固定工具
1.分案申请声明
2.本技术是2017年12月04日提交的、申请号为201711261048.8、发明名称为“固定工具”的中国发明专利申请的分案申请。
3.相关申请相互参考
4.本技术是2016年12月2日提交的、序列号为62/429174的、标题为“torque holding wrench(扭矩固定扳手)”的美国临时专利申请的继续申请并主张其权益,其内容通过引用的方式整体并入本技术。
技术领域
5.本发明涉及扭矩应用工具。更具体地,本发明涉及一种在向工件的第二部分施加扭矩的同时用于固定工件的一部分的工具。
背景技术:
6.在许多工业应用中,使用螺纹紧固件将物体拧紧到特定的程度或扭矩是非常重要的。例如,在汽车或飞机的组装中,将螺母、螺栓、螺钉、凸耳等(为了简洁起见,它们全部都被称为“紧固件”)充分拧紧以确保生成的装配功能不仅在初次使用时,而且在长期都是正常的是十分重要的。然而,过度拧紧可能会使螺纹受损或在组件中引起振动问题。
7.此外,当例如,使用扭矩扳手来安装连接件、联接件或配件时,维持被连接的物体,例如在特定位置处的液压软管的各部分是有用的。这确保了液压软管/管道的运行所需的合适定位,并减少了施加到软管、联接件或配件上的扭力。这种扭力会造成对软管/管道的损害,并降低联接件或配件的使用寿命。例如,大约七(7)度的扭曲会使软管使用寿命减少高达约90%。
技术实现要素:
8.本发明广泛地包括诸如固定工具之类的工具,其可以与诸如扭矩扳手之类的扭矩应用工具一起使用。固定工具用于将被紧固的物体,例如,液压软管,的第一部分保持在静止位置,同时扭矩应用工具在物体的第二部分施加扭矩并且使物体的第二部分旋转。固定工具有助于防止将扭矩施加到物体的第一部分,从而防止软管、管道和/或联接件的扭转。
9.在一个实施例中,在使用中,固定工具还与控制器无线通信。例如,工具可能表明其正在使用中。工具与控制器通信,以响应使用者在工具所接合的联接件方向上对工具施加推力或力。该推力释放开关上的压力,该开关启动诸如编码的无线电信号之类的通信信号,以便与控制器通信。这使得控制器能够监控固定工具是否与扭矩应用工具结合使用。
附图说明
10.为了便于理解寻求保护的主题,在附图中示出了其实施例,通过审阅在附图中示出的实施例,并结合下面的描述,将更容易理解和领会寻求保护的主题的构造、操作,及它
的其许多优点。
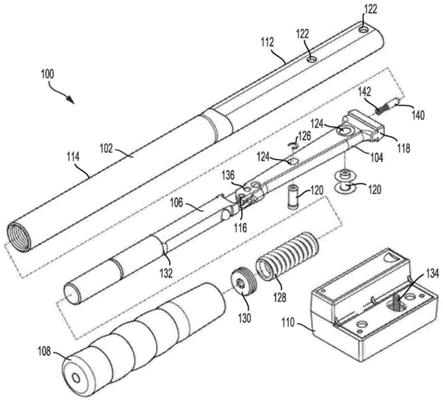
11.图1是根据本发明的实施例的固定工具的分解透视图;
12.图2是根据本发明的实施例的固定工具的第一侧视图;
13.图3是图2所示的固定工具的第二侧视图;
14.图4是根据本发明的实施例的开口式工具头的第一侧视图;
15.图5是图4所示的工具头的第二侧视图;
16.图6是根据本发明的实施例的棘轮开口式工具头的第一侧视图;
17.图7是图6所示的工具头的第二侧视图;
18.图8是根据本发明的实施例的梅花式工具头的第一侧视图;
19.图9是图8所示的工具头的第二侧视图;
20.图10是根据本发明的实施例的扩口螺母式工具头的第一侧视图;
21.图11是图10所示的工具头的第二侧视图;
22.图12是根据本发明的实施例的方形驱动棘轮式工具头的侧视图;
23.图13是根据本发明的实施例的方形驱动式工具头的侧视图;
24.图14是根据本发明的实施例的六角形驱动式工具头的侧视图;
25.图15是根据本发明的实施例的示例性网络图;
26.图16是从概念上说明根据本发明的实施例的固定工具的电子部件的示例的框图;
27.图17是根据本发明的实施例的方法的流程图。
具体实施方式
28.尽管本发明容许有许多不同形式的实施例,但是在附图中展示了本发明的一些实施例,并且将对这些实施例进行详细描述,这些实施例包括优选实施例,应该理解的是,本文公开的内容应当被认为是本发明的原理的示例,而并不是要将本发明的广义方面限制为本文说明的任何一个或多个实施例。本文所使用的术语“本发明”并不打算限制所主张的发明的范围,而仅是为了解释的目的而用于讨论本发明的示例性实施例。
29.本发明广泛地包括诸如固定工具之类的工具,当连接具有第一部分和第二部分的物体时,其可以与诸如扭矩扳手之类的扭矩应用工具一起使用。物体的第一部分可能是不需要旋转的软管或其他装置。物体的第二部分可以是不需要扭矩应用和旋转的联接件。例如,物体可能是液压制动软管,其包括作为第一部分的软管和作为第二部分的可旋转联接件。因此,在一个实施例中,本发明允许向物体的第二部分施加扭矩,并因此导致第二部分旋转,同时物体的第一部分保持静止。
