信息处理装置、跑步指标导出方法以及存储介质
1.关联申请的参考
2.本技术主张以在2020年2月25日申请的在日本专利申请的申请编号2020-029852号为基础的优先权,将该基础申请的内容全都引入到本技术中。
技术领域
3.本公开涉及信息处理装置、信息处理方法以及存储介质。
背景技术:
4.在例如在日本专利申请的公开编号2001-29329号公报中,公开了将测量对测力板(force plate)的反作用力的分布形状的分布形状测量薄片重叠设置于该测力板的上表面的地面反作用力测量装置。
5.特开2001-29329号公报
技术实现要素:
6.本发明提供一种信息处理装置,其特征在于,具备处理器,所述处理器执行:基于表示对象者进行奔跑或步行时得到的第1运动数据的大小的第2运动数据,在每个某一期间取得该第2运动数据的峰值,基于所取得的所述第2运动数据的峰值和从所述第1运动数据得到的所述对象者的落地的定时,在每个所述某一期间导出与所述对象者的落地冲击相关的指标。
附图说明
7.图1是表示实施方式的跑步解析系统的框图。
8.图2是表示用户装备测定装置的状态的说明图。
9.图3是表示测定装置的功能结构的框图。
10.图4是表示跑步解析装置的功能结构的框图。
11.图5是表示测量跑步中的被实验者的脚在测力板落地时的反作用力的结果的图表。
12.图6是表示与落地冲击相关的vip、valr、vilr这3个测力板指标的图。
13.图7是将表示上下方向的反作用力的波形和表示3方向(左右方向、前后方向以及上下方向)的各反作用力的范数(norm)的范数波形重合示出的图表。
14.图8是表示跑步指标导出处理的控制次序的流程图。
15.图9是表示进行向世界坐标系的坐标变换处理的加速度数据的波形的图。
16.图10是将加速度范数数据的波形和测力板波形重合示出的图表。
17.图11是表示跑步指标的导出方法的图。
18.图12是表示表示地面反作用力的波形的估计处理的控制次序的流程图。
19.图13是表示加速度范数数据的波形的补正方法的图。
20.图14是表示加速度范数数据的补正后的波形的图。
21.图15是表示地面反作用力的落地冲击分量和推进分量的估计方法的图。
22.图16是表示落地冲击分量的近似波形和推进分量的近似波形的图表。
23.图17是表示估计测力板波形和测力板波形的图表。
24.图18是表示落地冲击分量的近似波形和推进分量的近似波形的图表。
25.图19是表示估计测力板波形和测力板波形的图表。
具体实施方式
26.以下参考附图来详细说明实施方式。另外,本发明并不限定于图示例。
27.《跑步解析系统》
28.参考图1以及图2来说明本实施方式的结构。首先参考图1来说明本实施方式的跑步解析系统1。
29.图1是表示本实施方式的跑步解析系统1的框图。
30.如图1所示那样,跑步解析系统1具备测定装置(信息处理装置)10和跑步解析装置(外部设备)20而构成。
31.测定装置10是如下那样装置:在跑步的训练时、竞赛时装备于对象者(用户或跑者等),并且采集该训练时、该竞赛时的运动数据(例如加速度数据、角速度数据等),对从该运动数据导出的跑步指标数据进行记录。测定装置10例如如图2所示那样具有附属的腰带b,通过腰带b在用户的腰(荐骨)的位置固定测定装置10。
32.另外,测定装置10也可以取代腰带b而具有夹子,通过用该夹子夹着用户的跑步穿戴物,来在用户的腰的位置固定测定装置10。
33.跑步解析装置20显示从测定装置10取得的用户的跑步指标数据。作为跑步解析装置20,例如能举出智能手表、智能手机、平板pc等。以下设为跑步解析装置20是智能手表来进行说明。
34.《测定装置》
35.接下来参考图3来说明测定装置10的功能结构。图3是表示测定装置10的功能结构的框图。
36.如图3所示那样,测定装置10具备cpu(central processing unit,中央处理器)11、ram(random access memory,随机存取存储器)12、存储部13、显示部14、操作部15、传感器部16和通信部17而构成。测定装置10的各部经由总线18而连接。
