小型工业用桌面机械臂及其底座、机器人
1.本案为分案申请,其母案申请号为202011259843.5,申请日为2020年11月11日,案件名称为桌面机械臂的底座、桌面机械臂及机器人。
技术领域
2.本发明涉及桌面机械臂技术领域,具体涉及一种小型工业用桌面机械臂的底座、小型工业用桌面机械臂及机器人。
背景技术:
3.小型工业用桌面机械臂是机械臂的一个细分品类,其具备强适应性以及动态问题解决能力,被广泛应用于教学领域,一般由底座、转台、大臂、小臂、末端以及转台电机、大臂电机和小臂电机构成,转台与底座可旋转的连接,大臂分别与转台和小臂连接,小臂与末端连接,末端用于设置执行器,转台电机用于驱动转台相对于底座旋转,大臂电机用于驱动大臂运动,小臂电机用于驱动小臂运动,大臂与小臂利用平行四边形原理能够驱动末端在工作空间内运动,如申请号为cn201620105515.2的中国专利。
4.现有的小型工业用桌面机械臂,存在两种布置转台电机的方案,一种是将转台电机一般倒装在大臂电机、小臂电机之间,转台电机的输出轴通过同步带转台减速组件与底座固定连接,电机工作时,底座不动,电机带动本体及转台减速组件一起转动,导致负载大,电机寿命不高,控制精度差,功耗也高,如申请号为cn201910571696.6的中国专利;另一种是将转台电机与减速器倒装在转台上,转台电机输出轴通过减速器直接与底座连接,这种方式的底座重心较高,整机重心前倾,稳定性较差,降低了小型工业用桌面机械臂的限载重量,如申请号为cn201810921858.x的中国专利。
技术实现要素:
5.本发明的主要目的在于提供一种小型工业用桌面机械臂的底座,以解决背景技术中提出的技术问题。
6.为实现上述目的,本发明提出的小型工业用桌面机械臂的底座,该底座包括盒状壳体以及设置在所述盒状壳体内的转台驱动电机、转台减速组件和转台驱动轴,所述转台驱动轴设置于所述盒状壳体中心区域,所述转台驱动电机错位设置于所述转台驱动轴周围,且所述转台驱动电机的输出轴朝上布置,所述转台驱动电机通过所述转台减速组件与所述转台驱动轴传动连接;所述转台减速组件包括转台一级同步带轮和转台二级同步带轮;所述转台一级同步带轮的一端与所述转台驱动电机传动连接,另一端与所述转台二级同步带轮的一端传动连接,所述转台二级同步带轮的另一端与所述转台驱动轴传动连接;所述盒状壳体内构造有在水平方向上延展的隔板,所述转台一级同步带轮设置在所述隔板顶面上,所述转台驱动电机设置于所述隔板底面之下,所述转台驱动电机的输出轴穿出所述隔板与所述转台一级同步带轮的一端传动连接,所述转台二级同步带轮设置在所述隔板底面上。
7.在一些实施例中,所述转台驱动轴通过推力轴承设置在所述隔板上。
8.在一些实施例中,所述隔板上构造容纳腔,所述容纳腔构造有与所述推力轴承的外环下缘相适配的承接结构,所述推力轴承设置于所述容纳腔之内,且所述推力轴承的外环下缘与所述承接结构相接,所述转台驱动轴在竖直方向上自上而下的插入所述推力轴承的内环设置,所述转台驱动轴构造有承载段、插装段和连接段,所述承载段与所述推力轴承的内环上缘抵接,所述插装段与所述推力轴承的内环内抵接,所述连接段与所述转台二级同步带轮传动连接。
9.在一些实施例中,所述底座还包括:轴承压板,所述轴承压板构造为中空环形,所述轴承压板设置于所述推力轴承之上并与所述推力轴承的外环抵接,所述轴承压板与所述隔板固定连接。
10.在一些实施例中,所述推力轴承为双列角接触轴承。
11.在一些实施例中,所述转台一级同步带轮包括转台一级主动轮、转台一级从动轮和转台一级同步带,所述转台一级主动轮和所述转台一级从动轮通过所述转台一级同步带传动连接;所述转台二级同步带轮包括转台二级主动轮、转台二级从动轮和转台二级同步带,所述转台二级主动轮和所述转台二级从动轮通过所述转台二级同步带传动连接;所述底座还包括转台传动轴,且所述隔板构造有供所述转台传动轴穿过的轴孔,所述转台传动轴包括安装套、两个轴承以及轴体,所述两个轴承分别过盈配合地设置于所述安装套的两端,所述轴体设置于所述安装套之内并同时与所述两个轴承内环相连接,所述轴体一端穿过所述轴孔与所述转台一级从动轮连接,另一端与所述转台二级主动轮连接。
