1.本实用新型属于医疗器械技术领域,具体涉及帕金森冻结步态康复手扶椅。
背景技术:
2.帕金森是一种常见于中老年人的神经系统变性疾病,一般伴有运动症状和非运动症状。其中运动症状包括静止性震颤、肌强直、运动迟缓和姿势平衡障碍。在疾病早期表现为走路时患侧上肢摆臂幅度减小或消失,下肢拖曳。随病情进展,步伐逐渐变小变慢,启动、转弯时步态障碍尤为明显,自坐位、卧位起立时困难,有时行走中全身僵住,不能动弹,称为冻结现象。
3.现有技术中的帕金森病患者需要在医护人员辅助提示下将患者的脚抬起,这需要医护人员花费较大的精力,为医护人员带来麻烦;中国发明专利申请cn111184623a提供一种用于帕金森病患者步态训练装置,结构复杂,占用空间大,且在康复训练时需要及时接通电源,使用受限。
技术实现要素:
4.本实用新型要解决的技术问题是:针对上述缺陷,本实用新型提供一种帕金森冻结步态康复手扶椅,患者能够在任何平整场地进行训练,结构简单,使用时稳定性好。
5.本实用新型解决其技术问题采用的技术方案如下:帕金森冻结步态康复手扶椅,包括椅框、设置在椅框的上扶手;所述椅框包括第一支脚、第二支脚、第三支脚、第四支脚、连接第一支脚和第二支脚的第一z型连接件、连接第三支脚和第四支脚的第二z型连接件、连接第一支脚和第三支脚的横梁;所述扶手包括设置在第一z型连接件的水平杆上的第一扶套、第二扶套以及设置在第二z型连接件的水平杆上的第三扶套和第四扶套;
6.所述第一支脚下方设有第一压力传感器、且所述第一支脚外部套设有第一护套,所述第二支脚下方设有第二压力传感器、且所述第二支脚外部套设有第二护套,所述第三支脚下方设有第三压力传感器、且所述第三支脚外部套设有第三护套,所述第四支脚下方设有第四压力传感器、且所述第四支脚外部套设有第四护套;所述第一压力传感器、第二压力传感器、第三压力传感器和第四传感器串联后与控制器电连接;
7.所述横梁上设有语音播报装置和激光发射器,所述语音播报装置和激光发射器与控制器电连接;所述激光发射器通过角度调整装置与横梁连接,所述激光发射器前端设有透镜组。
8.该手扶椅通过有四个支脚和两个z型连接件组成的椅框作为冻结步态患者的支撑结构,结构小巧且稳定,患者在康复训练时不受场地影响;四个支脚分别设置串联连接的四个压力传感器,只有当四个支脚都与地面接触受到压力时,与控制器控制的语音播报装置会进行播报提示,及时在患者卡顿时进行语言提醒,并通过可调节角度的激光发射器在视线前端的地面形成划线作为参照物,结构简单,使用便捷,且患者使用时稳定性好。
9.进一步的,所述角度调整装置上设有角度传感器,所述角度传感器与控制器电连
接。引入的角度传感器,可以与控制器进行相应的逻辑运算,调整激光发射器在地面上的距离,距离可控,便于推定。
10.进一步的,所述第一支脚和第二支脚中部采用第一u形管固定,所述第三支脚和第四支脚中部采用第二u形管固定。引入两个u形管可以进一步提高该手扶椅的稳定性和支撑强度,使用时安全性好。
11.进一步的,所述第一支脚包括带有若干第一调节孔的第一套管和设置在第一套管上方第一调节杆,所述第二支脚包括带有若干第二调节孔的第二套管和设置在第二套管上方的第二调节杆,所述第一u形管相对的内表面分别设有第一伸缩块和第二伸缩块,所述第一伸缩块与若干第一调节孔中的一个对应,所述第二伸缩块与若干第二调节孔中的一个对应;
12.所述第三支脚包括带有若干第三调节孔的第三套管和设置在第三套管上方的第三调节杆,所述第四支脚包括带有若干第四调节孔的第四套管和设置在第四套管上方的第四调节杆,所述第二u形管相对的内表面分别设有第三伸缩块和第四伸缩块,所述第三伸缩块与若干第三调节孔中的一个对应,所述第四伸缩块与若干第四调节孔中的一个对应。引入的伸缩块和调节孔,便于手扶椅高度的调整,满足不同帕金森冻结步态患者的使用需求,应用范围广,使用舒适度高。