37.cpu(取得单元、指标导出单元、显示控制单元)11控制测定装置10的各部。cpu11将存储于存储部13的系统程序以及应用程序当中所指定的程序读出并在ram12展开,通过与该程序的协作来执行各种处理。
38.ram12是易失性的存储器,形成暂时存放各种数据、程序的工作区。
39.存储部13由闪速存储器、eeprom(electrically erasable programmable rom,电可擦可编程rom)等构成。在存储部13中存储有在cpu11执行的系统程序、应用程序、执行这些程序所需的数据等。另外,在存储部13中存储有在跑步的训练时、竞赛时采集的运动数据以及从该运动数据导出的跑步指标数据。
40.显示部14由多个led灯构成,是能显示数据的发送状态(例如是否是正在发送数据
中)、gps接收机的on/off状态等的显示部。
41.操作部15具备切换电源的on/off的电源按钮(图示省略)、指示数据取得的开始/结束的开始/结束按钮(图示省略)等,cpu11基于来自该操作部15的指示来控制各部。
42.传感器部16具备3轴加速度传感器、陀螺仪传感器、地磁传感器等能检测测定装置10的活动的运动传感器、能取得测定装置10的位置信息的gps接收机等,将测定结果输出到cpu11。
43.通信部17将从跑步的训练时、竞赛时的运动数据导出的跑步指标数据基于cpu11的控制而发送到跑步解析装置20,例如是采用bluetooth(注册商标)等无线标准的通信部、usb端子等有线式的通信部。
44.《跑步解析装置》
45.接下来参考图4来说明跑步解析装置20的功能结构。图4是表示跑步解析装置20的功能结构的框图。
46.跑步解析装置20具备cpu21、ram22、存储部23、显示部24、操作部25和通信部26而构成。跑步解析装置20的各部经由总线27而连接。
47.cpu21控制跑步解析装置20的各部。cpu21将存储于存储部23的系统程序以及应用程序当中指定的程序读出并在ram22展开,通过与该程序的协作来执行各种处理。
48.ram22是易失性的存储器,形成暂时存放各种数据、程序的工作区。
49.存储部23例如由闪速存储器、eeprom、hdd(hard disk drive,硬盘驱动器)等构成。在存储部23中存储有在cpu21执行的系统程序、应用程序、执行这些程序所需的数据等。
50.显示部24由lcd(liquid crystal display,液晶显示器)、el(electro luminescence,电致发光)显示器等构成,按照从cpu21指示的显示信息来进行各种显示。
51.操作部25具有设于跑步解析装置20的主体部的各种操作按钮(图示省略)、设于显示部24上的触摸传感器(图示省略)等而构成,接受用户的输入操作,并将该操作信息输出到cpu21。
52.通信部26从测定装置10接收跑步指标数据,例如是采用bluetooth(注册商标)等无线标准的通信部、usb端子等有线式的通信部。
53.《测定装置的动作》
54.接下来说明测定装置10的动作即跑步指标导出处理和表示地面反作用力的波形的估计处理。在此,通过跑步指标导出处理导出的跑步指标是和使用测力板导出的与落地冲击相关的vip(vertical impact peak,垂直冲击峰值)、valr(vertical average loading rate,垂直平均落地速率)、vilr(vertical instantaneous load rate,垂直瞬间落地速率)这3个指标(以下称作测力板指标)有相关的指标。另外,成为表示地面反作用力的波形的估计处理的估计对象的波形,是导出上述的与落地冲击相关的3个测力板指标时所用的表示地面反作用力的波形(表示上下方向的反作用力的波形)。为此,在说明测定装置10的动作前,对上述的表示地面反作用力的波形以及与落地冲击相关的3个测力板指标进行说明。