12.在一些实施例中,所述底座还包括:多个第一固定螺钉以及第一张紧机构;所述隔板构造有多个第一腰型孔,所述第一固定螺钉通过所述第一腰型孔与所述安装套固定连接;所述第一张紧机构包括第一支架和第一转动螺栓,所述第一支架构造有第一连接端和第一螺纹端,所述第一张紧机构通过所述第一连接端与所述隔板固定连接,所述第一张紧机构位于所述隔板之下,所述第一转动螺栓与所述第一螺纹端可转动地连接,所述第一转动螺栓的螺头靠近所述安装套设置,通过转动所述第一转动螺栓可以调整所述第一转动螺栓在水平方向上的位置,使所述第一转动螺栓的螺头与所述安装套相抵接,并通过挤压所述安装套,使所述安装套在沿所述第一腰型孔对应的轨迹移动。
13.在一些实施例中,所述转台二级从动轮与所述连接段可拆卸连接,转台二级从动轮构造有抵接结构,所述抵接结构构造成与所述连接段相适配的环形状,所述转台二级从动轮与所述连接段固定连接时所述抵接结构与所述推力轴承的内环的下缘相抵接,且所述转台二级从动轮上设置有连接结构,所述连接结构为多个螺纹通孔,所述连接段构造有与所述螺纹通孔适配的螺纹孔。
14.在一些实施例中,所述底座还包括定位销,所述连接段设置有定位孔,所述转台二级从动轮设置有定位通孔,所述定位销通过所述定位通孔插入所述定位孔设置。
15.在一些实施例中,所述底座还包括:多个第二固定螺钉以及第二张紧机构;所述隔板构造有多个第二腰型孔,所述第二固定螺钉通过所述第二腰型孔与所述转台驱动电机固定连接;所述第二张紧机构包括第二支架和第二转动螺栓,所述第二支架构造有第二连接端和第二螺纹端,所述第二张紧机构通过所述第二连接端与所述隔板固定连接,所述第二张紧机构位于所述隔板之下,所述第二转动螺栓与所述螺纹端可转动地连接,所述第二转
动螺栓的螺头靠近所述转台驱动电机设置,通过转动所述第二转动螺栓可以调整所述第二转动螺栓在水平方向上的位置,使所述第二转动螺栓的螺头与所述转台驱动电机相抵接,并通过挤压所述转台驱动电机,使所述转台驱动电机在沿所述第二腰型孔对应的轨迹移动。
16.在一些实施例中,所述盒状壳体还包括顶板和底板,所述顶板包括第一盖板和第一盖板,所述第一盖板和所述第二盖板分别构造有半圆形缺口,所述第一盖板和所述第二盖板设置于所述隔板之上并与所述盒状壳体可拆卸连接,所述第一盖板和所述第二盖板的半圆形缺口合并构成圆形缺口,所述圆形缺口处于所述转台驱动轴的竖直方向之上,所述底板设置于所述隔板之下并与所述盒状壳体可拆卸连接。
17.在一些实施例中,所述转台驱动电机为伺服电机,所述伺服电机上设置有编码器,所述编码器为绝对值编码器,所述盒状壳体内还设置有与所述绝对值编码器电连接的电池安装座。
18.本发明进一步提出一种小型工业用桌面机械臂,该小型工业用桌面机械臂包括转台、大臂、小臂和上述的底座,该底座包括盒状壳体以及设置在所述盒状壳体内的转台驱动电机、转台减速组件和转台驱动轴,所述转台驱动轴设置于所述盒状壳体中心区域,所述转台驱动电机错位设置于所述转台驱动轴周围,且所述转台驱动电机的输出轴朝上布置,所述转台驱动电机通过所述转台减速组件与所述转台驱动轴传动连接;所述转台减速组件包括转台一级同步带轮和转台二级同步带轮;所述转台一级同步带轮的一端与所述转台驱动电机传动连接,另一端与所述转台二级同步带轮的一端传动连接,所述转台二级同步带轮的另一端与所述转台驱动轴传动连接;所述盒状壳体内构造有在水平方向上延展的隔板,所述转台一级同步带轮设置在所述隔板顶面上,所述转台驱动电机设置于所述隔板底面之下,所述转台驱动电机的输出轴穿出所述隔板与所述转台一级同步带轮的一端传动连接,所述转台二级同步带轮设置在所述隔板底面上。
