1.本发明涉及医疗康复器械技术领域,具体涉及一种帕金森患者康复用步态调节器。
背景技术:
2.帕金森病是一种常见的神经系统变性疾病,在老年人中多见,我国65岁以上人群中,临床上,主要表现为静止性震颤、运动迟缓、肌强直和姿势步态障碍,帕金森病患者行走时常常会越走越快,不易止步,称为慌张步态,于是需要步态康复训练装置来进行康复训练。
3.例如公开号为cn213851864u的中国专利,其中提出了一种帕金森患者步态康复训练装置,该组件可通过固定螺栓,以及安装盘,将立柱安装在安装座上,此时帕金森患者即可在训练台上,手扶扶杆进行步态康复训练,提高了安全性,还便于拆装,比较实用,该帕金森患者步态康复训练装置在工作时,会承受较多的冲击以及震动,此时安装座会受到挤压,此时液压装置、胶块以及弹簧会起到减缓震动以及冲击的作用,从而保护此装置不会损坏,但该训练装置患者在锻炼使用时,此时患者的手臂都是时刻握在手扶扶杆上,从而使患者在康复锻炼时无法像正常行人走路一样晃动手臂。
技术实现要素:
4.针对背景技术中提到的问题,本发明的目的是提供一种帕金森患者康复用步态调节器,以解决背景技术中提到的问题。
5.本发明的上述技术目的是通过以下技术方案得以实现的:一种帕金森患者康复用步态调节器,包括:走步机本体,所述走步机本体的顶面固定连接有两个支撑架,所述走步机本体的顶面设置有座位块;控制槽,所述控制槽固定连接在所述座位块的顶面,所述控制槽的内部固定安装有plc控制器,所述plc控制器与所述走步机本体电性连接;摇摆组件,所述摇摆组件设置在所述支撑架的顶面,用于摇动患者的手臂。
6.通过采用上述技术方案,通过设置摇摆组件,摇摆组件可以对患者的手臂进行摇摆,从而调整患者走路的状态。
7.较佳的,所述摇摆组件包括:限位块,所述限位块设置在所述支撑架的顶面,所述限位块的一侧开设有固定孔,所述固定孔的内部活动套设有连接块;连接孔,所述连接孔开设在所述连接块的一侧,所述连接孔的内部固定是连接有三节电动推杆,所述三节电动推杆与所述plc控制器电性连接,所述三节电动推杆伸缩轴的一端固定连接有把手;调节件,所述调节件设置在所述支撑架的内部,用于调节所述限位块的位置;固定件,所述固定件设置在所述限位块的顶面,用于对所述连接块进行固定。
8.通过采用上述技术方案,通过设置固定件,固定件可以将连接块固定在固定孔的内部,进而便于后期调节连接块的位置。
9.较佳的,所述调节件包括:电动液压推杆,所述电动液压推杆固定连接在所述支撑架的内部,所述电动液压推杆与所述plc控制器电性连接,所述支撑架的顶面开设有伸缩孔,所述电动液压推杆的伸缩轴与所述伸缩孔活动套设在一起,所述电动液压推杆伸缩轴的顶端穿过所述伸缩孔与所述限位块的底面固定连接在一起,所述限位块通过所述电动液压推杆设置在所述支撑架的顶面。
10.通过采用上述技术方案,通过设置调节件,调节件可以调节限位块的位置,从而便于不同身高的患者使用时。
11.较佳的,所述调节组件包括:两个螺纹孔,两个所述螺纹孔的内部螺纹连接有所述螺栓,所述连接块的顶端开设有若干个螺纹槽,所述螺纹槽与所述螺纹孔的位置相对应,所述螺栓的底端穿过所述螺纹孔与所述螺纹槽螺纹连接。
12.通过采用上述技术方案,通过设置螺栓,通过工作人员将连接块在固定孔内部调节位置后,再将螺栓通过螺纹孔与螺纹槽螺纹连接在一起,此时连接块可以固定在固定孔的内部,便于工作人员调节两个把手之间的间距。
13.较佳的,所述把手的外圆壁面固定连接有松紧带,所述把手的一端固定连接有防护板。
14.通过采用上述技术方案,通过设置电动液压推杆,通过电动液压推杆的伸缩轴带动限位块上下移动,从而便于后期调节把手的高度,通过设置螺栓,通过工作人员将连接块在固定孔内部调节位置后,再将螺栓通过螺纹孔与螺纹槽螺纹连接在一起,此时连接块可以固定在固定孔的内部,便于工作人员调节两个把手之间的间距,从而使不同身高和体型的患者均可以在走步机本体上进行锻炼。
