1.本实用新型涉及人工智能机器人相关技术领域,具体为一种具有避障功能的人工智能机器人。
背景技术:
2.智能机器人之所以叫智能机器人,这是因为它有相当发达的“大脑”,在脑中起作用的是中央处理器,这种计算机跟操作它的人有直接的联系,最主要的是,这样的计算机可以进行按目的安排的动作,有的餐厅会利用人工智能机器人为客人传菜。
3.现有的人工智能机器人在行走的过程中难以及时避障,当该装置意外碰到障碍物时易损坏,使用完该装置之后不便对该装置内部进行干燥除湿处理,针对上述问题,需要对现有的设备进行改进。
技术实现要素:
4.本实用新型的目的在于提供一种具有避障功能的人工智能机器人,以解决上述背景技术中提出的现有的人工智能机器人在行走的过程中难以及时避障,当该装置意外碰到障碍物时易损坏,使用完该装置之后不便对该装置内部进行干燥除湿处理的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种具有避障功能的人工智能机器人,包括移动座、除湿机构、通孔和电池组,
6.所述移动座的外侧固定有红外线探头和橡胶圈,且橡胶圈位于红外线探头的上侧,所述移动座的顶部固定有承载柜,且承载柜的一端面固定有照明灯管和监控探头,且照明灯管位于监控探头的下侧,所述承载柜顶部的一侧固定有控制面板,且承载柜的内侧固定有托盘,同时托盘的一端面固定有指示灯;
7.所述除湿机构固定在承载柜顶部的另一侧,且除湿机构贯穿承载柜的前端面与托盘相连接。
8.通过采用上述技术方案,将菜品放置在托盘上之后,承载柜可随着移动座一起移动,方便为顾客传菜,搭配使用红外线探头和监控探头可实现避障的效果,当该装置意外撞上障碍物时,橡胶圈可减轻移动座与障碍物之间的碰撞,搭配使用热风机、输风通道和喷风通道可对空置的托盘进行风干处理,残留在托盘的水分可集中流到收集盒内,方便集中处理。
9.优选的,所述橡胶圈设置有两个。
10.通过采用上述技术方案,当移动座意外撞到障碍物时,橡胶圈可起到减轻碰撞的作用。
11.优选的,所述除湿机构包括热风机、输风通道和喷风通道,且热风机固定在承载柜的顶部,所述热风机的前侧固定有输风通道,且输风通道贯穿承载柜的前侧壁与喷风通道相连接,同时喷风通道固定在托盘的下端面上。
12.通过采用上述技术方案,取走所有托盘上的菜品之后,热风机制造热风,热风先后
经过输风通道和喷风通道喷出,方便对托盘进行风干处理。
13.优选的,所述通孔开设在承载柜的后侧壁上,且通孔位于托盘一端的上侧,所述通孔与合流通道相贯通,且合流通道固定在承载柜的后侧,所述合流通道的底部与收集盒相贯通,且收集盒放置在移动座上,同时收集盒位于承载柜的内侧。
14.通过采用上述技术方案,利用除湿机构风干托盘的过程中,残留在托盘上的水分先后经过通孔和合流通道流到收集盒内,方便集中收集处理。
15.优选的,所述电池组设置在移动座的内部,且电池组电性连接有红外线探头、照明灯管、监控探头、控制面板、指示灯和热风机。
16.通过采用上述技术方案,电池组可为整个装置供电,以此保证该装置的正常使用。
17.与现有技术相比,本实用新型的有益效果是:该具有避障功能的人工智能机器人,
18.(1)该装置是用来传菜的,将菜品放置在托盘上后,承载柜随着移动座一起移动至所需地点,方便自动传菜,搭配使用红外线探头和监控探头可实现避障的效果,当该装置意外撞上障碍物时,橡胶圈可减轻移动座与障碍物之间的碰撞,方便达到防护的效果,当该装置到达顾客桌边时,顾客可取下亮起指示灯对应托盘上的菜品;
19.(2)取走所有托盘上的菜品之后,喷风通道向下喷出热风,方便对托盘进行风干处理,以便除去托盘上的水分,托盘上的水分可穿过通孔进入合流通道内并最终流到收集盒,方便集中收集处理。
附图说明
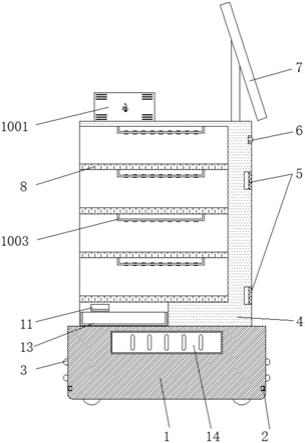
20.图1为本实用新型正视剖面结构示意图;
21.图2为本实用新型正视外观结构示意图;
