿条,第二机械手手臂通过第二限位块连接第二机械手齿条,第一限位块、第二限位块对第一机械手手臂、第二机械手手臂起至限位作用,避免接触碰撞。
22.进一步,第一机械手齿条、第二机械手齿条外侧设置有封装壳,所述封装壳内部设置有机械手滑轨,所述机械手滑轨包括第一机械手滑轨、第二机械手滑轨,第一机械手齿条、第二机械手齿条分别通过滑条连接于第一机械手滑轨、第二机械手滑轨内。
23.进一步,所述自动处理台上设置有台面,台面上设置有用于暂存生物样本试剂盒的暂存区、用于与搬运机构对接的对接区、设置有扫描仪,用于对不同的生物样本试管进行扫描记录信息的扫描区。
24.进一步,还设置有人工处理台,用于搭载生物样本进行人工处理操作。
25.与现有技术相比,本发明的有益效果是:
26.第一、设计了用于搭载机械手移动x轴轨道、y轴轨道、z轴轨道,使机械手根据设计需要对处理台上的生物样本进行拿取移动操作,并通过自动处理台、人工处理台,可快速高效地录入不同生物样本的信息、挑选不同的生物样本试剂,提高了生物样本库的工作效率、使用范围;
27.第二、机械手通过机械结构设计使控制过程简化,设计了第一机械手齿条、第二机械手齿条以及与其啮合的驱动齿轮轴传动机构,驱动齿轮轴转动过程中,带动第一机械手齿条、第二机械手齿条向相反的方向运动,只需控制驱动齿轮轴连接的驱动电机的正转、反转即可完成第一机械手手臂、第二机械手手臂的抓取与释放动作;
28.第三、机械手设计了第一限位块、第二限位块,分别安装于第一机械手手臂、第二机械手手臂上,起到限位作用,避免接触碰撞;设计了封装壳,在封装壳内部设置了第一机械手齿条、第二机械手齿条的滑轨,保证了第一机械手齿条、第二机械手齿条的滑动动作顺畅,效率大大提升。
附图说明
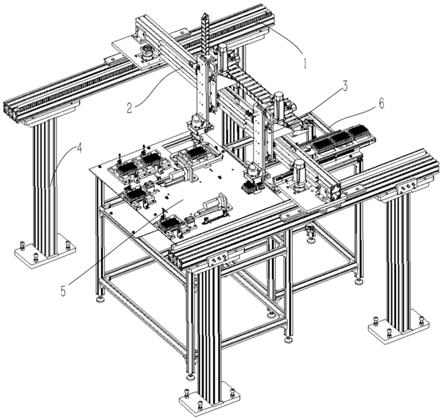
29.图1为生物样本库样本中转装置整体结构示意图;
30.图2为x轴轨道、y轴轨道、z轴轨道结构示意图;
31.图3为图2的局部结构放大示意图;
32.图4为x轴轨道、y轴轨道、z轴轨道及局部结构示意图;
33.图5为自动处理台及人工处理台结构示意图;
34.图6为机械手的整体结构示意图;
35.图7为机械手的内部结构示意图一;
36.图8为机械手的内部结构示意图二;
37.图9为试管盒及机械手手臂结构示意图。
38.图中:
39.x轴轨道1、x轴齿条11、x轴电机12、x轴齿轮13、
40.y轴轨道2、y轴齿条22、y轴电机23、y轴齿轮24、
41.z轴轨道3、z轴搭载板31、z轴电机32、z轴齿轮33、z轴齿条34、
42.中转支撑架4、自动处理台5、台面51、扫描区52、扫描仪53、对接区54、暂存区55、人工处理台6、机械手7、
43.机械手驱动电机71、封装壳72、机械手滑轨73、第一机械手滑轨731、第二机械手滑轨732、机械手手臂74、第一机械手手臂741、第二机械手手臂742、限位块75、第一限位块751、第二限位块752、机械手传动机构76、第一机械手齿条761、第二机械手齿条762、驱动齿轮轴763。
具体实施方式
44.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
45.请参阅图1-5,生物样本库样本中转装置,其包括中转支撑架4及安装于中转支撑架4上的x轴轨道1;安装于x轴轨道1上的、可沿x轴轨道1滑动的y轴轨道2;安装于y轴轨道2上的、可沿y轴轨道2滑动的z轴轨道3;安装于z轴轨道3上的、可沿z轴轨道3滑动的z轴搭载板31;设置于y轴轨道2行程上的自动处理台5;z轴搭载板31上安装有机械手7。