15.较佳的,所述连接块的顶面开设有配重槽。
16.通过采用上述技术方案,通过设置配重槽,当连接块在固定孔内部调节位置后,通过工作人员往配重槽内部放置配重块,可以平衡连接块左右两端的重量,使连接块的重心始终保持在固定孔的内部。
17.较佳的,所述走步机本体的顶面固定连接有若干个固定棒,所述固定棒的内部设置有支撑组件,用于对所述座位块进行支撑。
18.通过采用上述技术方案,通过设置支撑组件,支撑组件可以使座位块固定在走步机本体的顶面。
19.较佳的,所述支撑组件包括:弹簧,所述弹簧固定连接在所述固定棒内部的底面,所述固定棒的内部活动安装有限位板,所述限位板的底端与所述弹簧的顶端固定连接;挤压孔,所述挤压孔开设在所述固定棒的顶端,所述限位板的顶端固定连接有连接棒,所述连接棒与所述挤压孔活动套设在一起,所述连接棒的顶端穿过所述挤压孔与所述座位块的底面固定连接在一起,所述座位块通过所述连接棒设置在所述走步机本体的顶面。
20.通过采用上述技术方案,通过设置座位块,当患者在走步机本体上长时间锻炼后,患者可以直接坐在座位块上休息,方便患者休息,通过设置弹簧,弹簧可以减缓患者坐在座位块的下降速度,有效的防止在患者突然坐在座位块产生的重力传递到走步机本体的顶面,长时间对走步机本体造成损伤。
21.较佳的,所述座位块的顶面开设有放置槽,所述放置槽的内部活动套设有连接板,所述连接板的顶面固定连接有坐垫。
22.通过采用上述技术方案,通过设置坐垫,坐垫可以增加患者坐时的舒适度。
23.较佳的,所述走步机本体的顶面固定连接有支撑棒,所述支撑棒的顶端活动安装有投影灯。
24.通过采用上述技术方案,通过设置投影灯,通过工作人员将投影灯内部的画面脚印照射在走步机本体的顶面,此时患者可以根据投影灯照射的画面在走步机本体行走,通过工作人员提前设定投影画面脚印之间的间距,从而使患者可以根据投影脚印的间距进行行走,来调节患者走路时脚步之间的间距。
25.综上所述,本发明主要具有以下有益效果:通过设置走步机本体,倘若患者在走步机本体上面行走时,通过设置三节电动推杆,当患者将手抓取在把手上,此时三节电动推杆的伸缩轴可以通过把手带动患者的手臂进行摇动,使患者在走步机本体上行走时手臂可以摇摆,通过松紧带与防护板可以有效的避免了患者手在把手上摇摆滑落。
26.通过设置电动液压推杆,通过电动液压推杆的伸缩轴带动限位块上下移动,从而便于后期调节把手的高度,通过设置螺栓,通过工作人员将连接块在固定孔内部调节位置后,再将螺栓通过螺纹孔与螺纹槽螺纹连接在一起,此时连接块可以固定在固定孔的内部,便于工作人员调节两个把手之间的间距,从而使不同身高和体型的患者均可以在走步机本体上进行锻炼。
27.通过设置投影灯,通过工作人员将投影灯内部的画面脚印照射在走步机本体的顶面,此时患者可以根据投影灯照射的画面在走步机本体行走,通过工作人员提前设定投影画面脚印之间的间距,从而使患者可以根据投影脚印的间距进行行走,来调节患者走路时脚步之间的间距。
28.通过设置座位块,当患者在走步机本体上长时间锻炼后,患者可以直接坐在座位块上休息,方便患者休息,通过设置弹簧,弹簧可以减缓患者坐在座位块的下降速度,有效的防止在患者突然坐在座位块产生的重力传递到走步机本体的顶面,长时间对走步机本体造成损伤。
29.通过设置压力传感器,当压力传感器感受到重力后,此时压力传感器可以将信息传输至plc控制器,使plc控制器控制走步机本体和三节电动推杆停止工作,从而使患者将手放置坐垫的顶面后,就可以控制走步机本体和三节电动推杆停止工作,便于患者后期停止锻炼,方便休息。
附图说明