55.图5是表示测量跑步中的被实验者的脚在测力板落地时的反作用力的结果的图表。图中的虚线所示的波形,表示跑步中的被实验者的左右方向的反作用力,实线所示的波形表示该被实验者的前后方向的反作用力,一点划线所示的波形表示该被实验者的上下方
向的反作用力。另外,在左右方向上,将左手方向设为正,将右手方向设为负。在前后方向上,将行进方向相反方向设为正,将行进方向设为负。在上下方向上,将上方向设为正,将下方向设为负。另外,该图表是通过用测量到的反作用力的值除以被实验者的体重的值而归一化得到。即,该图表中的纵轴的单位[n/kg]与表示加速度的单位[m/s2]同等。
[0056]
如图5所示那样,表示上下方向的反作用力的波形(一点划线所示的波形)、即成为后述的表示地面反作用力的波形的估计处理的估计对象的波形(以下称作测力板波形)通常具有2个峰值。这些峰值当中第一个峰值(图中的左侧的峰值),缘于通过落地冲击产生的力,第二个峰值(图中的右侧的峰值)缘于被实验者使身体推进时产生的力。另外,在测力板波形中,在落地冲击小的情况下,还存在峰值为一个波形的情形。
[0057]
图6是表示与落地冲击相关的vip、valr、vilr这3个测力板指标的图。图中所示的波形是归一化的测力板波形,图表的纵轴表示相对于体重的垂直方向(上下方向)的地面反作用力(vgrf(bw),vertical ground reaction force(body weight),垂直地面反作用力(体重)),横轴将落地的定时表示为0%(stance),将成为该落地的对象的脚的离地的定时表示为100%(stance)。
[0058]
如图6所示那样,vip是测力板波形的第一个峰值(第1峰值)的峰值。vilr是从vip的值的20%上升到80%的期间内的倾斜度的最大值。valr是从vip的值的20%上升到80%的期间的平均倾斜度。
[0059]
图7是将测力板波形(表示上下方向的反作用力的波形)和表示3方向(左右方向、前后方向以及上下方向)的各反作用力的范数的范数波形重合示出的图表。在图中,用实线的波形表示范数波形,用虚线的波形表示测力板波形(表示上下方向的反作用力的波形)。
[0060]
如图7所示那样,范数波形和测力板波形(表示上下方向的反作用力的波形)大部分重叠。据此可知,上下方向的反作用力占据地面反作用力(地面反作用力)当中的大部分。另外,据此,通过在考虑由测定装置10得到的上下方向的加速度数据(后述)时使用加速度数据的范数,能逆估计方向的散开。
[0061]
《跑步指标导出处理》
[0062]
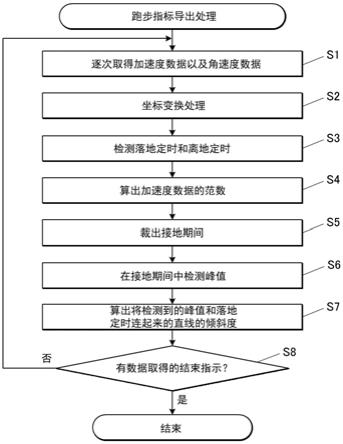
图8是表示跑步指标导出处理的控制次序的流程图。另外,跑步指标导出处理,例如是以在开始跑步的训练时,由用户经由上述的开始/结束按钮(操作部15)进行了指示数据取得的开始的按下操作这一情况为契机而开始的处理。
[0063]
如图8所示那样,首先,测定装置10的cpu11逐次取得传感器部16的3轴加速度传感器中检测到的加速度数据、以及陀螺仪传感器中检测到的角速度数据(步骤s1)。
[0064]
接下来,cpu11进行将步骤s1中取得的加速度数据以及角速度数据从传感器坐标系向世界坐标系变换的坐标变换处理(步骤s2)。在此,世界坐标系的坐标如图2所示那样,将x轴设为跑步中的用户的左右方向,将y轴设为该用户的前后方向,将z轴设为该用户的上下方向。另外,在x轴上,将左手方向设为正,将右手方向设为负。在y轴上,将行进方向相反方向设为正,将行进方向设为负。在z轴上,将上方向设为正,将下方向设为负。即,通过进行从传感器坐标系向世界坐标系的坐标变换处理,能在与上述的测力板指标相同的坐标系中处置加速度数据以及角速度数据。
[0065]
另外,由于从传感器坐标系向世界坐标系的数据变换方法是公知的,因此省略其说明。
[0066]
图9是表示进行过向世界坐标系的坐标变换处理的加速度数据的波形的图。图中的虚线所示的波形表示跑步中的用户的左右方向(x轴)的加速度数据,实线所示的波形表示该用户的前后方向(y轴)的加速度数据,一点划线所示的波形表示该用户的上下方向(z轴)的加速度数据。