19.在一些实施例中,所述小型工业用桌面机械臂还包括与所述小臂连接的末端执行器。
20.本发明进一步提出一种机器人,该机器人包括上述的小型工业用桌面机械臂,该小型工业用桌面机械臂包括上述底座,上述底座包括盒状壳体以及设置在所述盒状壳体内的转台驱动电机、转台减速组件和转台驱动轴,所述转台驱动轴设置于所述盒状壳体中心区域,所述转台驱动电机错位设置于所述转台驱动轴周围,且所述转台驱动电机的输出轴朝上布置,所述转台驱动电机通过所述转台减速组件与所述转台驱动轴传动连接;所述转台减速组件包括转台一级同步带轮和转台二级同步带轮;所述转台一级同步带轮的一端与所述转台驱动电机传动连接,另一端与所述转台二级同步带轮的一端传动连接,所述转台二级同步带轮的另一端与所述转台驱动轴传动连接;所述盒状壳体内构造有在水平方向上延展的隔板,所述转台一级同步带轮设置在所述隔板顶面上,所述转台驱动电机设置于所述隔板底面之下,所述转台驱动电机的输出轴穿出所述隔板与所述转台一级同步带轮的一端传动连接,所述转台二级同步带轮设置在所述隔板底面上。
21.本发明实施例提供的小型工业用桌面机械臂的底座,通过将转台驱动电机、转台减速组件和转台驱动轴布置在盒状壳体内,并利用转台驱动轴与转台连接以驱动转台转动,降低了转台的重量,以提高转台电机的寿命和精度,也可降低电机的功耗。同时,本方案
中的底座通过转台驱动电机错位布置在转台驱动轴的周围,以此有利于降低底座的高度,从而有利于降低底座的重心和提高底座的稳定性。
附图说明
22.图1为一种现有桌面机械臂的结构示意图;
23.图2为另一种现有桌面机械臂的结构示意图;
24.图3为又一种现有桌面机械臂的结构示意图;
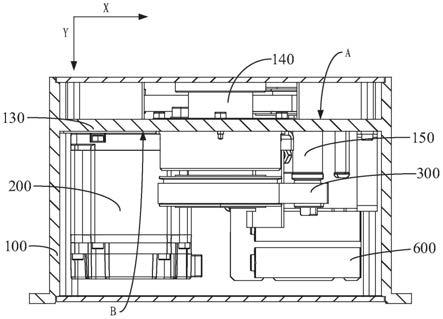
25.图4为本发明中小型工业用桌面机械臂的底座一实施例的剖视图;
26.图5为图4中所示的底座部分结构一视角下的结构示意图;
27.图6为图4中所示的底座部分结构另一视角下的结构示意图;
28.图7为图4中所示的底座部分结构的剖视图;
29.图8为图4中所示的底座部分结构的剖视图;
30.图9为图4中所示的盒状壳体、顶板以及底板的爆炸示意图;
31.图10为图4中所示的底座部分结构又一视角下的结构示意图;
32.图11为图10中所示的第一张紧机构的结构示意图;
33.图12为本发明中小型工业用桌面机械臂一实施例的结构示意图。
具体实施方式
34.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
35.本发明是基于如图1、图2和图3所示的小型工业用桌面机械臂提出的改进方案,如图1所示的桌面机械臂由底座、转台、大臂、小臂、末端以及转台电机、大臂电机和小臂电机构成,转台与底座可旋转的连接,大臂分别与转台和小臂连接,小臂与末端连接,末端用于设置执行器,转台电机用于驱动转台相对于底座旋转,大臂电机用于驱动大臂运动,小臂电机用于驱动小臂运动,大臂与小臂利用平行四边形原理能够驱动末端在工作空间内运动。如图2所示的桌面机械臂,将转台电机倒装在大臂电机、小臂电机之间,转台电机的输出轴通过同步带转台减速组件与底座固定连接,电机工作时,底座不动,电机带动本体及转台减速组件一起转动,导致负载大,电机寿命不高,控制精度差,功耗也高。如图3所示的桌面机械臂,将转台电机与减速器倒装在转台上,转台电机输出轴通过减速器直接与底座连接,这种方式的底座重心较高,整机重心前倾,稳定性较差,降低了小型工业用桌面机械臂的限载重量。
36.本发明提出一种小型工业用桌面机械臂的底座,如图4所示,该底座包括盒状壳体100以及设置在盒状壳体100内的转台驱动电机200、转台减速组件300、转台驱动轴140,转台驱动轴140设置于盒状壳体100中心区域,转台驱动电机200错位设置于转台驱动轴140周围,且转台驱动电机200的输出轴朝上,转台驱动电机200通过转台减速组件300驱动转台驱动轴140转动。
