基于koapt疗法的膝关节退行性病变的治疗与康复器材
技术领域
1.本发明属于临床医疗器械技术和家用康复运动领域,具体地指一种基于koapt疗法的膝关节退行性病变的治疗与康复器材。
背景技术:
2.全球已进入老龄化社会,老年人口比例仍逐年增加,膝关节退行性病变已成为全球主要致残性疾病之一,严重影响老年人的生活质量。截止2018年底,据统计,我国六十五岁以上的老年人中,患膝关节疼痛的比例占60%以上,膝骨节炎病人达到了一亿以上,中国已是膝骨关节炎人数最多的国家之一。
3.膝关节是人体最复杂的支撑腿负重关节,也是最容易受到病损的关节之一。膝关节病变通常是由于下肢生物力线不正不稳、下肢废用性萎缩、长期工作生活体位不正确(如久坐长蹲)、长期下肢寒凉血供不足、关节腔内感染、关节腔内部组织源发性癌灶和转移继发性癌灶、内分泌失调骨质疏松、外源性高能量损伤等等原因所造成的关节炎、骨性关节炎、滑膜炎、髌骨软化、半月板损伤、软骨下骨硬化凸凹疏松塌陷囊性中空等等一系列关节腔内的各种组织病理生理形态变化。膝关节退行性病变(knee osteoarthritis,koa)又称增生性膝关节炎、老年性膝关节炎(俗称老寒腿),是一种最常见的慢性的、功能与形态退行性的关节疾病。最早、最主要的病理变化是软骨,然后是软骨下骨囊性病变、关节边缘骨赘形成,最终正常关节面完全破坏、畸形,从而导致疼痛增加、运动功能受限,甚至残废。
4.随着我国老龄化社会的到来,无论koa的发病率,还是患病的绝对数量都呈明显增长趋势。koa患者在生理上承担了巨大痛苦——患者在上下楼梯时膝盖会出现明显疼痛感和力不从心,长时间走路会觉得身体吃力、难受,严重患者甚至不能独自站立,必须倚靠支撑物站立;而长期病患不仅生活质量受到严重影响,同时也不可避免地承担着心理创伤。
5.现代临床医学对于koa患者在k-l(kellgren-lawrence)分级不同阶段提出了不同的治疗方案,在药物治疗方面,目前临床广泛应用的局部镇痛药物和全身镇痛药物都具有局限性,不能从病因上根本解决koa的病理生理病变基础,同时也不能阻止koa的进一步恶化,只能在极有限的时间内暂时缓解疼痛困扰,更不能解决肌力不足、肌肉萎缩以及诸如半月板囊肿、半月板破裂、软骨破裂脱落、前后交叉韧带撕裂、下肢生物力线不稳不正等等的器质性病变;当然长期使用还会有一系列的不良反应隐患;人工膝关节置换手术(tka、uka)是应用于koa临床k-l分级达到第四级的另一大类治疗方法,但这类手术属于破坏重建手术,损伤比较大,病人接受度低;同时膝关节置换手术后患者的膝关节周围肌力和下肢本体感受器的敏感性都不能达到正常生活运动的需求,特别是下肢的本体感受器全系统受到了破坏,以至于为未来在正常生活中不停地摔倒而埋下了绵绵无绝期的祸患。其他治疗方案如减轻体重、佩戴外骨骼、关节腔内透明质酸钠注射、自体富血小板血浆(prp)注射、关节腔内臭氧注射治疗等等,其疗效仅限于短期控制局部症状以及有限减缓功能下降的速度,长期和全系统来看都有很大的局限性,且不能从根本上解决膝关节疼痛,也不能够为膝关节周围提供足够的肌力支持,也无法恢复患者良好的自主运动本体感受,以及无法达到随时
随地无痛无损全系统的高效率治疗。
6.在《中国骨关节炎疼痛管理临床实践指南(中华骨科杂志2020年版)》中已经将运动疗法作为治疗koa的1a(强推荐最高级别)选择;而早在中国西汉时期的《引书》中就提出了“引膝痛”的导引处方:“引膝痛,右膝痛,左手拘权,内挥右足,千而已,左膝痛,右手拘权,而力挥左足,千而已。左手勾左足趾,后引之,十而已。又以左手据权,右手勾右足趾,后引之,十而已。”让患者做甩腿动作,通过腿部肌肉收缩和舒张促进腿部血液循环,以甩腿运动产生热量祛除小腿发凉疼痛的症状,是以“活血化瘀,温经散寒”为之功效原理。引膝痛治疗膝关节退行性病变是行之有效的经典疗法,甩腿可以有效治疗膝关节疼痛,但是在现代实际临床应用中的绝大多数koa病患者并没有从根本上受益,其原因如下:
7.1、从精神上而言:因为运动单调,患者精神上心情烦躁,不能对引膝痛运动产生持续地依从;
8.2、从肉体上来说:单腿支撑,单腿甩动,每天左右各1000次以上,在初次治疗接触阶段就产生了生理机能上的痛苦和拒绝,很难形成习惯性耐受和日常医嘱处方式遵从,进而导致引膝痛治疗的中断失败。
9.3、从现代循证医学原理上来讲:虽然引膝痛临床疗效得到了两千年来的病患认可,但其科学原理并不清晰,动作标准并不明确;引膝痛无法完全令人信服地成为现代临床医生的koa诊疗标准方案。
10.目前世界上还没有一种从系统性价比以及病理生理基础上根本性解决koa病痛的治疗方法和产品能够全面超越引膝痛。本发明的研究人员长年致力于koa诊疗方法的研究,提出了基于k-l分级的kkoa阶梯疗法(kill knee osteoarthritis,kkoa)和特定病程阶段的koapt现代标准甩腿疗法(knee osteoarthritis pendulum therapy,koapt);koapt与引膝痛之间的普遍性和特殊性关系是:koapt和引膝痛都是通过甩腿来达到治疗koa的目的;而相对于引膝痛粗略的治疗方法描述,koapt是专门将甩腿治疗koa的方法从koa患者疼痛症状合并膝关节周围肌无力症状倒推到纠正koa病理基础的更精确、更规范的持续康复治疗方法。koapt可以引起膝关节腔内压力下降,进而促进膝关节腔内血液循环、关节滑液循环、关节腔内外相关组织的新陈代谢增强,同时也并行不悖地高效率地锻炼到了腿部前后屈伸肌群的肌力,以及大大提升了下肢本体感受器的灵敏性。
11.目前此科学发现的第一人为本发明的发明人本人,该科学发现将初次发表于英国《trails》医学杂志。
12.因此,亟需一种能够实现koapt治疗方法的膝关节退行性病变的治疗与康复器材。
技术实现要素:
13.针对现有技术的不足之处,本发明提出一种基于koapt疗法的膝关节退行性病变的治疗与康复器材,规范督促使用者按照koapt标准动作来进行甩腿运动,帮助koa患者克服治疗过程中生理心理机体上的痛苦和不依从,通过持续规范、长久重复的koapt运动来从根本上解决患者koa病痛,为世界上膝关节退行性病变患者带来福音。
14.为达到上述目的,本发明所设计的一种膝关节退行性病变的治疗与康复器材,其特殊之处在于:包括正舒关系数据采集组件、运动量采集组件、运动支撑组件、控制组件和反馈组件;
15.所述运动支撑组件:用于为用户提供躯干支撑和/或腰部支撑和/或肘部支撑;
16.所述正舒关系数据采集组件:安装于运动支撑组件上,用于采集用户使用状态下的正舒关系数据;所述正舒关系为koapt疗法要求的正确而舒适的身体结构运动形态数据关系,所述正舒关系数据包括舒适支撑高度、支撑腿承重减重、躯干直立状态值和腿部直立状态值;
17.所述运动量采集组件:安装于运动支撑组件上,用于实时采集用户使用状态下的甩腿的运动量数据;所述运动量数据包括甩腿运动的运动次数、运动频率和运动幅度;
18.所述控制组件:用于执行部署于控制装置内的koapt计算机程序,实时采集用户使用状态下的正舒关系数据,实时判断用户运动过程中舒适支撑高度、支撑腿承重减重、躯干直立状态值和腿部直立状态值是否符合用户正舒关系预设值,在用户正舒关系不合格时通过输出反馈指令控制反馈组件输出相对应的反馈信息引导用户纠正运动姿态;实时采集用户的运动量数据,引导用户按照阶梯分级治疗模型完成治疗于康复训练;
19.所述反馈组件:用于根据控制指令向用户发出音频和/或视频和/或触感信号。
20.进一步地,所述koapt计算机程序包括阶梯分级治疗模型存储模块、正舒关系分析模块、治疗过程控制模块、治疗跟踪模块、反馈信息存储模块和用户信息存储模块;
21.所述阶梯分级治疗模型存储模块:用于存储阶梯分级治疗模型;
22.所述正舒关系分析模块:用于将实时采集的正舒关系数据输入正舒关系分析模型,实时判断用户姿态信息,输出正舒关系判断指令,当用户正舒关系不合格时同时输出不合格标志位;