22.图3为本实用新型左视剖面结构示意图;
23.图4为本实用新型左视外观结构示意图。
24.图中:1、移动座,2、红外线探头,3、橡胶圈,4、承载柜,5、照明灯管,6、监控探头,7、控制面板,8、托盘,9、指示灯,10、除湿机构,1001、热风机,1002、输风通道,1003、喷风通道,11、通孔,12、合流通道,13、收集盒,14、电池组。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
26.请参阅图1-4,本实用新型提供一种技术方案:一种具有避障功能的人工智能机器人,根据图1和图2所示,移动座1的外侧固定有红外线探头2和橡胶圈3,且橡胶圈3位于红外线探头2的上侧,橡胶圈3设置有两个,当移动座1意外撞上障碍物时,橡胶圈3可减轻移动座1与障碍物之间的碰撞,方便达到防护的效果,同时使用两个橡胶圈3可使防护效果更好,移动座1的顶部固定有承载柜4,且承载柜4的一端面固定有照明灯管5和监控探头6,且照明灯管5位于监控探头6的下侧,承载柜4顶部的一侧固定有控制面板7,且承载柜4的内侧固定有托盘8,同时托盘8的一端面固定有指示灯9。
27.根据图1、图2和图3所示,除湿机构10固定在承载柜4顶部的另一侧,且除湿机构10贯穿承载柜4的前端面与托盘8相连接,除湿机构10包括热风机1001、输风通道1002和喷风通道1003,且热风机1001固定在承载柜4的顶部,热风机1001的前侧固定有输风通道1002,且输风通道1002贯穿承载柜4的前侧壁与喷风通道1003相连接,同时喷风通道1003固定在托盘8的下端面上,取走所有托盘8上的菜品之后,热风机1001制造热风,热风先后经过输风通道1002和喷风通道1003喷出,方便对托盘8进行风干处理,以便达到除湿的效果,通孔11开设在承载柜4的后侧壁上,且通孔11位于托盘8一端的上侧,通孔11与合流通道12相贯通,且合流通道12固定在承载柜4的后侧,合流通道12的底部与收集盒13相贯通,且收集盒13放置在移动座1上,同时收集盒13位于承载柜4的内侧,利用除湿机构10对托盘8进行风干处理的过程中,残留在托盘8上的水分可穿过通孔11进入合流通道12内并集中流到收集盒13内,方便集中收集处理,电池组14设置在移动座1的内部,且电池组14电性连接有红外线探头2、照明灯管5、监控探头6、控制面板7、指示灯9和热风机1001,电池组14可在逆变器的作用下将直流电变为交流电供整个装置使用,以此保证该装置的正常使用。
28.工作原理:在使用该具有避障功能的人工智能机器人时,电池组14在逆变器的作用下将直流电变为交流电供整个装置使用,通过操作控制面板7来控制整个装置的运作,照明灯管5可发挥照明的作用,将菜品放置在托盘8上后,承载柜4随着移动座1一起移动,方便自动传菜,搭配使用红外线探头2和监控探头6可实现避障的效果,当该装置意外撞上障碍物时,橡胶圈3可减轻移动座1与障碍物之间的碰撞,当该装置到达顾客桌边时,顾客可取下亮起指示灯9对应托盘8上的菜品,取走所有托盘8上的菜品之后,启动热风机1001,热风机1001制造热风,热风先后经过输风通道1002和喷风通道1003喷出,以此对托盘8进行风干处理,残留在托盘8上的水分穿过通孔11进入合流通道12内并集中流到收集盒13内,取出收集盒13后可处理掉其中的水分,这就完成整个工作,且本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
29.术语“中心”、“纵向”、“横向”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为便于描述本实用新型的简化描述,而不是指示或暗指所指的装置或元件必须具有特定的方位、为特定的方位构造和操作,因而不能理解为对本实用新型保护内容的限制。
30.尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。