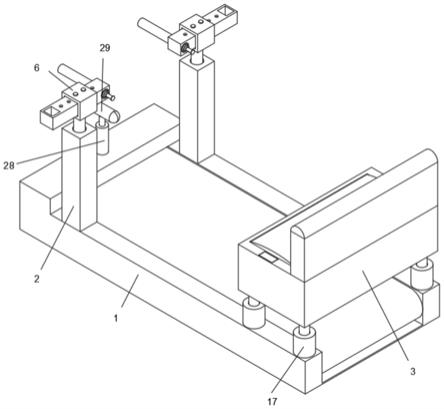
30.图1是本发明的立体结构示意图;图2是本发明的座位块结构示意图;图3是本发明的限位块结构示意图;图4是本发明的支撑架结构示意图;图5是本发明的防护板结构示意图;图6是本发明的固定棒结构示意图;图7图2中a的局部放大结构示意图。
31.附图标记:1、走步机本体;2、支撑架;3、座位块;4、控制槽;5、plc控制器;6、限位
块;7、固定孔;8、连接块;9、连接孔;10、三节电动推杆;11、把手;12、电动液压推杆;13、伸缩孔;14、松紧带;15、防护板;16、配重槽;17、固定棒;18、弹簧;19、限位板;20、挤压孔;21、连接棒;22、放置槽;23、连接板;24、坐垫;25、靠背垫;26、检测槽;27、压力传感器;28、支撑棒;29、投影灯;30、螺纹孔;31、螺栓;32、螺纹槽。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.参考图1、图2和图3,一种帕金森患者康复用步态调节器,包括走步机本体1,走步机本体1的顶面固定连接有两个支撑架2,走步机本体1的顶面设置有座位块3,座位块3的顶面固定连接有控制槽4,控制槽4的内部固定安装有plc控制器5,plc控制器5与走步机本体1电性连接,支撑架2的顶面设置有摇摆组件,用于摇动患者的手臂,摇摆组件包括限位块6,限位块6设置在支撑架2的顶面,限位块6的一侧开设有固定孔7,固定孔7的内部活动套设有连接块8,连接块8的一侧开设有连接孔9,连接孔9的内部固定是连接有三节电动推杆10,三节电动推杆10与plc控制器5电性连接,三节电动推杆10伸缩轴的一端固定连接有把手11,支撑架2的内部设置有调节件,用于调节限位块6的位置,限位块6的顶端设置有固定件,用于对连接块8进行固定,调节组件包括两个螺纹孔30,两个螺纹孔30的内部螺纹连接有螺栓31,连接块8的顶端开设有若干个螺纹槽32,螺纹槽32与螺纹孔30的位置相对应,螺栓31的底端穿过螺纹孔30与螺纹槽32螺纹连接,通过设置走步机本体1,倘若患者在走步机本体1上面行走时,通过设置三节电动推杆10,当患者将手抓取在把手11上,此时三节电动推杆10的伸缩轴可以通过把手11带动患者的手臂进行摇动,使患者在走步机本体1上行走时手臂可以摇摆,通过松紧带14与防护板15可以有效的避免了患者手在把手11上摇摆滑落。
34.参考图2、图4和图5,调节件包括电动液压推杆12,电动液压推杆12固定连接在支撑架2的内部,电动液压推杆12与plc控制器5电性连接,支撑架2的顶面开设有伸缩孔13,电动液压推杆12的伸缩轴与伸缩孔13活动套设在一起,电动液压推杆12伸缩轴的顶端穿过伸缩孔13延伸至支撑架2的外部,电动液压推杆12伸缩轴的顶端穿过伸缩孔13与限位块6的底面固定连接在一起,限位块6通过电动液压推杆12设置在支撑架2的顶面,把手11的外圆壁面固定连接有松紧带14,把手11的一端固定连接有防护板15,连接块8的顶面开设有配重槽16,走步机本体1的顶面固定连接有若干个固定棒17,固定棒17的内部设置有支撑组件,用于对座位块3进行支撑,通过设置电动液压推杆12,通过电动液压推杆12的伸缩轴带动限位块6上下移动,从而便于后期调节把手11的高度,通过设置螺栓31,通过工作人员将连接块8在固定孔7内部调节位置后,再将螺栓31通过螺纹孔30与螺纹槽32螺纹连接在一起,此时连接块8可以固定在固定孔7的内部,便于工作人员调节两个把手11之间的间距,从而使不同身高和体型的患者均可以在走步机本体1上进行锻炼。
35.参考图1和图6,支撑组件包括弹簧18,弹簧18固定连接在固定棒17内部的底面,固定棒17的内部活动安装有限位板19,限位板19的底端与弹簧18的顶端固定连接,固定棒17的顶端开设有挤压孔20,限位板19的顶端固定连接有连接棒21,连接棒21与挤压孔20活动
