1.本实用新型涉及医疗康复领域,尤其涉及一种医疗康复用手臂训练器。
背景技术:
2.在手臂骨折或者受到其他伤害时,由于治疗的需要,手臂往往需要用钢钉、钢板或者石膏进行固定,避免手臂受到外界伤害,从而起到治疗的效果。
3.目前手臂在由钢钉、钢板或者石膏进行固定后,肘关节往往是不运动的,长时间不运动可能会导致关节灵活性降低,甚至无法运动,故需要一种医疗康复用手臂训练器以解决上述问题。
技术实现要素:
4.本实用新型实施例的目的在于提供一种医疗康复用手臂训练器,旨在解决以下问题:肘关节在骨折后长时间不运动导致灵活性差。
5.本实用新型实施例是这样实现的,一种医疗康复用手臂训练器,包括:大臂杆,其为两端连通的空心机构,用于使用者大臂穿入;转动机构,其与大臂杆一端固定连接,所述大臂杆一端延伸至转动机构内部,所述转动机构上设置有可在其带动下转动的小臂杆,小臂杆为空心结构,用于使用者小臂穿入;压紧机构,其设置有两个且分别安装在大臂杆及小臂杆上,压紧机构动力输入端及输出端分别设置在大臂杆及小臂杆外部及内部,用于将使用者手臂压紧固定。
6.优选地,所述转动机构包括:轴套,其内开设有空腔,所述大臂杆延伸至轴套内且与轴套固定连接,所述轴套上开设有供小臂杆转动的通槽,小臂杆可在通槽内转动;驱动齿轮,其转动安装在轴套内且为不完全齿轮,所述驱动齿轮啮合有安装在轴套中部的从动齿轮,从动齿轮为完全齿轮,驱动齿轮可带动从动齿轮间歇转动;转杆,一端与从动齿轮固定连接,所述转杆另一端与小臂杆设置在轴套内的一端固定连接,转杆可带动小臂杆转动;复位组件,其两端固定设置在轴套内壁上,用于拉动转杆反向转动复位。
7.优选地,所述复位组件包括:导杆,其两端和轴套内壁固定连接,所述导杆上套设有可在其上滑动的齿条,齿条与从动齿轮铰接;第一弹性件,两端分别与齿条及轴套内壁固定连接,用于拉动齿条运动复位。
8.优选地,所述压紧机构包括:压块,其设置在大臂杆内且分布在两侧,两侧压块相互远离端和大臂杆内壁之间固定设置有用于推动压块向内侧运动的第二弹性件;拉杆,其一端与压块固定连接,拉杆另一端延伸至大臂杆外且固定设置有拉把,用于拉动一侧压块向外侧移动;联动组件,其分布在两侧且固定设置在大臂杆内壁上,所述联动组件同时与两侧压块铰接,用于拉动两侧压块做同步相向运动。
9.优选地,所述联动组件包括:滑杆,固定设置在大臂杆内壁上,滑杆套设有可在其上滑动的滑块,滑杆及滑块设置在两侧压块之间;联动杆,其两端分别与滑块及压块铰接,用于拉动两侧压块同步运动。
10.本实用新型提供的医疗康复用手臂训练器不仅可以对手臂肘关节进行训练,而且可以对手臂进行固定,避免训练时手臂脱落,操作简单,实用性较强。
附图说明
11.图1为医疗康复用手臂训练器结构示意图。
12.图2为医疗康复用手臂训练器的转动机构示意图。
13.图3为医疗康复用手臂训练器的转动机构侧视图。
14.图4为医疗康复用手臂训练器的压紧机构示意图。
15.附图中:1-大臂杆,2-转动机构,3-小臂杆,4-压紧机构,21-轴套,22-通槽,23-驱动齿轮,24-从动齿轮,25-转杆,26-复位组件,261-导杆,262-齿条,263-第一弹性件,41-压块,42-第二弹性件,43-拉杆,44-拉把,45-联动组件,451-滑杆,452-滑块,453-联动杆。
具体实施方式
16.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不限定本实用新型。
17.以下结合具体实施例对本实用新型的具体实现进行详细描述。
18.请参阅图1,本实用新型实施例提供的一种医疗康复用手臂训练器,所述医疗康复用手臂训练器包括:
19.大臂杆1,其为两端连通的空心机构,用于使用者大臂穿入;转动机构2,其与大臂杆1一端固定连接,所述大臂杆1一端延伸至转动机构2内部,所述转动机构2上设置有可在其带动下转动的小臂杆3,小臂杆3为空心结构,用于使用者小臂穿入;压紧机构4,其设置有两个且分别安装在大臂杆1及小臂杆3上,压紧机构4动力输入端及输出端分别设置在大臂杆1及小臂杆3外部及内部,用于将使用者手臂压紧固定。