23.所述治疗过程控制模块:用于根据正舒关系判断指令调用反馈信息存储模块中对应的反馈指令,将所述运动量采集组件采集的运动次数、运动频率和运动幅度与治疗模型的对应值进行匹配,根据匹配结果调用反馈信息存储模块中对应的反馈指令;
24.所述治疗跟踪模块:用于监控用户治疗过程控制的完成进度,调用反馈信息存储模块中对应的反馈指令;
25.所述反馈信息存储模块中包括计数达标反馈信息、正舒关系达标反馈信息、激励反馈信息、分离报警信息、媒体信息;
26.所述用户信息存储模块:用于存储用户的个人信息、正舒关系数据、运动量数据。
27.更进一步地,所述正舒关系分析模型为y=k1+k2+k3+k4+k5,式中,y为用户正舒关系标志值,k1为身直标志位,k2为腿直标志位,k3为支撑腿负重减轻标志位,k4为舒适度标志位,k5为冗余标志位,y=0时用户正舒关系合格,y=1时用户正舒关系不合格。
28.更进一步地,所述舒适度标志位的计算方法为k4=round(αq+βs+γt+δn),式中,q为两侧舒适支撑高度/身高比,s为两侧支撑时支撑腿承重减重/体重比、t为胸前舒适支撑高度/身高比、n为胸前支撑时的支撑腿承重减重/体重比,α、β、γ、δ分别为模型参数,通过参数标定得到,根据用户体型数据预先设置,round()表示四舍五入。
29.更进一步地,所述阶梯分级治疗模型为x1级治疗模型、x2级治疗模型、x3级治疗模型,每个阶梯分级治疗模型设置阶梯时间段、单腿支撑次数t、运动幅度θ、运动频率ω、腿部助力f、运动量c、支撑腿必须休息时间t、支撑腿负重减轻δa的范围区间。
30.在本发明的一种实施方式中,所述运动支撑组件包括折叠摆腿器、多功能支撑架,所述折叠摆腿器用于支撑用户躯干,所述多功能支撑架用于支撑用户肘部,两者固定卡接。
31.可选地,所述折叠摆腿器包括外壳、脚踏、折叠伸缩架、电机、摆动角架和小腿长度调整架,
32.所述外壳为底部支撑,两个脚踏安装在所述外壳上,位于外壳上方垂直设立的两个折叠伸缩架通过外壳连杆固定,两个摆动角架的上端分别悬挂在折叠伸缩架上,相对摆动角架前后摆动,两个摆动角架的下端插入小腿长度调整架固定为一个整体,所述电机设置于摆动角架上端,带动摆动角架和小腿长度调整架绕端部做钟摆运动;
33.所述控制组件被配置为能够基于阶梯分级治疗模型的设定对所述电机进行控制,以驱动所述摆动角架转动。
34.可选地,所述多功能支撑架包括支撑底座、两个支撑杆和两个手肘腋下两用支撑托;所述支撑底座位于底部,上方对称设有两个支撑杆,所述支撑杆通过凸轮压柄与支撑调整杆连接,所述支撑调整杆下方设有加强腹板,所述手肘腋下两用支撑托水平设置于支撑调整杆的顶部。
35.可选地,所述小腿长度调整架包括u型管架、导杆、第一滑块,小腿长度调整架通过型管架两侧的管体分别与两根摆动角架插接连接,安装在第一滑块上的脚托板沿导杆的长度方向在u型管架上滑动已调整与u型管架的相对位置,以适应不同身高的用户的腿长。
36.优选地,所述治疗与康复器材还包括终端支撑架,用于支撑和调整显示屏的高度、角度。
37.一种可选的方式为,两个折叠伸缩架的顶端分别设置有翻转折叠座,两个翻转折叠座之间通过齿轮箱和联轴器连接。
38.另一种可选的方式为,所述折叠伸缩架的顶端设置有翻转折叠座,所述翻转折叠座与折叠伸缩架的上端转动铰接。
39.可选地,所述正舒关系数据采集组件包括第一传感器组、第二传感器组、第三传感器组,用于采集用户使用状态下的正舒关系数据,所述运动量采集组件包括第四传感器组用于采集用户使用状态下的运动量数据。
40.可选地,所述第一传感器组为分别设置于运动支撑组件上脚踏的前方和后方的光电传感器,光电传感器的接收端分别垂直设置于两个发射端的上方;用户进行甩腿运动时,当接收端接收到光电信号时,信号未被用户遮挡,输出躯干直立状态值为0,k1=0,当接收端未接收到光电信号时,信号被用户遮挡,输出躯干直立状态值为1,k1=1。