[0067]
如图9所示那样,在用户的上下方向(z轴)的加速度数据的波形中,与上述的测力板波形相比,成为难以判明2个峰值的形状。据此可知,加速度数据是由装备于跑步中的用户的腰的测定装置10采集的数据,在从地面受到的力在用户的脚、小腿、大腿、腰的各个部位和将这些部位连起来的脚踝、膝、股关节的各部位中传递时,该力的方向、时间散开地传递到腰。
[0068]
接下来,cpu11,基于在步骤s2进行过坐标变换处理的加速度数据以及角速度数据来检测用户的脚抵达地面的落地的定时、以及用户的脚从地面离开的离地的定时(步骤s3)。
[0069]
另外,关于落地的定时和离地的定时的各检测方法,例如在特开2018-8015号公报中公开,在此省略其说明。
[0070]
接下来,cpu11将在步骤s2中进行过坐标变换处理的加速度数据、即x轴、y轴、z轴的各加速度数据的范数导出(步骤s4)。在此,由于在z轴的加速度数据中包含重力加速度,因此以从该z轴的加速度数据减去重力加速度分量的状态将上述加速度数据的范数导出。
[0071]
图10表示将步骤s4中导出的加速度范数数据的波形和测力板波形重合示出的图表。在图中,用实线的波形表示测力板波形,用虚线的波形表示加速度范数数据的波形。
[0072]
如图10所示那样,在从地面受到的力传递到装备于用户的腰的测定装置10的过程中,该从地面受到的力当中落地冲击分量,由于其时间短且大,因此位于该用户的脚与腰的中间的身体部位、关节的影响少而直接传递,但该从地面受到的力当中推进力分量由于是通过用该用户的肌肉使关节活动而产生的,因此受到该关节的影响而较大地散开。为此,在本实施方式中,着眼于在测力板波形和加速度范数数据的波形中没有大差的落地冲击分量,把将表示用户的落地的定时的点和第1峰值连起来的直线的倾斜度作为和测力板指标存在相关的指标(跑步指标)。
[0073]
接下来,cpu11,从在步骤s4中导出的加速度范数数据的波形裁出从上述的落地的定时到离地的定时的接地期间(步骤s5)。例如如图11所示那样,在12.73s的定时是落地的定时t1、12.9s的定时是离地的定时t2的情况下,将从该落地的定时t1到离地的定时t2的期间作为接地期间裁出。
[0074]
接下来,cpu11在步骤s5中裁出的接地期间中检测加速度范数数据的波形的第1峰值(步骤s6)。具体地,如图11所示那样,cpu11将在步骤s5中裁出的接地期间中最初出现的极大点、即在该接地期间中在用户的落地的定时t1以后出现的最初的极大点检测为第1峰值p1。
[0075]
另外,第1峰值的检测方法并不限定于上述的方法,例如也可以从接地期间的多个极大点当中选出极大值大的前几个(例如4个)极大点,将在这些当中最初出现的极大点检测为第1峰值。另外,也可以从接地期间的多个极大点当中选出显著性(prominence)大的前几个(例如4个)极大点,将在这些当中最初出现的极大点检测为第1峰值。另外,出于其他观点,用户的脚落地时的冲击(落地冲击)由于向跑者的身后方向发挥作用,因此可以将y轴的
加速度在落地的定时起在该身后方向上在某一期间、即y轴的加速度数据的值成为正的值的期间中最大的极大点检测为第1峰值,也可以将在落地的定时起一定的期间(例如70ms)之间产生的极大点当中极大值最大的极大点检测为第1峰值。另外,在检测第1峰值时,也可以在对加速度范数数据通过实施滤波处理除去噪声后再检测第1峰值。进而,也可以在导出加速度数据的范数前对该加速度数据实施滤波处理。
[0076]
接下来,cpu11导出将在步骤s6检测到的第1峰值和表示检测到该第1峰值的接地期间中的落地的定时的落地点连起来的直线的倾斜度,作为跑步指标(步骤s7)。具体地,如图11所示那样,cpu11导出将第1峰值p1和表示落地的定时t1的落地点p2连起来的直线l的倾斜度。在此,在测力板波形的情况下,在落地的定时,加速度是0,与此相对,在加速度范数数据的波形的情况下,在落地的定时前,加速度也不会成为0。为此,视作在落地的定时t1的加速度是0,算出将第1峰值p1和表示落地的定时t1的落地点p2(加速度,0m/s2)连起来的直线l的倾斜度,将该倾斜度作为估计值。
