1.本发明涉及手术器械领域,更具体地说,涉及一种具有稳定功能的肛肠吻合器。
背景技术:
2.吻合器是世界上首例缝合器,用于胃肠吻合已近一个世纪,直到1978年管型吻合器才广泛用于胃肠手术,一般分为一次性或多次使用的吻合器,进口或国产吻合器,它是医学上使用的替代传统手工缝合的设备,由于现代科技的发展和制作技术的改进,临床上使用的吻合器质量可靠,使用方便,严密、松紧合适,尤其是其缝合快速、操作简便及很少有副作用和手术并发症等优点,还使得过去无法切除的肿瘤手术得以病灶切除;然而现有的肛肠吻合器存在以下使用隐患,在使用吻合器进行手术时,吻合器与人体肠道连接后,倘若吻合器由于意外作用力而发生晃动,肠道与吻合器的连接处将会发生撕裂,从而增加了手术事故的风险;另外,在手术进行时,医生会接触到患者肠道流出来的血液,因此,增加血液性疾病传播的可能性,进一步危害医护人员的健康。
技术实现要素:
3.1.要解决的技术问题针对现有技术中存在的问题,本发明的目的在于提供一种具有稳定功能的肛肠吻合器,它可以实现具有优秀的减震防晃动的能力,保证吻合器在使用时的稳定性,降低手术事故的发生可能性,同时不需要人工长时间按压击发杆,并且还可避免直接接触到废液,降低血液性疾病传播的可能性。
4.2.技术方案为解决上述问题,本发明采用如下的技术方案。
5.一种具有稳定功能的肛肠吻合器,包括吻合器主题以及腕固组件;所述吻合器主题还包括操作握管,所述操作握管一端活动连接有连管,所述操作握管外壁一侧转动安装有击发杆,所述击发杆的末端内壁固定设置有锁定钩;所述操作握管背离所述连管的一端转动组装有稳定组件,所述腕固组件与所述稳定组件活动组装,所述操作握管外壁靠近所述击发杆的一侧固定设置有锁定器,所述连管外表面活动套设有吸液器;所述稳定组件还包括纵向稳定组件以及横向稳定组件,所述纵向稳定组件与所述横向稳定组件转动组装。
6.进一步的,所述操作握管背离所述连管的一端转动安装有调节螺母,所述连管的另一端固定连接有钉仓头,所述钉仓头的另一端依次活动组装有保护盖以及抵钉座。
7.进一步的,所述纵向稳定组件还包括第一定管,所述操作握管一端外壁固定设置有定螺座,所述第一定管与所述定螺座活动组装,所述第一定管内部转动组装有第一内管,所述第一内管延伸出第一定管外部的一端外壁固定连接有连杆。
8.进一步的,所述第一定管内壁与所述第一内管外壁均固定设置有挡块,所述第一
定管内部位于所述第一内管的外表面固定安装有卷簧,所述卷簧两端通过所述挡块连接第一定管与第一内管。
9.进一步的,所述第一内管内部活动插入有内螺钉,所述内螺钉一端与所述定螺座内部螺纹连接,所述内螺钉另一端固定设置有旋钮,所述内螺钉外表面固定设置有压板,所述第一内管一端以及内部均嵌入有滚珠。
10.进一步的,所述横向稳定组件还包括活动螺座板,所述活动螺座板一端与所述连杆通过固定螺钉转动连接,所述活动螺座板另一端表面活动组装有第二定管,所述第二定管内部转动组装有第二内管,所述第二内管外壁一侧固定设置有连接管,所述第二定管以及第二内管与所述第一定管以及第一内管的内部结构相同。
11.进一步的,所述腕固组件还包括腕板,所述腕板一侧固定设置有腕带,所述腕板另一侧转动连接有转座,所述转座一侧转动连接有套管,所述套管内部活动插入有内杆,所述内杆外表面位于所述套管的内部套设有缓冲弹簧,所述内杆的末端转动连接有内插杆,所述内插杆活动插入到所述连接管的内部,所述内插杆的末端螺纹连接有限位螺钉。
12.进一步的,所述锁定器还包括锁定壳,所述锁定壳内部一侧固定设置有内导槽,所述内导槽内部滑动安装有抵齿,所述抵齿侧壁与所述锁定壳内壁通过内弹簧连接,所述锁定壳一侧对应所述抵齿的位置活动嵌入有接触按钮,所述接触按钮与所述抵齿通过u形连杆连接,所述锁定钩活动插入到所述锁定壳的内部,并与抵齿活动卡接。
13.进一步的,所述吸液器还包括外管体,所述外管体内部固定设置有内密封管体,所述内密封管体套设在所述连管的外表面,所述外管体与内密封管体的间隙内活动安装有吸液纱布,所述外管体与所述内密封管体的一端连接处开设有储液腔。
14.进一步的,所述外管体内部一侧固定开设有直行槽,所述直行槽两侧内壁均固定开设有内壁槽,所述内壁槽内部滑动安装有滑动块,所述滑动块两端穿过内壁槽固定连接有压布环,所述压布环活动套设在所述吸液纱布的外表面。