41.可选地,所述第二传感器组包括设置于小腿长度调整架上与用户膝盖后部对应处的位移传感器,位移传感器实时采集用户腿部与小腿长度调整架的贴合状态,贴合时输出腿部直立状态值为0,k2=0,未贴合时输出腿部直立状态值为1,k2=1。
42.可选地,所述第三传感器组包括设置于运动支撑组件的脚踏下方的重量传感器,以实时采集用户的体重数据,计算支撑腿负重减轻标志位的方法为:两侧支撑时支撑腿承重减重/体重比s或者胸前支撑时的支撑腿承重减重/体重比n是否在分级治疗模型中支撑腿负重减轻δa的范围内,是则输出k3=0,否则输出k3=1。
43.可选地,所述第四传感器组设置于多功能支撑架前部的距离传感器和外壳侧面的光电传感器,运动量数据中运动幅度的采集方法为:在运动支撑组件的底部支撑上表面设置距离传感器,运动幅度θ=arctan(d/(h-l)),式中,h为用户腿部支点到底部支撑上表面的距离,l为距离传感器与被遮挡物之间的距离,d为距离传感器到用户腿部支点的投影距
离。
44.可选地,所述控制组件判断舒适度标志位为1时,控制反馈组件向用户发出音频和/或视频和/或触感信号引导用户调整腰部支撑和/或肘部支撑高度,或者控制腰部支撑和/或肘部支撑自动调整高度直至舒适度标志位为0。
45.可选地,所述正舒关系数据采集组件和运动量采集组件通过超声波传感器、位移传感器、重力传感器、光电传感器、雷达和/或摄像头实现。
46.koa(knee osteoarthritis)疾病在影像学检查中是用k-l(kellgren-lawrence,k-l)分级法来区分koa患者的病情轻重程度的,也是由k-l分级来确定不同的koa患者适用于不同的治疗方案;
47.附k-l分级:
48.1、0级:完全正常的关节;
49.2、ⅰ级:关节有稍微的骨质增生,但是关节间隙没有明显狭窄;
50.3、ⅱ级:已经出现关节间隙狭窄,以及骨质增生;
51.4、ⅲ级:中等程度的骨质增生,同时有明确的关节间隙狭窄,软骨下的骨头出现硬化,或者出现关节畸形,如向内翻、向外翻;
52.5、ⅳ级:可以看到大量骨赘,同时有严重关节间隙狭窄,明显出现骨硬化,同时关节畸形非常明显。
53.koa患者的常见生理状态是体重较重、膝关节周围的屈伸肌群(如股四头肌、腘绳肌
…
)萎缩无力、年龄多在45岁以上
…
54.koa患者的常见症状是膝关节运动疼痛、平地行走不稳、登高下楼无力、体形代偿性畸态
…
55.koa患者机体的病理变化是膝关节软骨磨损退化变形甚至破裂缺损、膝关节间隙变窄、软骨下骨凸凹不平直至骨赘骨刺骨性囊肿增生、关节腔内滑液炎性因子增加、软骨及软骨下骨的碎屑甚至是关节鼠脱落沉积于关节腔内
……
56.而本发明正是基于koa病人以上各个病程阶段的种种内外状况和其特有的生理病理原因而研发的;进而依靠本发明来指导、督促、适时调整koa患者进行科学正确的koapt运动;并且同期同步地,koapt机器指导配合下的koapt运动治疗方法在koa患者的每个具体特定病程发展阶段中,与其他koa特定的治疗方法(比如关节镜下冲洗、清理、修补;下肢力线矫正术;uka、tka术后的下肢肌力康复训练
…
)形成必要阶梯性的、拼盘联合的全系统治疗方案亦即kkoa(kill knee osteoarthritis,kkoa)治疗方案。
57.关于本次koapt机器的发明,我们是既往三年来在依据《引膝痛导引术》的大概规定动作上,严谨地基于病理生理学和康复运动学来从广大koa患者群的临床研究发现以及动物实验发现:
58.1,koapt运动时——膝关节腔内的压力下降,继而膝关节腔内各相关组织的血液循环加快,继而对关节腔内的炎性疼痛因子清除效率增大和组织修复能力加强;膝关节内外挛缩的相关肌腱与韧带组织渐次松解,关节间隙增大;软骨下骨的压力减轻,而软骨下骨上有丰富的神经末梢——koa的疼痛大大减少了;
59.2,koapt运动能够在koa患者疼痛最大程度减少的情况下循序渐进确实有效地提高了膝关节周围维持正常运动的相关屈伸肌肉群体的肌力,并且直至达到了正常的生活必
须肌力!