30.当向第二部分施加扭矩时,固定工具有助于防止软管、管道和/或物体的第一部分的扭转。在一个实施例中,在工具的使用中,固定工具还与控制器无线通信。例如,工具可能表明其正在使用中。工具与控制器通信,以响应使用者在工具所接合的联接件的方向上对工具施加推力或力。该推力释放在开关上的压力,该开关启动诸如编码的无线电信号之类的通信信号,以便与控制器通信。这使得控制器能够监控固定工具是否与扭矩应用工具结合使用。
31.例如,控制器可以用于监控在扭矩操作期间固定工具与联接件的接合,监控固定工具完全接合直到达到目标扭矩值之后(如通过与控制器通信的扭矩扳手所表明的),以及
监控已经达到目标扭矩值或目标扭矩和角度值(如通过与控制器通信的扭矩扳手所表明的)。如果不满足上述条件,则控制器可能会指出操作未被正确执行,应重新完成。
32.参考图1至图3,工具100,例如固定工具,包括壳体102、换能器杆104、扭矩块106、手柄108和接口模块110。壳体102包括靠近第一端的第一壳体部分112和靠近第二端的第二壳体部分114。第一壳体部分112是中空的并且适于接收换能器杆104。类似地,第二壳体部分114是中空的并且适于接收扭矩块106。如图所示,第一壳体部分112具有椭圆形的横截面形状,第二壳体部分114具有圆形的横截面形状。然而,第一壳体部分112和第二壳体部分114可以具有其他几何图形的横截面形状。
33.换能器杆104和扭矩块106经由例如一个或多个紧固件或销116连接在一起,并且放置在壳体102中,其中换能器杆104的头部118定位在壳体102外部靠近壳体102的第一端的位置。换能器杆104通过销120连接到壳体102。销120分别延伸穿过壳体102中的孔122和换能器杆104中的孔124。也可以使用一个或多个相应的保持环126将销120固定就位。
34.弹簧128设置在壳体102中并且围绕扭矩块106,手柄108设置在并连接到壳体102的第二端。可以在弹簧128与手柄108的内端之间设置一个或多个垫片,例如垫圈130。扭矩块106还可以包括形成为凸台的止动件132,该止动件132防止弹簧128沿着朝向换能器杆104的方向行进。弹簧128可抵接止动件132和垫圈130。弹簧128向扭矩块106以及换能器杆104提供沿头部118的方向的偏置力。这导致头部118从壳体102的第一端部延伸。
35.接口模块110可以包括开关134,并且接口模块可以被连接到壳体102,并延伸穿过扭矩块106中的孔136和换能器杆104。如图所示,换能器杆104中的孔124具有椭圆形的形状。这使得扭矩块106和换能器杆104能够在壳体102内移动。如上所述,弹簧128向扭矩块106以及换能器杆104提供沿头部118的方向的偏置力。这也将开关134偏置到off位置。当在朝向手柄108的方向上对头部118施加力时(或者在朝向头部118的方向上(如箭头144所示)向手柄108施加力时),孔124的椭圆形的形状使得换能器杆104和扭矩块106能够克服弹簧128的偏置力沿朝向手柄108的方向移动。该移动释放施加到开关134的偏置力,并且使得开关134能够移动到on位置。在on位置,接口模块110发送表明工具100正在使用中的信号,并且接口模块110的指示器138被激活。指示器138可能是灯,其可以发光以向使用者表明工具100正在使用中并且信号正在被发送。类似于使用螺丝刀那样使用推力来激活工具100。这有助于使使用者/操作者将注意力集中于将软管/管道,或联接件保持在静止位置,同时利用单独的扭矩应用工具执行扭矩转操作。例如,工具100可能用于将物体的第一部分保持在静止位置,同时扭矩应用工具用于向物体的第二部分施加扭矩。工具100也可以用于将第一联接件保持在静止位置,同时扭矩应用工具用于向第二联接件施加扭矩。
36.工具100的头部118适于容纳并连接到各种不同的可更换的工具头。例如,头部118可以被成形并适于接合可更换工具头部的相应的阴连接。头部118还可以包括设置在头部118中并连接到头部118的销140和弹簧142。例如,销140和弹簧142可以设置在头部118中的盲孔中,并且通过弹簧142将销140向外偏置。头部118和工具头部的可更换特性使得工具100能够适于接合各种不同类型的配件和紧固件。图4至图14中示出了可以连接到头部118的工具头的示例。