[0077]
接下来,cpu11判定是否由用户经由上述的开始/结束按钮(操作部15)进行了指示数据取得的结束的按下操作(步骤s8)。
[0078]
在步骤s8,在判定为未由用户经由开始/结束按钮(操作部15)进行了指示数据取得的结束的按下操作的情况下(步骤s8“否”),cpu11将处理返回步骤s1,重复进行这以后的处理。
[0079]
另一方面,在步骤s8,在判定为由用户经由开始/结束按钮(操作部15)进行了指示数据取得的结束的按下操作的情况下(步骤s8“是”),cpu11将跑步指标导出处理结束。
[0080]
《表示地面反作用力的波形的估计处理》
[0081]
图12是表示表示地面反作用力的波形的估计处理的控制次序的流程图。另外,该表示地面反作用力的波形的估计处理,与跑步指标导出处理同样,都是开始跑步的训练等时由用户经由上述的开始/结束按钮(操作部15)进行了指示数据取得的开始的按下操作这一情况为契机而开始的处理。另外,由于表示地面反作用力的波形的估计处理的步骤s11~步骤s15的处理是与跑步指标导出处理的步骤s1~步骤s5的处理同样的处理,因此省略这些处理的说明,对步骤s16以后的处理进行说明。
[0082]
如图12所示那样,在步骤s16,测定装置10的cpu11补正接地期间的加速度范数数据的波形(步骤s16)。具体地,如图13所示那样,在裁出了将13.69s的定时设为落地的定时t1、将13.94s的定时设为离地的定时t2的接地期间的情况下,cpu11将该落地的定时t1的加速度为0的地点设为落地点p2,通过将该落地点p2和该接地期间中最初出现的极小点p3连起来的线段来补正加速度范数数据的波形。另外,cpu11将离地的定时t2的加速度为0的地点设为离地点p4,通过将该离地点p4和该接地期间中最后出现的极小点p5连起来的线段来补正加速度范数数据的波形。
[0083]
图14是表示加速度范数数据的补正后的波形的图。图中的一点划线所示的波形是加速度范数数据的补正后的波形。另外,直至到达图中的极小点p3为止的虚线以及极小点p5以后的虚线表示进行上述补正前的加速度范数数据的波形的一部分。另外,图中的实线所示的波形是测力板波形。
[0084]
如图14的虚线的波形所示那样,测定装置10由于在装备于用户的腰的状态下使用,且在接地期间以外也产生加速度,因此如该图的一点划线的波形那样进行加速度范数
数据的波形的补正。另外,也可以将落地点p2与极小点p3之间、离地点p4与极小点p5之间通过样条插值(spline interpolation)进行补正。
[0085]
接下来,cpu11根据加速度范数数据的补正后的波形来估计地面反作用力的落地冲击分量和推进分量(步骤s17)。具体地,如图15所示那样,cpu11在加速度范数数据的补正后的波形中检测第1峰值p1,将对从落地点p2到该第1峰值p1进行积分而得到的值作为落地冲击的上升量(图中的斜线部分),设为有与该上升量同等的下降量,来将该上升量的2倍的值估计为落地冲击分量。另外,cpu11在上述的补正后的波形中,将从对从落地点p2到离地点p4进行积分而得到的值减去落地冲击分量得到的值估计为推进分量。在此,若将落地冲击的上升量设为c1a,将落地冲击分量设为c1,将推进分量设为c2,将落地的定时(采样点)设为0,将第1峰值的定时(采样点)设为t1,将离地的定时(采样点)设为t2,将各个采样点中的加速度范数的值设为a(n),则落地冲击的上升量c1a用式(1)表示,落地冲击分量c1用式(2)表示,推进分量c2用式(3)表示。
[0086]
【数学式1】
[0087][0088]
【数学式2】
[0089]
c1=2
×
c1a
···
(2)
[0090]
【数学式3】
[0091][0092]