37.本实施例中,盒状壳体100优选设置为矩形(此时,根据盒状壳体100的布置状态,如图4中所示的x代表水平方向,y代表竖直方向),转台驱动电机200、转台减速组件300和转台驱动轴140均固定在盒状壳体100内,且优选转台驱动轴140位于盒状壳体100的中心区域,即转台驱动轴140位于盒状壳体100顶部的中心位置。同时,转台驱动电机200错位布置在转台驱动轴140的周围,以此有利于降低底座的高度,此时优选转台电机200的输出轴竖直向上布置。进一步地,转台驱动电机200通过转台减速组件300驱动转台驱动轴转动,以便于与转台驱动轴140连接的转台转动。其中,转台减速组件300的形式可以是减速器或同步带。本实施例中,相较于图2所示的机械臂,本方案中的底座通过将转台驱动电机200、转台减速组件300和转台驱动轴140布置在盒状壳体100内,并利用转台驱动轴140与转台连接以驱动转台转动,降低了转台的重量,以可提高转台电机200的寿命和精度,也可降低电机的功耗。同时,相较于图3所示的机械臂,本方案中的底座通过转台驱动电机200错位布置在转台驱动轴140的周围,以此有利于降低底座的高度,从而有利于降低底座的重心和提高底座的稳定性。
38.在一较佳实施例中,如图4至图6所示,优选转台减速组件300包括转台一级同步带轮310和转台二级同步带轮320,且转台一级同步带轮310分别与转台驱动电机200和转台二级同步带轮320传动连接,且转台二级同步带轮320还与转台驱动轴140传动连接。此时,转台一级同步带轮310和转台二级同步带轮320布置在盒状壳体100内的方式可才用一般的固定方式即可,如盒状壳体100内设置有多个支撑件,以分别对转台驱动电机200、转台一级同步带轮310和转台二级同步带轮320进行固定。本实施例中,通过同步带轮的方式进行减速,从而有利于在保证控制精度的情况下降低底座的制造成本。
39.在一较佳实施例中,如图4至图6所示,此时根据盒状壳体100的布置状态,如图4中所示a代表隔板130顶面,b代表隔板130底面,优选盒状壳体100内水平设置有隔板130,以将盒状壳体100的内部空间分割两个空间,且优选隔板130与盒状壳体100顶部之间的距离小于隔板130与盒状壳体100底部之间的距离,而转台一级同步带轮310设置在隔板130的顶面上,转台二级同步带轮320和转台驱动电机200均位于设置在隔板130的底面上。本实施例中,通过在盒状壳体100内设置隔板130来安装转台驱动电机200、转台一级同步带轮310和转台二级同步带轮320等部件,从而有利于增加固定上述部件的稳定性。
40.在另外的实施例中,在隔板130上安装转台驱动电机200、转台一级同步带轮310和转台二级同步带轮320的方式可以是隔板130与盒状壳体100为可拆卸连接,首先将转台驱动电机200、转台一级同步带轮310和转台二级同步带轮320固定在隔板130上,而后将隔板130固定在盒状壳体100内即可。
41.在一较佳实施例中,如图7所示,优选转台驱动轴140通过推力轴承160设置在隔板130上,且转台减速组件300(即转台二级同步带轮320)通过转台驱动轴140与转台传动连接,以此避免转台减速组件300直接承受转台的重量,从而有利于增加转台减速组件300的寿命,即当转台减速组件300的输出轴直接与转台连接时需要直接承受转台的重量,从而使得转台减速组件300受力较大,从而相当于提升了转台减速组件300的负载重量。此时,优选转台驱动轴140位于隔板130的中心位置。
42.在一较佳实施例中,如图7所示,优选隔板130的中心位置构造有安装推力轴承160的容纳腔133,且腔体的底部设置有与可承接推力轴承160的外环下缘的承载结构134,此时