15.3.有益效果相比于现有技术,本发明的优点在于:(1)本方案中,倘若由于意外的外力使连杆与操作握管之间发生相对转动,此时,第一内管将在第一定管的内部转动,并同时挤压卷簧,而此时卷簧受到挤压,将会吸收意外作用力,实现缓冲减震的效果,从而降低操作握管在纵向方向上的晃动幅度;另外,纵向稳定组件与横向稳定组件的作用相同,第二定管与第二内管的配合,可以降低操作握管在横向方向上的晃动幅度;最后,当操作握管发生意外晃动时,对应的内杆将在套管内部伸缩移动,此时缓冲弹簧将受到挤压或者拉伸,同时具有缓冲减震的作用,进一步降低操作握管的晃动幅度,根据上述的描述过程,使该吻合器具有优秀的减震防晃动的能力,保证吻合器在使用时的稳定性,降低手术事故的发生可能性。
16.(2)本方案中,在按压击发杆之后,锁定钩将插入到锁定壳的内部,锁定钩与抵齿相卡接,从而能够代替人工长时间按压击发杆的操作,使手术操作更加轻松,避免长时间的按压增加手臂肌肉的负担,进而避免击发杆意外脱手,保证手术的顺利进行。
17.(3)本方案中,吸液纱布可以吸收由连管外壁而流下的液体,实现自动吸收废液的效果,避免手术医生直接接触到过多的废液,降低血液性疾病传播的可能性,保证医护人员的健康。
18.(4)本方案通过扣住滑动块并移动,此时压布环将贴合吸液纱布的外表面而移动,并将吸液纱布内的废液挤出,废液被挤出后便会流到储液腔内进行临时储存,此方式可以保证吸液纱布的吸液能力,提高吸液量,实现可持续的吸液操作,保证手术能够长时间的进行。
附图说明
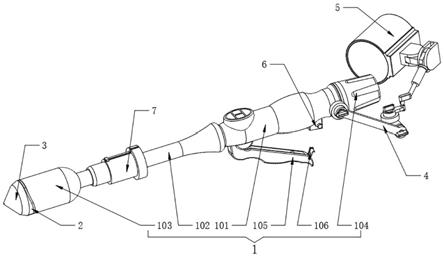
19.图1为本发明的主视立体结构示意图;图2为本发明的稳定组件的结构示意图;图3为本发明的纵向稳定组件的内部结构示意图;图4为本发明的第一内管的侧视结构示意图;图5为本发明的腕固组件的结构示意图;图6为本发明的锁定器的剖视结构示意图;图7为本发明的吸液器的结构示意图;图8为本发明的吸液器的剖视结构示意图。
20.图中标号说明:1、吻合器主题;101、操作握管;102、连管;103、钉仓头;104、调节螺母;105、击发杆;106、锁定钩;2、保护盖;3、抵钉座;4、稳定组件;41、纵向稳定组件;410、定螺座;411、第一定管;412、第一内管;413、挡块;414、卷簧;415、内螺钉;416、压板;417、旋钮;418、滚珠;419、连杆;42、横向稳定组件;420、活动螺座板;421、第二定管;422、第二内管;423、连接管;424、固定螺钉;5、腕固组件;501、腕板;502、腕带;503、转座;504、套管;505、内杆;506、缓冲弹簧;507、内插杆;508、限位螺钉;6、锁定器;601、锁定壳;602、内导槽;603、抵齿;604、内弹簧;605、接触按钮;7、吸液器;701、外管体;702、内密封管体;703、吸液纱布;704、直行槽;705、储液腔;706、压布环;707、内壁槽;708、滑动块。
具体实施方式
21.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述;显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
22.实施例1:请参阅图1-5,一种具有稳定功能的肛肠吻合器,包括吻合器主题1以及腕固组件5;参阅图1,吻合器主题1还包括操作握管101,操作握管101一端活动连接有连管102,操作握管101外壁一侧转动安装有击发杆105,击发杆105的末端内壁固定设置有锁定钩106,操作握管101背离连管102的一端转动安装有调节螺母104,连管102的另一端固定连接有钉仓头103,钉仓头103的另一端依次活动组装有保护盖2以及抵钉座3,握住操作握管101并将钉仓头103插入患者肛门内部,先后控制调节螺母104以及击发杆105进行手术。
23.参阅图1和图2,操作握管101背离连管102的一端转动组装有稳定组件4,腕固组件5与稳定组件4活动组装,稳定组件4还包括纵向稳定组件41以及横向稳定组件42,纵向稳定