20.在进行手臂训练时,首先拉动大臂杆1和小臂杆3上的上的压紧机构4,使得大臂杆1和小臂杆3内的空间达到最大,这时,可将手臂从大臂杆1深入,使得手臂经转动机构2延伸至小臂杆3内,当小臂处于小臂杆3内,大臂处于大臂杆1内时,放松压紧机构4,在压紧机构4弹力作用下可将手臂压紧,防止在训练时,手臂脱离训练器,手臂压紧固定后,开启转动机构2,转动机构2可带动小臂杆3往复转动,从而可带动手臂往复转动训练,训练完成后,向上拉动压紧机构4,使得手臂放松,将手臂取出即可。
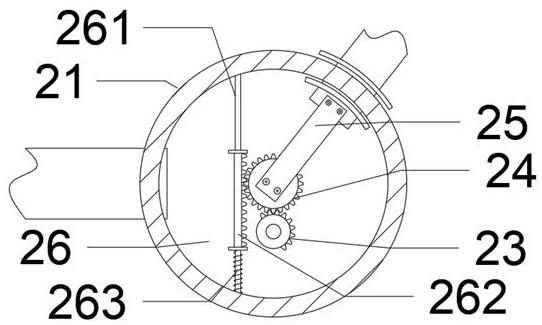
21.如图2和图3所示,作为本实用新型的一种优选实施例,所述转动机构2包括:轴套21,其内开设有空腔,所述大臂杆1延伸至轴套21内且与轴套21固定连接,所述轴套21上开设有供小臂杆3转动的通槽22,小臂杆3可在通槽22内转动;驱动齿轮23,其转动安装在轴套21内且为不完全齿轮,所述驱动齿轮23啮合有安装在轴套21中部的从动齿轮24,从动齿轮24为完全齿轮,驱动齿轮23可带动从动齿轮24间歇转动;转杆25,一端与从动齿轮24固定连接,所述转杆25另一端与小臂杆3设置在轴套21内的一端固定连接,转杆25可带动小臂杆3转动;复位组件26,其两端固定设置在轴套21内壁上,用于拉动转杆25反向转动复位。
22.在进行手臂训练时,开启驱动齿轮23,驱动齿轮23的动力来源为电机,驱动齿轮23和从动齿轮24啮合时,驱动齿轮23可带动从动齿轮24转动,从动齿轮24转动可通过转杆25
带动小臂杆3转动,小臂杆3转动即可对手臂进行训练,此时,复位组件26具有复位弹力,当驱动齿轮23和从动齿轮24不再啮合时,在复位组件26的推动下,从动齿轮24反向转动并通过转杆25带动小臂杆3反向转动复位,由此可对手臂进行反复训练。
23.如图2所示,作为本实用新型的一种优选实施例,所述复位组件26包括:导杆261,其两端和轴套21内壁固定连接,所述导杆261上套设有可在其上滑动的齿条262,齿条262与从动齿轮24铰接;第一弹性件263,两端分别与齿条262及轴套21内壁固定连接,用于拉动齿条262运动复位。
24.在进行手臂训练时,从动齿轮24转动可带动与其啮合的齿条262沿着导杆261向下运动并压缩第一弹性件263,第一弹性件263具体为电机,当从动齿轮24失去驱动齿轮23的动力后,在第一弹性件263的推动下,齿条262沿着导杆261向上运动并带动转杆25反向转动复位。
25.如图4所示,作为本实用新型的一种优选实施例,所述压紧机构4包括:压块41,其设置在大臂杆1内且分布在两侧,两侧压块41相互远离端和大臂杆1内壁之间固定设置有用于推动压块41向内侧运动的第二弹性件42;拉杆43,其一端与压块41固定连接,拉杆43另一端延伸至大臂杆1外且固定设置有拉把44,用于拉动一侧压块41向外侧移动;联动组件45,其分布在两侧且固定设置在大臂杆1内壁上,所述联动组件45同时与两侧压块41铰接,用于拉动两侧压块41做同步相向运动。
26.在训练之前,向上拉动拉把44,拉把44带动拉杆43向上运动,拉杆43向上运动可带动上侧的压块41向上运动并压缩上侧的第二弹性件42,第二弹性件42具体为弹簧,同时,在联动组件45的带动下,下侧的压块41向下运动并压缩下侧的第二弹性件42,当手臂放入后,放松拉把44,在第二弹性件42的推动下,两侧的压块41可做相互接近运动复位并将手臂压紧固定,便于进行训练。
27.如图4所示,作为本实用新型的一种优选实施例,所述联动组件45包括:滑杆451,固定设置在大臂杆1内壁上,滑杆451套设有可在其上滑动的滑块452,滑杆451及滑块452设置在两侧压块41之间;联动杆453,其两端分别与滑块452及压块41铰接,用于拉动两侧压块41同步运动。
28.上侧的压块41向上运动时,上侧的压块41可使得上侧的联动杆453拉动两侧的滑块452沿着滑杆451向内侧运动,两侧的滑块452做相互接近运动可使得下侧的联动杆453向下推动下侧的压块41,从而使得两侧的压块41做相互远离运动,即可将手臂放入。
29.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。