60.3,每天左右各一千次以上的甩腿,天天坚持,一年以上,对减轻体重负担是正向积极的作用;而体重增长和疏于正确的下肢肌肉运动正是koa发生发展的主要劣因;体重越来越大,膝关节就越疼,膝关节运动就越不主动越来越逃避
…
恶性循环周而复始;而在koapt机器指导督促下的koapt运动正是打消此恶性因果循环的利器!
61.从现代循证医学理论和近五年来的临床实践观察证明,引膝痛没有科学地规定支撑腿的持续支撑时间限度;而长时间的单腿支撑会造成支撑腿的软骨下骨缺血性、压迫性病变,进而使支撑腿疼痛、功能退变加速;甩动腿的甩动幅度和频率也并没有得到最大值到最小值范围的科学验证和限制;整体甩动过程中身体体型重力线、头颈仰俯角度、双臂支撑高度、患者体力强弱、高矮胖瘦、年龄等个体差异都没有达到相得益彰、并行不悖的共性原理原则与实际患者个性诊疗之间的有机统一。与现有技术相比,本发明有益的技术效果体现在:
62.(1)koa患者连续两周内不做引膝痛训练,那么关节腔内的压力就会升高,继而会引起关节组织内血液循环和关节腔内滑液循环的降低,于是关节滑液减少,疼痛又会开始,本发明就是能够让使用者持续不断地进行koapt训练;
63.(2)本发明通过正舒关系系统来实现对koapt运动姿势的监督、校正和反馈提醒,以达到规范使用者的正确舒适运动姿态,主动帮助患者克服运动中肉体上的痛苦和心理上不依从的目的;
64.(3)本发明从多个维度设计反馈信息,解决运动单调造成患者精神上心情烦躁的问题,使患者对引膝痛训练入情、入定,解放双手,可同时进行办公和对外交流;
65.(4)本发明具有不同款型的外部结构,适用于医疗机构、家居生活、旅行出差等不同环境,整体结构小,稳定性牢靠,方便患者长期使用。
附图说明
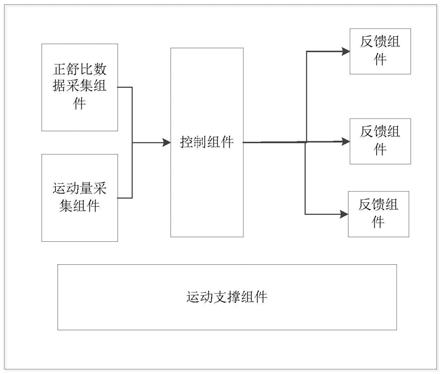
66.图1为本发明基于koapt疗法的膝关节退行性病变的治疗与康复器材的系统结构框图。
67.图2为koapt计算机程序的系统架构图。
68.图3和图4为治疗过程控制模块的工作流程图。
69.图5为整机工作状态时的右侧视图。
70.图6为多功能支撑架的装配结构示意图。
71.图7为多功能支撑架的零件分散示意图。
72.图8为折叠摆腿器部分工作时的左侧视图。
73.图9为小腿长度调整架的装配结构示意图。
74.图10为折叠摆腿器的组合原理示意图。
75.图11为两驱版折叠摆腿器的原理结构示意图。
76.图12为折叠摆腿器和多功能支撑调整器的折叠伸缩原理示意图。
77.图13为折叠摆腿器折叠状态示意图。
78.图14为带翻转折叠座的两驱版折叠摆腿器的原理结构示意图。
79.图15为带翻转折叠座的折叠摆腿器的原理结构示意图。
80.图16为光电传感器的安装方位左侧视图。
81.图17为光电传感器的安装方位俯视图。
82.图18为tof传感器的安装方位示意图。
83.图19为摄像头安装方位示意图。
84.图20为距离传感器安装方位示意图及角度计算原理示意图。
85.图21为多功能支撑调整器的工作原理示意图。
86.图22为终端支撑架的结构示意图。
87.图中,
88.1、折叠摆腿器;1a、转轴;11、外壳;11a、转轴孔;11b、长条孔、12、脚踏;12a;按摩凸点;12b、防滑凸起;13、折叠伸缩架;14、电机;15、摆动角架;16、小腿长度调整架;17、齿轮箱;18、联轴器;19、压柄;121、脚踏面;131、伸缩杆;132、折叠架;132a、连杆转轴;133、外壳连杆;151、第一杆体;152、第二杆体;153、第一加强腹板;161、u型管架;162a、第一固定块;162b、第二固定块;163a、第二滑块;163b、第三滑块;164、导杆;165、第一滑块;165a、脚托板;165b、托板连杆;165c、锁止机构;164a、第一导向孔;