组件41与横向稳定组件42转动组装,在医生手术开始前,先将腕固组件5与自身手腕连接,根据操作的姿势调节纵向稳定组件41与横向稳定组件42的相对位置,随后将腕固组件5与横向稳定组件42连接,再接着进行手术。
24.参阅图3和图4,纵向稳定组件41还包括第一定管411,操作握管101一端外壁固定设置有定螺座410,第一定管411与定螺座410活动组装,第一定管411内部转动组装有第一内管412,第一内管412延伸出第一定管411外部的一端外壁固定连接有连杆419,第一定管411内壁与第一内管412外壁均固定设置有挡块413,第一定管411内部位于第一内管412的外表面固定安装有卷簧414,卷簧414两端通过挡块413连接第一定管411与第一内管412,第一内管412内部活动插入有内螺钉415,内螺钉415一端与定螺座410内部螺纹连接,内螺钉415另一端固定设置有旋钮417,内螺钉415外表面固定设置有压板416,第一内管412一端以及内部均嵌入有滚珠418,首先调整连杆419与操作握管101的角度,先旋转旋钮417使内螺钉415带动压板416,使压板416停止挤压第一定管411,接着转动连杆419,此时,第一定管411与定螺座410之间也会发生相对转动,确定好角度之后,旋紧旋钮417使压板416将第一定管411紧贴定螺座410,随后,倘若由于意外的外力使连杆419与操作握管101之间发生相对转动,此时,为了避免操作握管101出现较大幅度的晃动,第一内管412将在第一定管411的内部转动,并同时挤压卷簧414,其中滚珠418的设置用于使第一内管412更顺畅的转动,而此时卷簧414受到挤压,将会吸收意外作用力,实现缓冲减震的效果,从而降低操作握管101在纵向方向上的晃动幅度。
25.参阅图2,横向稳定组件42还包括活动螺座板420,活动螺座板420一端与连杆419通过固定螺钉424转动连接,活动螺座板420另一端表面活动组装有第二定管421,第二定管421内部转动组装有第二内管422,第二内管422外壁一侧固定设置有连接管423,第二定管421以及第二内管422与第一定管411以及第一内管412的内部结构相同,紧接着通过固定螺钉424固定连杆419与活动螺座板420的角度,由于第二定管421以及第二内管422与第一定管411以及第一内管412的内部结构相同,因此纵向稳定组件41与横向稳定组件42的作用相同,第二定管421与第二内管422的配合,可以降低操作握管101在横向方向上的晃动幅度。
26.参阅图5,腕固组件5还包括腕板501,腕板501一侧固定设置有腕带502,腕板501另一侧转动连接有转座503,转座503一侧转动连接有套管504,套管504内部活动插入有内杆505,内杆505外表面位于套管504的内部套设有缓冲弹簧506,内杆505的末端转动连接有内插杆507,内插杆507活动插入到连接管423的内部,内插杆507的末端螺纹连接有限位螺钉508,将腕带502套在手腕上,根据连接管423的位置,旋转转座503以及套管504,将内插杆507插入连接管423,并用限位螺钉508进行限位,当操作握管101发生意外晃动时,对应的内杆505将在套管504内部伸缩移动,此时缓冲弹簧506将受到挤压或者拉伸,同时具有缓冲减震的作用,进一步降低操作握管101的晃动幅度。
27.在使用时,在医生手术开始前,先将腕固组件5与自身手腕连接,根据操作的姿势调节纵向稳定组件41与横向稳定组件42的相对位置,随后将腕固组件5与横向稳定组件42连接,再接着进行手术,具体操作过程如下:首先,将腕带502套在手腕上,根据连接管423的位置,旋转转座503以及套管504,将内插杆507插入连接管423,并用限位螺钉508进行限位;接着,调整连杆419与操作握管101的角度,先旋转旋钮417使内螺钉415带动压板416,使压板416停止挤压第一定管411,接