接下来,cpu11生成在步骤s17估计的落地冲击分量的近似波形(步骤s18)。具体地,cpu11首先进行各采样点的线性插值,以使得上述的采样点为0的点(落地的定时)成为0,采样点为t1的点(第1峰值的定时)成为π/2,采样点为2t1的点成为π。然后,cpu11用将进行过线性插值的各采样点(x,0~π)的值代入到“sinx”而得到的值的合计除以落地冲击分量c1,导出近似式k
·
sinx的系数k,导出该近似式k
·
sinx。然后,cpu11如图16所示那样,根据该近似式k
·
sinx生成落地冲击分量的近似波形(图中的实线的波形)。另外,图16的虚线所示的波形是加速度范数数据的波形。
[0093]
接下来,cpu11生成在步骤s17估计的推进分量的近似波形(步骤s19)。具体地,cpu11首先进行各采样点的线性插值,以使得上述的采样点为0的点(落地的定时)成为0,采样点为t2的点(离地的定时)成为π。然后,cpu11通过用将进行过线性插值的各采样点(x,0~π)的值代入“sinx”而得到的值的合计除以推进分量c2,来导出近似式m
·
sinx的系数m,导出该近似式m
·
sinx。然后,cpu11如图16所示那样,根据该近似式m
·
sinx来生成推进分量的近似波形(图中的一点划线的波形)。
[0094]
接下来,cpu11生成估计测力板波形(步骤s20)。具体地,cpu11通过如图17所示那样将在步骤s18生成的落地冲击分量的近似波形(图16的实线的波形)和步骤s19中生成的推进分量的近似波形(图16的一点划线的波形)进行合成,来生成估计测力板波形(图中的点线的波形)。另外,图17的虚线所示的波形是测力板波形。
[0095]
接下来,cpu11判定是否由用户经由上述的开始/结束按钮(操作部15)进行了指示数据取得的结束的按下操作(步骤s21)。
[0096]
在步骤s21,在判定为未由用户经由开始/结束按钮(操作部15)进行指示数据取得
的结束的按下操作的情况下(步骤s21“否”),cpu11将处理返回步骤s11,重复进行这以后的处理。
[0097]
另一方面,在步骤s21,在判定为由用户经由开始/结束按钮(操作部15)进行了指示数据取得的结束的按下操作的情况下(步骤s21“是”),cpu11结束表示地面反作用力的波形的估计处理。
[0098]
另外,在表示地面反作用力的波形的估计处理的步骤s18以及步骤s19中,将落地冲击分量和推进分量各自用正弦波进行近似,但也可以用余弦波进行近似。
[0099]
具体地,关于落地冲击分量,cpu11首先与用正弦波进行近似时同样地进行各采样点的线性插值,以使得采样点为0的点(落地的定时)成为0,采样点为t1的点(第1峰值的定时)成为π/2,采样点为2t1的点成为π。然后,cpu11通过用将进行过线性插值的各采样点(x,0~π)的值代入“1-cosx”而得到的值的合计除以落地冲击分量c1,来导出近似式k(1-cosx)的系数k,导出该近似式k(1-cosx)。然后,cpu11如图18所示那样,根据该近似式k(1-cosx)来生成落地冲击分量的近似波形(图中的实线的波形)。另外,关于推进分量,cpu11首先与用正弦波进行近似时同样地进行各采样点的线性插值,以使得上述的采样点为0的点(落地的定时)成为0,采样点为t2的点(离地的定时)成为π。然后,cpu11通过用将进行过线性插值的各采样点(x,0~π)的值代入“1-cosx”而得到的值的合计除以推进分量c2,来导出近似式m(1-cosx)的系数m,导出该近似式m(1-cosx)。然后,cpu11如图18所示那样,根据该近似式m(1-cosx)来生成推进分量的近似波形(图中的一点划线的波形)。然后,cpu11如图19所示那样,通过将上述的落地冲击分量的近似波形(图18的实线的波形)和上述的推进分量的近似波形(图18的一点划线的波形)进行合成,来生成估计测力板波形(图中的点线的波形)。
[0100]