套设在一起,连接棒21的顶端穿过挤压孔20与座位块3的底面固定连接在一起,座位块3通过连接棒21设置在走步机本体1的顶面,通过设置座位块3,当患者在走步机本体1上长时间锻炼后,患者可以直接坐在座位块3上休息,方便患者休息,通过设置弹簧18,弹簧18可以减缓患者坐在座位块3的下降速度,有效的防止在患者突然坐在座位块3产生的重力传递到走步机本体1的顶面,长时间对走步机本体1造成损伤。
36.参考图1、图2和图7,座位块3的顶面开设有放置槽22,放置槽22的内部活动套设有连接板23,连接板23的顶面固定连接有坐垫24,连接板23的内部设置有停止组件,用于控制走步机本体1停止工作,停止组件包括若干个检测槽26,若干个检测槽26均开设在连接板23内部的底面,检测槽26的内部固定连接有压力传感器27,压力传感器27与plc控制器5电性连接,压力传感器27的顶面与坐垫24的底面贴合在一起,座位块3的顶面固定连接有靠背垫25,通过设置压力传感器27,当压力传感器27感受到重力后,此时压力传感器27可以将信息传输至plc控制器5,使plc控制器5控制走步机本体1和三节电动推杆10停止工作,从而使患者将手放置坐垫24的顶面后,就可以控制走步机本体1和三节电动推杆10停止工作,便于患者后期停止锻炼,方便休息,走步机本体1的顶面固定连接有支撑棒28,支撑棒28的顶端活动安装有投影灯29,通过设置投影灯29,通过工作人员将投影灯29内部的画面脚印照射在走步机本体1的顶面,此时患者可以根据投影灯29照射的画面在走步机本体1行走,通过工作人员提前设定投影画面脚印之间的间距,从而使患者可以根据投影脚印的间距进行行走,来调节患者走路时脚步之间的间距。
37.工作原理:请参考图1-图7所示,通过设置走步机本体1,倘若患者在走步机本体1上面行走时,通过设置三节电动推杆10,当患者将手抓取在把手11上,此时三节电动推杆10的伸缩轴可以通过把手11带动患者的手臂进行摇动,使患者在走步机本体1上行走时手臂可以摇摆,通过松紧带14与防护板15可以有效的避免了患者手在把手11上摇摆滑落。
38.通过设置电动液压推杆12,通过电动液压推杆12的伸缩轴带动限位块6上下移动,从而便于后期调节把手11的高度,通过设置螺栓31,通过工作人员将连接块8在固定孔7内部调节位置后,再将螺栓31通过螺纹孔30与螺纹槽32螺纹连接在一起,此时连接块8可以固定在固定孔7的内部,便于工作人员调节两个把手11之间的间距,从而使不同身高和体型的患者均可以在走步机本体1上进行锻炼。
39.通过设置投影灯29,通过工作人员将投影灯29内部的画面脚印照射在走步机本体1的顶面,此时患者可以根据投影灯29照射的画面在走步机本体1行走,通过工作人员提前设定投影画面脚印之间的间距,从而使患者可以根据投影脚印的间距进行行走,来调节患者走路时脚步之间的间距。
40.通过设置座位块3,当患者在走步机本体1上长时间锻炼后,患者可以直接坐在座位块3上休息,方便患者休息,通过设置弹簧18,弹簧18可以减缓患者坐在座位块3的下降速度,有效的防止在患者突然坐在座位块3产生的重力传递到走步机本体1的顶面,长时间对走步机本体1造成损伤。
41.通过设置压力传感器27,当压力传感器27感受到重力后,此时压力传感器27可以将信息传输至plc控制器5,使plc控制器5控制走步机本体1和三节电动推杆10停止工作,从而使患者将手放置坐垫24的顶面后,就可以控制走步机本体1和三节电动推杆10停止工作,便于患者后期停止锻炼,方便休息。
42.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。