37.参照图4和图5,其中示出了工具头200。工具头200是开口式扳手头,其包括分别适于接合头部118和销140的通道202和通道204。为了将工具头200连接到头部,销140可以被
向内推动以抵抗弹簧142的偏压,并且头部118滑入通道202中直到销140被弹簧142推入通道204中。
38.参照图6和图7,其中示出了工具头300。工具头300是棘轮开口式扳手头,其包括分别适于接合头部118和销140的通道302和通道304。图8和图9示出了梅花型扳手头部400,其包括分别适于接合头部118和销140的通道402和通道404。图10和图11示出了扩口头式扳手头500,其包括分别适于接合头部118和销140的通道502和通道504。图12示出了方形驱动棘轮式扳手头600,其包括分别适于接合头部118和销140的通道602和通道604。图13示出了方形驱动式扳手头700,其包括分别适于接合头部118和销140的通道702和通道704。类似地,图14示出六角驱动式扳手头800,其包括分别适于接合头部118和销140的通道802和通道804。应该理解的是,任何类型的工具头都可以适于包括分别接合头部118和销140的通道。因此,工具100可以与任何类型的工具头连接以适应特定的需求或应用。
39.参考图15,当接口模块110处于on位置时,工具100上的接口模块110可以与控制器900通信。扭矩扳手1000也可以与控制器900通信。工具100、扭矩扳手1000和控制器900一起使用提供错误减少功能。例如,当拧紧软管/管道或联接件,例如,液压软管、液压联接件连接或需要反向扭矩作用的其他连接时,工具100可用于提供反向扭矩。在使用期间,使用者将工具100与物体待保持静止的第一部分接合,并且将扭矩扳手1000与物体待扭转或旋转的第二部分接合。工具100和扭矩扳手1000都可以与控制器900通信。例如,当向工具100施加推力时,例如当沿着朝向工具100的头部的方向向手臂施加推力时,接口模块110被接通(on)。扭矩扳手1000可以与控制器900通信并且将扭矩和/或角度信息传输至控制器900。
40.控制器900接收来自工具100和扭矩扳手1000的信号并监控拧紧操作。例如,控制器900记录和监控工具100和扭矩扳手1000都同时在运行中,以及记录和监控在扭矩扳手1000被使用前、使用中和使用后后,工具100被接合。在使用前,工具100可以与扭矩扳手1000配对,以帮助控制器900识别被使用的工具100和扭矩扳手1000。通过确保工具100和扭矩扳手1000两者一起使用,控制器900提供错误减少功能以帮助防止软管/管道被扭曲和/或连接未对齐可能导致的返工或故障或保修成本增加。
41.为了促进与控制器900的通信,工具100的接口模块110可以包括各种电子部件。例如,参照图16,接口模块可以包括处理器146、内存/存储器148、收发器150、天线152、电源154、开关134和指示器138。处理器146可以包括用于处理数据和计算机可读指令的中央处理单元(cpu)。处理器146可以使用用于指令和数据的运行时临时存储的内存/存储器148,通过总线156处理器146从内存/存储器148获取指令。内存/存储器148可以包括易失性和/或非易失性随机存取存储器(ram)。虽然图16所示的部件是经由总线156连接,但是这些部件可能通过除了经由总线156连接以外的方式(或者代替的方式)连接到其他部件。
42.内存/存储器148存储指令,这些指令包括用于管理与控制器900的通信的指令。内存/存储器148可以包括一种或多种类型的易失性和/或非易失性固态存储器,例如闪存、只读存储器(rom)、磁阻ram(mram)、相变存储器、随机访问存储器(ram)等。
43.可以由处理器146执行用于操作工具100及其各种部件的指令。计算机指令可以非暂时性方式存储在非易失性内存/存储器148或外部装置中。可选地,除了软件之外或代替软件,可执行指令中的一部分或全部可以被嵌入在硬件或固件中。
44.工具100可以包括多个输入和输出接口。这些接口包括收发器150、开关134和指示
器138。工具100还可以包括扬声器或音频换能器158,和/或附加装置,例如触觉反馈装置、显示器等。这些装置可以在接口模块110被接通(on)时提供指示。
45.由处理器146执行的指令从输入接口,例如开关134,接收数据。根据该数据,处理器146可以确定各种信息,例如工具100正被使用,开关处于on位置,以及可选地,工具100处于使用状态的持续时间。数据和信息可以实时记录或以预定的采样率记录并存储在内存/存储器148中。数据和信息也可以被传送到控制器900以便进一步分析和检查。