优选承载结构134为环体,而推力轴承160安装在容纳腔133内后,承载结构134即可与推力轴承160的外环下缘抵接,以实现承接推力轴承160的目的,至于转台驱动轴140则在竖直方向上自上而下的插入推力轴承160的内环中即可。同时,转台驱动轴140分为自下至上分为连接段141、插装段142和承载段143(即插装段142的直径小于承载段143的直径,此时优选连接段141与插装段142的直径一致),其中插装段142可插装在推力轴承160的内环内,而连接段141则穿过推力轴承160并与转台二级同步带轮320传动连接,承载段143靠近插装段142的一端可与推力轴承160的内环上缘抵接,以使推力轴承160承接转台的重量。
43.在一较佳实施例中,如图7所示,优选底座还包括轴承压板170,且优选轴承压板170呈环形板体,该轴承压板170可套设在承载段143上,此时轴承压板170可封堵容纳腔133的开口端并可与推力轴承160的外环上缘抵接。此时优选轴承压板170与隔板130为可拆卸连接,如通过螺钉固定,从而有利于防止位于容纳腔133内的推力轴承160滑出。
44.在一较佳实施例中,优选推力轴承160为双列角接触轴承,由于双列角接触轴承只占用较小的轴向空间,从而有利于减小转台驱动轴140的长度,进而降低底座的高度。同时,由于双列角接触球轴承还可以提供刚性较高的轴承配置,并能承受倾覆力矩。
45.在一较佳实施例中,如图5所示,优选转台一级同步带轮310包括转台一级主动轮312、转台一级从动轮311和转台一级同步带313,其中转台一级主动轮312套设在转台驱动电机200的输出轴上,转台一级从动轮311通过转台传动轴150设置在隔板130上,而转台一级同步带313分别连接转台一级主动轮312和转台一级从动轮311即可,至于转台一级主动轮312和转台一级从动轮311的传动比则根据实际需要减速的情况进行布置即可。
46.同时,如图6所示,优选转台二级同步带轮320包括转台二级主动轮321、转台二级从动轮322和转台二级同步带323,其中转台二级主动轮321套设在转台传动轴150上(此时转台传动轴150的一端由上至下穿过隔板130布置),转台二级从动轮322套设在转台驱动轴140上(此时转台驱动轴140的一端由上至下穿过隔板130布置),而转台二级同步带323分别连接转台二级主动轮321和转台二级从动轮322即可,至于转台二级主动轮321和转台二级从动轮322的传动比则根据实际需要减速的情况进行布置即可。此时,优选转台驱动轴140、转台传动轴150以及转台驱动电机200的输出轴三者呈三角状态布置,从而有利于增加底座的稳定性。
47.其中,如图8所示,优选转台传动轴150包括安装套151、轴体152以及两个轴承153,且轴体152通过两个轴承153安装在安装套151内,安装套151固定在隔板130上,优选安装套151位于隔板130的下方,且隔板130上具有与安装套151对应的轴孔,以使安装在安装套151内的轴体152穿过。此时,转台一级从动轮311与轴体152位于隔板130之上的一端连接,转台二级主动轮321与轴体152位于隔板130之下的一端连接。
48.在一较佳实施例中,如图9所示,优选隔板130上具有多个第一腰型孔131,此时安装套151可以与穿过第一腰型孔131的第一固定螺钉连接,以此将安装套151固定在隔板130上,同时还可利用第一固定螺钉在第一腰型孔131内移动,以此带动位于轴体152上的转台二级主动轮321朝向或远离转台二级从动轮322移动,从而方便调节转台二级同步带323的张紧度。
49.同时,如图10和图11所示,盒状壳体100内还设置有第一张紧机构400,且第一张紧机构400设置在隔板130的底面上并位于转台二级主动轮321和转台二级从动轮322之间,第
