1.本发明属于机器人自动化领域,更具体地说,尤其是涉及到一种工业机器人自动化控制装置。
背景技术:
2.随着现代技术的飞速发展,机器人技术也不断成熟,在工业领域上被广为应用,工业机器人水平不断提高,在控制下完成自动化工业作业,降低劳动力的同时也提高工业生产率。
3.基于上述本发明人发现,现有的工业机器人自动化控制装置存在以下不足:机器人自动化控制装置在数据参数操控后,自行完成物体的抓取、换位、放置等动作,顺畅完成这些动作需要保证带动柱在位移轨中能稳定滑移,而呈圆柱状且为镀铜镀铁材质的带动柱,在滑移中容易出现磨损、进而产生生锈物质,使带动柱外周面不光滑,导致带动柱在位移轨中的滑移不顺畅,影响机器人自动化作业。
4.因此需要提出一种工业机器人自动化控制装置。
技术实现要素:
5.针对现有技术存在的不足,本发明目的是提供一种工业机器人自动化控制装置,以解决现有技术的问题。
6.为了实现上述目的,本发明是通过如下的技术方案来实现:一种工业机器人自动化控制装置,其结构设有控电台、驱转箱、传动架、活动控制装置、抓取装置,所述驱转箱安装在控电台上方,所述传动架连接在驱转箱上方且活动配合,所述活动控制装置与传动架前端传动配合,所述抓取装置与活动控制装置内侧滑动配合。
7.所述抓取装置设有带动柱、感应机、配合杆、机器人夹爪,所述带动柱与活动控制装置内侧滑动配合,所述感应机固定连接在带动柱下端,所述配合杆两端与感应机和机器人夹爪分别铰接连接,所述机器人夹爪通过配合杆与感应机活动配合且活动于其下方。
8.作为本发明的进一步改进,所述活动控制装置设有外架、转柱、板带、位移轨、升降架,所述转柱与传动架传动配合,所述抓取装置与位移轨滑动配合,所述转柱嵌入活动在外架内部偏后位置处,所述板带环绕连接在转柱外,所述板带另一端与带动柱相连接,所述升降架活动配合在外架外侧底部位置处,所述转柱呈柱状且可做自转活动,所述板带具有一定长度。
9.作为本发明的进一步改进,所述位移轨设有侧腔、铲刮装置、通道,所述抓取装置与通道滑动配合,所述侧腔与活动控制装置为一体化结构且设在其侧端,所述铲刮装置末端嵌入于侧腔中,所述铲刮装置设在通道侧端,所述侧腔内部呈空槽状态,所述铲刮装置设有八个,且每四个为一列,设有两列且呈对称设置,所述通道为抓取装置的滑行提供活动移动限度。
10.作为本发明的进一步改进,所述铲刮装置设有扣块、衔接架、铲除块,所述扣块嵌
入于侧腔中,所述铲除块设在通道侧端,所述衔接架末端与扣块相穿接且活动配合,所述衔接架前端与铲除块相连接,所述扣块为弧形结构的硅胶材质块状物,具有一定韧性,受力可进行形变,所述衔接架呈侧向八字状态,所述铲除块呈三角状态的块状物,设有两个,且呈对称设置。
11.作为本发明的进一步改进,所述衔接架设有弧架、摆折杆、弹簧钢、扯块、实块,所述弧架两端与实块铰接连接,所述摆折杆一端与实块铰接连接,所述弹簧钢滑动配合在摆折杆之间,所述扯块连接在摆折杆末端之间,所述弧架呈弧状结构,且具有伸缩性,所述摆折杆可进行支点式摆折,所述扯块为顺丁橡胶材质块状物,具有较好的牵扯性。
12.作为本发明的进一步改进,所述铲除块设有实角块、落口、兜块,所述落口与实角块为一体化结构且相贯通,所述兜块位于落口后方,所述实角块呈三角结构,所述落口在实角块边缘端呈下陷的弧向凹槽状,所述兜块为厚度较小的橡胶片块结构,具有弹性,且与落口之间的间距为空腔状态,空间大小可变动。
13.作为本发明的进一步改进,所述弧架与扣块相穿接且活动配合,所述摆折杆与铲除块相连接,所述弧架的弧状结构与扣块的弧状结构相扣合,所述摆折杆在铲除块侧边上可进行滑动,令摆折杆间距变动。
14.作为本发明的进一步改进,所述摆折杆与实角块侧边滑动连接,所述扯块与实角块间隙配合,所述实角块的角状结构随受力不同而能进行小幅度角度翻转。
15.与现有技术相比,本发明具有如下有益效果:1.通过带动柱在通道中往复滑移,带动柱外端面不断与铲刮装置产生接触,衔接架辅助铲除块随受到的挤压力不同而产生位置变换,令铲除块受到的触压力被及时减缓,避免对带动柱在滑移过程中造成阻碍,同时角状的铲除块与带动柱接触着,在带动柱移行下能对其外侧产生一定的抵力作为铲刮作用力,便于将其外侧被磨损而出现的废屑物铲下,及时做清理。