着转动连杆419,此时,第一定管411与定螺座410之间也会发生相对转动,确定好角度之后,旋紧旋钮417使压板416移动后将第一定管411紧贴定螺座410;再接着通过固定螺钉424固定连杆419与活动螺座板420的角度;其中,倘若由于意外的外力使连杆419与操作握管101之间发生相对转动,此时,为了避免操作握管101出现较大幅度的晃动,第一内管412将在第一定管411的内部转动,并同时挤压卷簧414,其中滚珠418的设置用于使第一内管412更顺畅的转动,而此时卷簧414受到挤压,将会吸收意外作用力,实现缓冲减震的效果,从而降低操作握管101在纵向方向上的晃动幅度;另外,由于第二定管421以及第二内管422与第一定管411以及第一内管412的内部结构相同,因此纵向稳定组件41与横向稳定组件42的作用相同,第二定管421与第二内管422的配合,可以降低操作握管101在横向方向上的晃动幅度;最后,当操作握管101发生意外晃动时,对应的内杆505将在套管504内部伸缩移动,此时缓冲弹簧506将受到挤压或者拉伸,同时具有缓冲减震的作用,进一步降低操作握管101的晃动幅度。
28.实施例3:请参阅图6,一种具有稳定功能的肛肠吻合器,包括吻合器主题1以及腕固组件5;参阅图1和图6,操作握管101外壁靠近击发杆105的一侧固定设置有锁定器6,锁定器6还包括锁定壳601,锁定壳601内部一侧固定设置有内导槽602,内导槽602内部滑动安装有抵齿603,抵齿603侧壁与锁定壳601内壁通过内弹簧604连接,锁定壳601一侧对应抵齿603的位置活动嵌入有接触按钮605,接触按钮605与抵齿603通过u形连杆连接,锁定钩106活动插入到锁定壳601的内部,并与抵齿603活动卡接,根据锁定钩106与抵齿603的斜面方向,会使抵齿603移动并挤压内弹簧604,最后使锁定钩106与抵齿603相卡接,而按压接触按钮605,便可使锁定钩106与抵齿603脱离,从而使击发杆105复位。
29.在使用时,在按压击发杆105之后,锁定钩106将插入到锁定壳601的内部,根据锁定钩106与抵齿603的斜面方向,会使抵齿603移动并挤压内弹簧604,最后使锁定钩106与抵齿603相卡接,从而能够代替人工长时间按压击发杆105的操作,使手术操作更加轻松,避免长时间的按压增加手臂肌肉的负担,进而避免击发杆105意外脱手,保证手术的顺利进行,而需要使击发杆105复位时,按压接触按钮605,便可使锁定钩106与抵齿603脱离,从而使击发杆105复位。
30.实施例3:请参阅图7-8,一种具有稳定功能的肛肠吻合器,包括吻合器主题1以及腕固组件5;参阅图7和图8,连管102外表面活动套设有吸液器7,吸液器7还包括外管体701,外管体701内部固定设置有内密封管体702,内密封管体702套设在连管102的外表面,外管体701与内密封管体702的间隙内活动安装有吸液纱布703,吸液纱布703将吸收废液,根据毛细纤维的特性,废液会快速浸湿吸液纱布703,并使吸液纱布703稍微膨胀,外管体701与内密封管体702的一端连接处开设有储液腔705,外管体701内部一侧固定开设有直行槽704,直行槽704两侧内壁均固定开设有内壁槽707,内壁槽707内部滑动安装有滑动块708,滑动块708两端穿过内壁槽707固定连接有压布环706,压布环706活动套设在吸液纱布703的外表面,扣住滑动块708并沿着直行槽704的方向移动,此时压布环706将贴合吸液纱布703的外表面而移动,并将吸液纱布703内的废液挤出,废液被挤出后便会流到储液腔705内进行
临时储存。
31.在使用时:在手术进行时,有肠道排出的废液,会有一部分沿着连管102的表面而流动,随后,吸液纱布703将吸收废液,根据毛细纤维的特性,废液会快速浸湿吸液纱布703,并使吸液纱布703稍微膨胀,此过程,可以吸收由连管102外壁而流下的液体,实现自动吸收废液的效果,避免手术医生直接接触到过多的废液,降低血液性疾病传播的可能性,保证医护人员的健康;另外,当吸液纱布703吸液一端时间之后,扣住滑动块708并沿着直行槽704的方向移动,此时压布环706将贴合吸液纱布703的外表面而移动,并将吸液纱布703内的废液挤出,废液被挤出后便会流到储液腔705内进行临时储存,过程中要保证直行槽704位于上方,此方式可以保证吸液纱布703的吸液能力,提高吸液量,实现可持续的吸液操作,保证手术能够长时间的进行。
32.以上所述,仅为本发明较佳的具体实施方式;但本发明的保护范围并不局限于此。任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其改进构思加以等同替换或改变,都应涵盖在本发明的保护范围内。