一张紧机构400包括与隔板130连接的第一支架410和第一转动螺栓420,第一支架410包括第一连接端和第一螺纹端,第一连接端与隔板130连接,而第一转动螺栓420与第一螺纹端螺纹配合,以使第一转动螺栓420的螺头可与安装套151抵接,至于抵接的位置则可根据实际情况进行布置即可。本实施例中,在安装转台传动轴150时,首先通过第一固定螺钉穿过第一腰型孔131与安装套151连接但不完全紧固第一固定螺钉,以使转台传动轴150可跟随第一固定螺钉在第一腰型孔131内移动即可,此时通过拧动第一转动螺栓420即可驱动转台传动轴150带动转台二级主动轮321远离转台二级从动轮322移动,从而改变转台二级同步带323的张紧度,在转台二级同步带323的张紧度处于适当状态时(即转台传动轴150移动至预设位置),再利用第一固定螺钉固定安装套151即可,从而方便了转台传动轴150的安装,同时利用第一转动螺栓420与安装套151抵接也可增加转台传动轴150运行时的稳定性。
50.在一较佳实施例中,如图7所示,转台二级从动轮322套设在转台驱动轴140(即插装段142)上,且转台二级从动轮322上设置有位于转台驱动轴140正下方的连接结构324。此时,连接结构324为转台二级从动轮322上设置的多个螺纹通孔,且转台驱动轴140的底部设置有可与螺纹通孔配合的螺纹孔,此时利用螺钉依次穿过螺纹通孔和螺纹孔即可转台二级从动轮322固定在转台驱动轴140上。
51.同时,如图7所示,优选转台二级从动轮322上设置抵接结构325,且优选抵接结构325为套筒结构,并可套设在转台驱动轴140上,且抵接结构325的顶部可与推力轴承160的内环下缘抵接。此时,优选连接结构324的顶面与转台驱动轴140的底面之间间隔预设距离,即连接结构324与转台驱动轴140的底部之间存在一定的缝隙,由于加工存在一定的误差,所以为了避免连接结构324与转台驱动轴140的底部抵接时抵接结构325无法与推力轴承的内环下缘抵接,从而即可利用连接结构324与转台驱动轴140的底部之间存在一定的缝隙来避免出现上述情形,以便于利用抵接结构325与承载段143对推力轴承160形成夹持状态,以避免推力轴承160在插装段142上滑动。
52.在一较佳实施例中,如图7所示,底座还包括定位销326,连接段141的底部设置有定位孔,转台二级从动轮322上设置有定位通孔,而定位销326则可依次穿过定位通孔和定位孔将转台二级从动轮322在连接段141上进行定位,以方便转台二级从动轮322的固定。
53.在一较佳实施例中,如图9所示,优选隔板130上具有多个第二腰型孔132,此时转台驱动电机200可以与穿过第二腰型孔132的第二固定螺钉连接,以此将转台驱动电机200固定在隔板130上,同时还可利用第二固定螺钉在第二腰型孔132内移动,以此带动位于转台驱动电机200上的转台一级主动轮312朝向或远离转台一级从动轮311移动,从而方便调节转台一级同步带313的张紧度。此时,优选转台驱动电机200上具有与第二固定螺钉配合的螺纹孔,从而无需设置螺母即可对转台驱动电机200进行固定。
54.同时,如图10所示,盒状壳体100内还设置有第二张紧机构500,且第二张紧机构500设置在隔板130的底面上并位于转台一级主动轮312和转台一级从动轮311之间,第二张紧机构500包括与隔板130连接的第二支架和第二转动螺栓,第二支架包括第二连接端和第二螺纹端,第二连接端与隔板130连接,而第二转动螺栓与第二螺纹端螺纹配合,以使第二转动螺栓的螺头可与转台驱动电机200抵接,至于抵接的位置则可根据实际情况进行布置即可。本实施例中,在安装转台驱动电机200时,首先通过第二固定螺钉穿过第二腰型孔132与转台驱动电机200连接但不完全紧固第二固定螺钉,以使转台驱动电机200可跟随第二固