46.收发器150可以包括发射器、接收器和相关的编码器、调制器、解调器和解码器。收发器150管理通信链路,经由嵌入在工具100中的一个或多个天线152建立与控制器900的通信链路,并且实现处理器146与控制器900之间的单向或双向通信。通信链路可以是工具100/接口模块110与控制器900之间的直接链路,或者可以是通过一个或多个中间部件,例如经由wi-fi路由器或网状连接的间接链路。
47.工具100/接口模块110还包括给处理器146、总线156和其他电子部件供电的电源154。例如,电源154可以是一个或多个电池。然而,电源154不限于电池,可以使用其他技术,例如一个或多个燃料电池或太阳能电池。
48.控制器900可以是计算机或网络中的其他装置。在一个示例中,如在现有技术中已知的,控制器900包括处理器、通信电路(诸如收发器和天线)、内存、存储器,输入和输出装置(诸如按钮、旋钮等)以及显示屏。控制器900能够与各种工具连接以设置参数、工作任务等。例如,参数或工作可以被输入、传送和分配给工具,同时控制器900向使用者显示所需的工作和工作的进度。当使用者开展任务时,工具和控制器900提供听觉、触觉和视觉引导或进展,以及结果。
49.如在现有技术中已知的,扭矩扳手1000还可以包括处理器、通信电路(例如收发器和天线)、内存、存储器、输入和输出装置(诸如按钮,旋钮等)以及扭矩和/或角度传感器。扭矩传感器可以包括,例如扭矩换能器、应变仪、磁致弹性扭矩传感器和表面声波(saw)传感器中的一个或多个。角度传感器可以包括,例如旋转角度传感器和电子陀螺仪(例如二轴或三轴陀螺仪)中的一个或多个。由处理器执行的指令从传感器接收数据,例如扭矩和角度值。根据该数据,处理器可以确定各种信息,例如已经或应该施加到工件的扭矩的持续时间和量。然后,传感器数据和信息可以实时地或以预定的时间间隔被传送到控制器900。
50.图17是根据本发明的一个方面的过程1700的流程图。固定工具100可以与扭矩扳手,例如扭矩扳手1000配对,如方框1702所示。该配对可以由使用者通过控制器900来执行。
51.然后,工具100可以与待保持在静止位置的联接件(例如联接件的第一部分、第一联接件、连接、配件或软管等)接合,如方框1704所示。工具100的接口模块110被激活(切换到on位置),以响应沿工具100的头部方向施加到工具100的手柄的推力,并且工具100和控制器900之间的通信被激活,如方框1706所示。扭矩扳手1000还可以与待旋转的联接件的第二部分、第二联接件、连接、配件或软管等接合,如方框708所示,并且扭矩扳手1000与控制器900之间的通信900被激活,如方框1710所示。然后可以通过扭矩扳手1000施加适当量的扭矩,如方框1712所示。当施加扭矩时,控制器900可以接收来自工具100的信号,该信号表明工具100正在使用,并且表明扭矩扳手1000的扭矩/角度测量值,如方框1714所示。
52.一旦施加了合适的扭矩,工具100和扭矩扳手1000可以与相应的联接件分离,如方框1716所示。然后,控制器900可以检查所接收的信息以确定在施加合适的扭矩之前、期间
和之后,工具100是否被接合(或处于使用中),如方框1718所示。如果在施加合适的扭矩之前、期间和之后工具100被接合(或处于使用中),则完成任务,如方框1720所示。然而,如果在施加合适的扭矩之前、期间和之后工具100未被接合(或未处于使用中),则控制器900可报错,如方框1722所示,指示应该重做或重新检查任务。通过确保工具100和扭矩扳手1000两者一起被使用,控制器900提供错误减少功能以帮助防止软管/管道扭曲和/或联接件/连接器未对准可能导致的返工或保修成本增加。
53.本文所使用的术语“连接”及其功能等同物不是必然限于两个或更多部件的直接机械连接。相反,术语“连接”及其功能等同物意在表示两个或更多物体、特征、工件和/或环境元素之间的任何直接或间接的机械、电气或化学的连接。在一些实施例中,“连接”也意为一个物体与另一物体集成。
54.上述描述和附图中阐述的事项仅作为说明而不是限制。虽然已经示出和描述了特定的实施例,但是对于本领域技术人员显而易见的是,可以在不脱离发明人的贡献的更广泛的方面的情况下进行改变和修改。当以基于现有技术的适当视角来看待时,所寻求的保护的实际范围以在所附的权利要求书为准。