16.2.通过弧架的弧状结构及其可伸缩性质,其辅助带动摆折杆有位置变动,令摆折杆撑在实角块侧边,使实角块对带动柱相抵时产生的铲刮效果更佳,摆折杆整体的倾斜度变动,利于衔接架整体随受力不同而产生不同的带动力,作为铲除块位置变化的效果力,带动柱外的废屑物被铲刮下,经由落口得以被收集,兜块的韧性使其随收纳物质量的多少而可以改变与落口间的空间大小,从而令铲除块在做铲刮作业后也能对铲下的物质进行收集。
附图说明
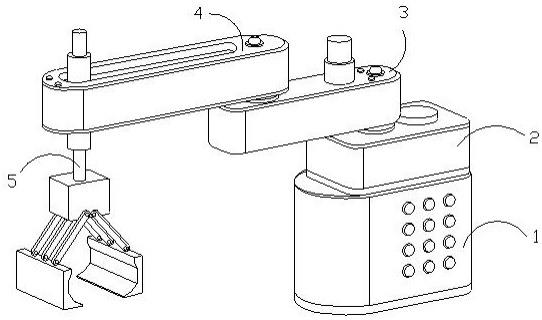
17.图1为本发明一种工业机器人自动化控制装置的结构示意图。
18.图2为本发明一种抓取装置的内部侧视结构示意图。
19.图3为本发明一种活动控制装置的内部侧视结构示意图。
20.图4为本发明一种位移轨的内部俯视结构示意图。
21.图5为本发明一种铲刮装置的内部俯视结构示意图。
22.图6为本发明一种衔接架的内部俯视结构示意图。
23.图7为本发明一种铲除块的内部俯视结构示意图。
24.图中:控电台-1、驱转箱-2、传动架-3、活动控制装置-4、抓取装置-5、带动柱-51、
感应机-52、配合杆-53、机器人夹爪-54、外架-41、转柱-42、板带-43、位移轨-44、升降架-45、侧腔-441、铲刮装置-442、通道-443、扣块-a1、衔接架-a2、铲除块-a3、弧架-a21、摆折杆-a22、弹簧钢-a23、扯块-a24、实块-a25、实角块-a31、落口-a32、兜块-a33。
具体实施方式
25.以下结合附图对本发明做进一步描述:实施例1:如附图1至附图5所示:本发明提供一种工业机器人自动化控制装置,其结构设有控电台1、驱转箱2、传动架3、活动控制装置4、抓取装置5,所述驱转箱2安装在控电台1上方,所述传动架3连接在驱转箱2上方且活动配合,所述活动控制装置4与传动架3前端传动配合,所述抓取装置5与活动控制装置4内侧滑动配合。
26.所述抓取装置5设有带动柱51、感应机52、配合杆53、机器人夹爪54,所述带动柱51与活动控制装置4内侧滑动配合,所述感应机52固定连接在带动柱51下端,所述配合杆53两端与感应机52和机器人夹爪54分别铰接连接,所述机器人夹爪54通过配合杆53与感应机52活动配合且活动于其下方。
27.其中,所述活动控制装置4设有外架41、转柱42、板带43、位移轨44、升降架45,所述转柱42与传动架3传动配合,所述抓取装置5与位移轨44滑动配合,所述转柱42嵌入活动在外架41内部偏后位置处,所述板带43环绕连接在转柱42外,所述板带43另一端与带动柱51相连接,所述升降架45活动配合在外架41外侧底部位置处,所述转柱42呈柱状且可做自转活动,所述板带43具有一定长度,所述板带43在转柱42的旋转下被拉紧或松放,配合抓取装置5的位移活动。
28.其中,所述位移轨44设有侧腔441、铲刮装置442、通道443,所述抓取装置5与通道443滑动配合,所述侧腔441与活动控制装置4为一体化结构且设在其侧端,所述铲刮装置442末端嵌入于侧腔441中,所述铲刮装置442设在通道443侧端,所述侧腔441内部呈空槽状态,所述铲刮装置442设有八个,且每四个为一列,设有两列且呈对称设置,所述通道443为抓取装置5的滑行提供活动移动限度,铲刮装置442随抓取装置5滑移过程中,与其间隙配合并随受到的挤压力不同而产生位置变换,便于对抓取装置5外的物质做铲除作业。
29.其中,所述铲刮装置442设有扣块a1、衔接架a2、铲除块a3,所述扣块a1嵌入于侧腔441中,所述铲除块a3设在通道443侧端,所述衔接架a2末端与扣块a1相穿接且活动配合,所述衔接架a2前端与铲除块a3相连接,所述扣块a1为弧形结构的硅胶材质块状物,具有一定韧性,受力可进行形变,所述衔接架a2呈侧向八字状态,所述铲除块a3呈三角状态的块状物,设有两个,且呈对称设置,所述铲除块a3的角状结构便于产生刚好的铲刮效果,由衔接架a2与扣块a1相互配合,辅助铲除块a3与外物相抵触后能及时被缓冲触压力,令铲除块a3随带动柱51的活动而灵活变动,不阻碍带动柱51的滑移同时存在铲刮作用力。