定螺钉在第二腰型孔132内移动即可,此时通过拧动第二转动螺栓即可驱动转台驱动电机200带动转台一级主动轮312远离转台一级从动轮311移动,从而改变转台一级同步带313的张紧度,在转台一级同步带313的张紧度处于适当状态时(即转台驱动电机200移动至预设位置),再利用第二固定螺钉固定转台驱动电机200即可,从而方便了转台驱动电机200的安装,同时利用第二转动螺栓与转台驱动电机200抵接也可增加转台驱动电机200运行时的稳定性。其中,第二张紧机构500的结构与第一张紧机构400的结构相似,在此参照图11进行布置即可。
55.在一较佳实施例中,如图9所示,优选盒状壳体100还包括顶板110和底板120,此时盒状壳体100呈两端开口的矩形状,其中顶板110和底板120分别盖合在盒状壳体100的两端,且顶板110和底板120与盒状壳体100均为可拆卸连接,以形成封闭空间。优选顶板110由第一盖板111和第二盖板112组合构成,且第一盖板111和第二盖板112上均具有半圆形缺口,且两个半圆形缺口可组合形成圆形缺口113以供转台驱动轴140穿过。此时,优选隔板130与盒状壳体100一体成型,具体可以采用焊接或雕铣的方式,从而有利于增加位于隔板130上部件的稳定性,同时还可在隔板130上设置与盒状壳体100的内壁连接的加强筋,以增加隔板130与盒状壳体100的连接强度。当然,为了方便底座的固定,盒状壳体100上靠近底板120的一端口外壁上设置有延伸边,且该延伸边上具有固定孔,从方便底座通过螺钉穿过固定孔进行固定。本实施例中,通过隔板130与盒状壳体100一体成型,从而有利于增加隔板130与盒状壳体100的连接强度,同时通过顶板110和底板120分别与盒状壳体100可拆卸连接,从而方便将上述部件分别安装在隔板130的上。
56.当然,在另外的实施例中,隔板130与盒状壳体100的连接方式可以是通过螺钉,从而方便隔板130的拆卸。此时,优选框盒状壳体100的内壁上具有可承载隔板130的承载从而便于为隔板130提供支撑点。其中,支撑台的形式可以是若干分布在盒状壳体100内壁上的块体,也可以布置在盒状壳体100内壁上的环形凸台。
57.在一较佳实施例中,优选转台驱动电机200为伺服电机,从而有利于提高转台驱动电机200驱动转台转动的精度,同时伺服电机上设置有编码器,从而更加方便利用编码器记录伺服电机的零点位置和转动圈数,以此也有利于伺服电机的回零操作的精度,同样有利于提高转台驱动电机200驱动转台转动的精度。
58.同时,优选编码器为多圈绝对值编码器,且盒状壳体100内还设置有与多圈绝对值编码器电性连接的电池安装座600,从而方便将电池安装在电池安装座内以对多圈绝对值编码器进行供电。本实施例中,相对于单圈绝对值编码器,多圈绝对值编码器具备安装调试简单、无需找零点、多功能输出和使用寿命长等优点。
59.本发明进一步提出的一种小型工业用桌面机械臂,如图12所示,该小型工业用桌面机械臂包括转台2、大臂3、小臂4和底座1,该底座1的具体结构参照上述各实施例,由于小型工业用桌面机械臂采用了上述所有实施例的所有技术方案,因此至少具有上述实施例的技术方案所带来的全部技术效果,在此不再一一赘述。其中,转台设于底座上,大臂设于转台上,小臂设于大臂上。作为优选,在小臂4的末端连接有末端执行器5,末端执行器5主要用于抓取物品,末端执行器5的运动是由转台2、大臂3和小臂4的运动复合而成。
60.本发明还提出一种机器人,该机器人包括前述各实施例记载的小型工业用桌面机械臂,由于小型工业用桌面机械臂采用了上述所有实施例的所有技术方案,因此至少具有
上述实施例的技术方案所带来的全部技术效果,在此不再一一赘述。
61.以上的仅为本发明的部分或优选实施例,无论是文字还是附图都不能因此限制本发明保护的范围,凡是在与本发明一个整体的构思下,利用本发明说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本发明保护的范围内。