例如在日本的专利申请的公开编号2001-29329号公报中,公开了将测量对测力板的反作用力的分布形状的分布形状测量薄片重叠设置于该测力板的上表面的地面反作用力测量装置。但在公开编号2001-29329号公报公开的地面反作用力测量装置中,对设置测力板的场所、空间存在限制,因此1次的奔跑中,仅能测量数步程度的地面反作用力。为此,在从该数步程度的地面反作用力的数据得到的指标(例如与落地冲击相关的指标)中,作为用于进行与跑步相关的解析的信息并不充分。
[0101]
但本实施方式的测定装置10,基于表示用户(对象者)奔跑时得到的第1运动数据的大小的第2运动数据,在每个某一期间(接地期间)取得该第2运动数据的峰值(第1峰值),基于所取得的第2运动数据的峰值和从第1运动数据得到的用户的落地的定时,来在每个该某一期间导出与用户的落地冲击相关的指标。
[0102]
因此,根据测定装置10,由于能在每个某一期间导出与用户的落地冲击相关的指标,能充分取得用于进行与跑步相关的解析的与落地冲击相关的指标。
[0103]
另外,测定装置10在每个某一期间(接地期间)从加速度范数数据的波形取得峰值(第1峰值)。
[0104]
因此,根据测定装置10,通过基于加速度范数数据的峰值和从加速度数据得到的用户的落地的定时导出与用户的落地冲击相关的指标,能取得与上述的测力板指标存在相关的指标。
[0105]
另外,根据测定装置10,通过在每个某一期间(接地期间)中取得用户的落地的定时以后出现的最初的极大点作为峰值(第1峰值),能合适地导出与用户的落地冲击相关的
指标。
[0106]
另外,测定装置10导出将表示所取得的峰值(第1峰值)的峰值点和表示用户的落地的定时的落地点连起来的直线的倾斜度,作为与用户的落地冲击相关的指标(跑步指标)。
[0107]
因此,根据测定装置10,能取得过去没有的新的与落地冲击相关的指标。
[0108]
另外,测定装置10基于表示用户的腰部中的第1运动数据的大小的第2运动数据,在每个某一期间(接地期间)取得该第2运动数据的峰值(第1峰值)。
[0109]
因此,根据测定装置10,由于能通过将自装置装备于用户的腰部来取得第2运动数据的峰值(第1峰值),因此能简便地取得该第2运动数据的峰值(第1峰值)。其结果,根据测定装置10,不用像过去那样使用大规模装置,即使在通常的跑步时也能逐次导出与用户的落地冲击相关的指标,因此,能在竞赛时掌握该指标的变化。
[0110]
另外,上述实施方式中的记述是本发明所涉及的测定装置的一例,并不限定于此。
[0111]
例如在上述实施方式的表示地面反作用力的波形的估计处理中,将生成推进分量的近似波形时的该推进分量的期间设为从落地的定时到离地的定时、即接地期间,来生成近似波形,但例如也可以将从第1峰值的定时到离地的定时的期间设为该推进分量的期间,来生成近似波形。
[0112]
另外,在上述实施方式的表示地面反作用力的波形的估计处理中,在生成推进分量的近似波形的情况下,在该推进分量的期间内通过正弦波或余弦波来一致地进行近似,但例如也可以取得推进分量的峰值,也可以在从落地的定时到该峰值的上升量、和从该峰值到离地的定时的下降量分别进行近似(例如将上升量用余弦波进行近似,将下降量用正弦波进行近似)。
[0113]
另外,在上述实施方式的跑步指标导出处理中,作为跑步指标,导出将表示用户的落地的定时的点和第1峰值连起来的直线的倾斜度,但也可以进一步通过将该倾斜度、该第1峰值的值适用于给定的算出式,来算出上述的vip、valr、vilr这3个测力板指标。
[0114]
另外,上述实施方式的跑步指标导出处理以及表示地面反作用力的波形的估计处理由测定装置10的cpu11执行,但本发明并不限定于此。例如,只要在至少一个cpu执行各个处理的一部分即可。具体地,例如在测定装置10中,取得第1运动数据,将该第1运动数据经由通信部17发送到跑步解析装置20。然后,跑步解析装置20的cpu21可以使用所取得的第1运动数据来进行跑步指标导出处理以及表示地面反作用力的波形的估计处理。
[0115]
以上,说明了实施方式,但本发明的范围并不限定于上述的实施方式,包含记载于权利要求书的发明的范围和其等同的范围。