46.参照图6-图9,试管盒中搭载有若干试剂管,机械手的抓取对象是试管盒,为此,本发明设计了生物样本库样本中转装置,包括用于夹取试管盒的机械手手臂74、用于驱动机械手手臂74完成夹取动作的机械手驱动电机71、机械手传动机构76。
47.机械手手臂74有两条,包括第一机械手手臂741、第二机械手手臂742;机械手传动机构76包括第一机械手齿条761、第二机械手齿条762以及设置于第一机械手齿条761、第二机械手齿条762中间的与第一机械手齿条761、第二机械手齿条762啮合的驱动齿轮轴763。
48.第一机械手手臂741、第二机械手手臂742分别与第一机械手齿条761、第二机械手齿条762固定连接。驱动齿轮轴763与机械手驱动电机71连接。
49.抓取过程如下:驱动电机71带动驱动齿轮轴763旋转,驱动第一机械手齿条761、第二机械手齿条762向相反方向滑动,使第一机械手手臂741、第二机械手手臂742张开,生物样本试剂管抓取机械手由其它机构带动至所要抓取的试管盒77的位置,继续控制驱动电机71反向转动,使第一机械手手臂741、第二机械手手臂742夹紧试管盒77,并由其它机构带动将试管盒77移动至指定位置。
50.机械手7设置第一限位块751、第二限位块752,第一机械手手臂741通过第一限位块751连接第一机械手齿条761,第二机械手手臂742通过第二限位块752连接第二机械手齿条762,第一限位块751、第二限位块752对第一机械手手臂741、第二机械手手臂742起至限位作用,避免接触碰撞。
51.第一机械手齿条761、第二机械手齿条762外侧设置有封装壳72,所述封装壳72内部设置有机械手滑轨73,所述机械手滑轨73包括第一机械手滑轨731、第二机械手滑轨732,第一机械手齿条761、第二机械手齿条762分别通过滑条连接于第一机械手滑轨731、第二机械手滑轨732内,使滑动动作顺畅,效率大大提升。
52.机械手7的移动需要依靠x轴轨道1、y轴轨道2、z轴轨道3的搭载,所述x轴轨道1上安装有x轴齿条11,y轴轨道2上对应安装有x轴电机12,x轴电机12的输出轴连接有与x轴齿条11啮合的x轴齿轮13,由x轴电机12带动y轴轨道2沿x轴轨道1滑动。
53.所述y轴轨道2上安装有可沿y轴轨道2滑动的z轴轨道3,z轴轨道3上设置有y轴电机23,y轴电机23的输出轴连接y轴齿轮24;y轴轨道2上设置有与y轴齿轮24啮合的y轴齿条22;y轴电机23带动z轴轨道3沿y轴轨道2滑动。
54.所述z轴轨道3上安装有z轴电机32,z轴电机32的输出轴连接z轴齿轮33;z轴搭载板31上安装有与z轴齿轮33啮合的z轴齿条34;由z轴电机32带动z轴搭载板31、机械手7沿z轴轨道3滑动。
55.x轴轨道1、y轴轨道2、z轴轨道3内设置有自动处理台5和人工处理台6。所述自动处理台5上设置有台面51,台面51上设置有用于暂存生物样本试剂盒的暂存区55、用于与搬运机构对接的对接区54、设置有扫描仪53,用于对不同的生物样本试管进行扫描记录信息的扫描区52。人工处理台6,用于搭载生物样本进行人工处理操作。
56.通过x轴轨道1、y轴轨道2、z轴轨道3的设计,机械手7可沿x轴轨道、y轴轨道、z轴轨道滑动,将试管盒搬运至自动处理台5和人工处理台6的不同位置。
57.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。