13.更进一步的,所述第一u形管连接第一调节杆和第二调节杆、且与第一调节杆和第二调节杆一体成型;所述第二u形管连接第三调节杆和第四调节杆、且与第三调节杆和第四调节杆一体成型。一体成型可以确保u形管与对应的调节杆之间的强度,受力强度高。
14.进一步的,所述横梁为h形结构。h形结构的横梁,可以进一步的提高该手扶椅的稳定性和支撑强度,使用时安全性好。
15.进一步的,所述第一z型连接件和第二z型连接件之间设有连接杆,所述控制器固定在连接杆上。引入的连接杆并将控制器固定在其上方,降低患者在康复训练时误碰控制器的可能。
16.更进一步的,所述第二调节杆和第四调节杆上分别设有相互配合的锁件和扣件。引入的锁件和扣件,可以有效限定其在手扶椅内活动范围,防止患者向后倾倒,使用便捷。
17.本实用新型的有益效果是:
18.1、该手扶椅通过有四个支脚和两个z型连接件组成的椅框作为冻结步态患者的支撑结构,结构小巧且稳定,患者在康复训练时不受场地影响;四个支脚分别设置串联连接的四个压力传感器,只有当四个支脚都与地面接触受到压力时,与控制器控制的语音播报装置会进行播报提示,及时在患者卡顿时进行语言提醒,并通过可调节角度的激光发射器在视线前端的地面形成划线作为参照物,结构简单,使用便捷,且患者使用时稳定性好。
19.2、引入的角度传感器,可以与控制器进行相应的逻辑运算,调整激光发射器在地面上的距离,距离可控,便于推定;引入两个u形管可以进一步提高该手扶椅的稳定性和支撑强度,使用时安全性好;引入的伸缩块和调节孔,便于手扶椅高度的调整,满足不同帕金森冻结步态患者的使用需求,应用范围广,使用舒适度高;一体成型可以确保u形管与对应的调节杆之间的强度,受力强度高;h形结构的横梁,可以进一步的提高该手扶椅的稳定性和支撑强度,使用时安全性好;引入的连接杆并将控制器固定在其上方,降低患者在康复训练时误碰控制器的可能;引入的锁件和扣件,可以有效限定其在手扶椅内活动范围,防止患
者向后倾倒,使用便捷。
附图说明
20.通过下面结合附图的详细描述,本实用新型前述的和其他的目的、特征和优点将变得显而易见。
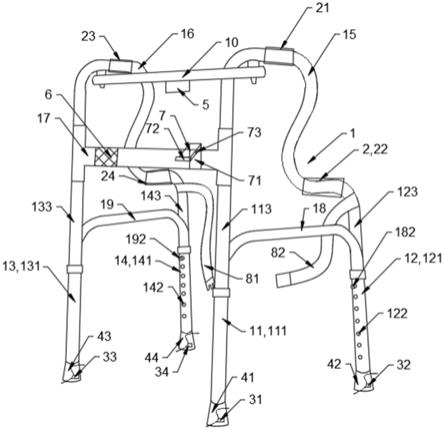
21.图1为本实用新型结构示意图;
22.图2为本实用新新型椅框另一角度部分结构示意图;
23.其中:1为椅框,11为第一支脚,111为第一套管,112为第一调节孔,113为第一调节杆,12为第二支脚,121为第二套管,122为第二调节孔,123为第二调节杆,13为第三支脚,131为第三套管,132为第三调节孔,133为第三调节杆,14为第四支脚,141为第四套管,142为第四调节孔,143为第四调节杆,15为第一z型连接件,16为第二z型连接件,17为横梁,18为第一u形管,181为第一伸缩块,182为第二伸缩块,19为第二u形管,191为第三伸缩块,192为第四伸缩块,10为连接杆,2为扶手,21为第一扶套,22为第二扶套,23为第三扶套,24为第四扶套,31为第一压力传感器,32为第二压力传感器,33为第三压力传感器,34为第四压力传感器,41为第一护套,42为第二护套,43为第三护套,44为第四护套,5为控制器,6为语音播报装置,7为激光发射器,71为角度调整装置,72为透镜组,73为角度传感器,81为锁件,82为扣件。
具体实施方式
24.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