30.本实施例的具体使用方式与作用:人员通过对启动设备,对控电台1进行操控,令驱转箱2受控被驱动,驱转箱2与传动架3的传动配合,令转柱42自转且转速可进行调节,使板带43在转柱42的旋转下被拉紧或松放,驱使带动柱51在板带43的牵引下,可沿着位移轨44进行位移活动,由感应机52对物体具有感知性质,在带动柱51的配合下便于驱带机器人
夹爪54对物体进行抓夹、换位等作业,使抓取装置5在控制下做到自动化,代替工业作业上人员传统的手工操作流程,通过带动柱51在受板带43牵引,而在通道443中往复滑移,带动柱51外端面不断与铲刮装置442产生接触,两者产生间隙配合,衔接架a2在铲除块a3后方,辅助铲除块a3随受到的挤压力不同而产生位置变换,扣块a1的韧性形变进一步配合衔接架a2有更大的活动力,令铲除块a3触接于带动柱51外侧面后,触压力被及时减缓,避免对带动柱51在滑移过程中造成阻碍,同时角状的铲除块a3与带动柱51接触着,在带动柱51移行下能对其外侧产生一定的抵力作为铲刮作用力,便于将其外侧被磨损而出现的废屑物铲下,及时做清理,能让带动柱51外侧维持光滑度,从而避免抓取装置5在被控制下做自动化作业时,因带动柱51外有磨损生锈物的存在,而出现滑移不顺畅的现象。
31.实施例2:如附图6至附图7所示:其中,所述衔接架a2设有弧架a21、摆折杆a22、弹簧钢a23、扯块a24、实块a25,所述弧架a21两端与实块a25铰接连接,所述摆折杆a22一端与实块a25铰接连接,所述弹簧钢a23滑动配合在摆折杆a22之间,所述扯块a24连接在摆折杆a22末端之间,所述弧架a21呈弧状结构,且具有伸缩性,所述摆折杆a22可进行支点式摆折,所述扯块a24为顺丁橡胶材质块状物,具有较好的牵扯性,所述摆折杆a22在弹簧钢a23和扯块a24的配合下,间距可变化,便于摆折杆a22整体的倾斜度变动,施加给弧架a21的力不同,利于衔接架a2整体随受力不同而产生活动,为铲除块a3提供位置变化的效果力。
32.其中,所述铲除块a3设有实角块a31、落口a32、兜块a33,所述落口a32与实角块a31为一体化结构且相贯通,所述兜块a33位于落口a32后方,所述实角块a31呈三角结构,所述落口a32在实角块a31边缘端呈下陷的弧向凹槽状,所述兜块a33为厚度较小的橡胶片块结构,具有弹性,且与落口a32之间的间距为空腔状态,空间大小可变动,所述实角块a31的角状结构便于其与带动柱51相触接时,对其产生铲刮作用,铲下的物质经由落口a32落向兜块a33,兜块a33的韧性令其与落口a32之间的间距大小可变动,便于铲下的物质进行收集。
33.其中,所述弧架a21与扣块a1相穿接且活动配合,所述摆折杆a22与铲除块a3相连接,所述弧架a21的弧状结构与扣块a1的弧状结构相扣合,所述摆折杆a22在铲除块a3侧边上可进行滑动,令摆折杆a22间距变动,所述弧架a21与扣块a1的配合更好的产生一定幅度的弹性活动,进一步带动摆折杆a22活动,令摆折杆a22在活动中更好的承接铲除块a3所受的触压力。
34.其中,所述摆折杆a22与实角块a31侧边滑动连接,所述扯块a24与实角块a31间隙配合,所述实角块a31的角状结构随受力不同而能进行小幅度角度翻转,所述摆折杆a22与实角块a31的连接起到承接力的作用,及时缓冲铲除块a3外侧端受到的触压力。
35.本实施例的具体使用方式与作用:通过弧架a21的弧状结构及其可伸缩性质,其辅助带动摆折杆a22有位置变动,令摆折杆a22撑在实角块a31侧边,使实角块a31对带动柱51相抵时产生的铲刮效果更佳,扯块a24的牵扯性与弹簧钢a23的弹性相配合,令摆折杆a22之间的间距可不断变动,便于摆折杆a22整体的倾斜度变动,灵活承接实角块a31向后传导的力,其倾度变化,施加给弧架a21的力也不同,利于衔接架a2整体随受力不同而产生不同的带动力,作为铲除块a3位置变化的效果力,由实角块a31抵在带动柱51外侧后,可随力的变化而有所翻摆,带动柱51外的废屑物被铲刮下,经由落口a32得以被收集,兜块a33的韧性使
其随收纳物质量的多少而可以改变与落口a32间的空间大小,从而令铲除块a3在做铲刮作业后也能对铲下的物质进行收集。
36.利用本发明所述技术方案,或本领域的技术人员在本发明技术方案的启发下,设计出类似的技术方案,而达到上述技术效果的,均是落入本发明的保护范围。