25.参照图1、图2,帕金森冻结步态康复手扶椅包括椅框1、设置在椅框1的上扶手2;所述椅框1包括第一支脚11、第二支脚12、第三支脚13、第四支脚14、连接第一支脚11和第二支脚12的第一z型连接件15、连接第三支脚13和第四支脚14的第二z型连接件16、连接第一支脚11和第三支脚13的横梁17,所述横梁17为h形结构;所述扶手2包括设置在第一z型连接件15的水平杆上的第一扶套21、第二扶套22以及设置在第二z型连接件16的水平杆上的第三扶套23和第四扶套24;
26.所述第一支脚11下方设有第一压力传感器31、且所述第一支脚11外部套设有第一护套41,所述第二支脚12下方设有第二压力传感器32、且所述第二支脚12外部套设有第二护套42,所述第三支脚13下方设有第三压力传感器33、且所述第三支脚13外部套设有第三护套43,所述第四支脚14下方设有第四压力传感器34、且所述第四支脚14外部套设有第四护套44;所述第一压力传感器31、第二压力传感器32、第三压力传感器33和第四传感器串联后与控制器5电连接;
27.所述横梁17上设有语音播报装置6和激光发射器7,所述语音播报装置6和激光发射器7与控制器5电连接;所述激光发射器7通过角度调整装置71与横梁17连接,所述激光发射器7前端设有透镜组72;为了实时知晓调整多少距离,所述角度调整装置71上设有角度传感器73,所述角度传感器73与控制器5电连接。
28.所述第一支脚11和第二支脚12中部采用第一u形管18固定,所述第三支脚13和第
四支脚14中部采用第二u形管19固定;所述第一支脚11包括带有若干第一调节孔112的第一套管111和设置在第一套管111上方第一调节杆113,所述第二支脚12包括带有若干第二调节孔122的第二套管121和设置在第二套管121上方的第二调节杆123,所述第一u形管18相对的内表面分别设有第一伸缩块181和第二伸缩块182,所述第一伸缩块181与若干第一调节孔112中的一个对应,所述第二伸缩块182与若干第二调节孔122中的一个对应;
29.所述第三支脚13包括带有若干第三调节孔132的第三套管131和设置在第三套管131上方的第三调节杆133,所述第四支脚14包括带有若干第四调节孔142的第四套管141和设置在第四套管141上方的第四调节杆143,所述第二u形管19相对的内表面分别设有第三伸缩块191和第四伸缩块192,所述第三伸缩块191与若干第三调节孔132中的一个对应,所述第四伸缩块192与若干第四调节孔142中的一个对应。
30.为了确保该手扶椅的强度,所述第一u形管18连接第一调节杆113和第二调节杆123、且与第一调节杆113和第二调节杆123一体成型;所述第二u形管19连接第三调节杆133和第四调节杆143、且与第三调节杆133和第四调节杆143一体成型。
31.所述第一z型连接件15和第二z型连接件16之间设有连接杆10,所述控制器5固定在连接杆10上。
32.为了防止患者向后倾倒时,所述第二调节杆123和第四调节杆143上分别设有相互配合的锁件81和扣件82,可以有效限定其在手扶椅内活动范围,使用便捷。
33.该手扶椅通过有四个支脚和两个z型连接件组成的椅框作为冻结步态患者的支撑结构,结构小巧且稳定,患者在康复训练时不受场地影响;四个支脚分别设置串联连接的四个压力传感器,只有当四个支脚都与地面接触受到压力时,与控制器控制的语音播报装置会进行播报提示,及时在患者卡顿时进行语言提醒,并通过可调节角度的激光发射器在视线前端的地面形成划线作为参照物,结构简单,使用便捷,且患者使用时稳定性好。
34.以上述依据本实用新型的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项实用新型技术思想的范围内,进行多样的变更以及修改。本项实用新型的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。