89.2、多功能支撑架;21、支撑底座;22、支撑杆;23、凸轮锁紧圈;24、支撑调整杆;25、支撑托锁紧圈;26、手肘腋下两用支撑托;211、导轨安装固定孔;212、支撑杆固定孔;241、第三杆体;242、第四杆体;243、第二加强腹板;
90.3、多功能支撑调整器;31、第一导轨;32、第二导轨
91.4、终端支撑架;41、直管架;42、旋转u型管架;43、遥控器安装座、44、万向调整支架;
92.5、显示器;
93.61、第一传感器组;62、第二传感器组;63、第三传感器组;64、第四传感器组。
94.10、翻转折叠座。
具体实施方式
95.以下结合附图和具体实施例对本发明作进一步的详细描述。
96.本发明提出的基于koapt疗法的膝关节退行性病变的治疗与康复器材,如图1所示,包括正舒关系数据采集组件、运动量采集组件、运动支撑组件、控制组件和反馈组件。
97.运动支撑组件:用于为用户提供躯干支撑和/或腰部支撑和/或肘部支撑。运动支撑组件根据不同的用户对象和适用场景设计有不同款型的外部结构,本发明实施例中提出折叠式组件的结构,但支撑组件的其他实施方式不受此限制,在系统工作时能够为用户提供躯干支撑和/或腰部支撑和/或肘部支撑的装置均属于本发明所述的运动支撑组件。
98.正舒关系数据采集组件:安装于运动支撑组件上,用于采集用户使用状态下的正舒关系数据;正舒关系——koapt疗法要求的正确而舒适的身体结构运动形态数据关系,正舒关系数据包括用户身高、肘部支撑点与踏点距离、两侧支撑高度、胸前支撑高度、用户体重、两侧支撑体重、胸前支撑体重、躯干直立状态、腿部直立状态等。
99.运动量采集组件:安装于运动支撑组件上,用于实时采集用户使用状态下的甩腿的运动量数据;运动量数据包括甩腿运动的运动次数、运动频率和运动幅度。
100.控制组件:用于执行部署于控制装置内的koapt计算机程序,实时采集用户使用状
态下的正舒关系数据,实时判断用户运动过程中舒适支撑高度、支撑腿承重减重、躯干直立状态值和腿部直立状态值是否符合用户正舒关系预设值,在用户正舒关系不合格时通过输出反馈指令控制反馈组件输出相对应的反馈信息引导用户纠正运动姿态;实时采集用户的运动量数据,引导用户按照阶梯分级治疗模型完成治疗于康复训练。控制组件包括控制装置、通信模块、电源模块等,通信模块可以采用wifi、无线蓝牙等传输方式。控制装置可以设置于运动支撑组件上,通过人机互动式显示屏与用户对话,亦可远程设置于服务器上,通过移动装置与用户通信,或服务器向设置于运动支撑组件上的反馈组件直接发送控制指令。
101.反馈组件:用于根据控制指令向用户发出音频和/或视频和/或触感信号。反馈组件可以是安装与运动支撑组件上的显示屏、扬声器、按摩头、电机等,根据控制指令发出图像信息、声音信息、按摩振动或者驱动支撑组件运动等。反馈组件也可以整合于移动装置上,由移动装置根据控制指令发出图像信息、声音信息等。
102.koapt计算机程序的结构框图如图2所示,包括分级模型存储模块、正舒关系分析模块、治疗过程控制模块、治疗跟踪模块、反馈信息存储模块和用户信息存储模块。
103.阶梯分级模型存储模块:用于存储阶梯分级治疗模型;正舒关系分析模块:用于将实时采集的正舒关系数据输入正舒关系分析模型,实时判断用户姿态信息,输出正舒关系判断指令,当用户正舒关系不合格时同时输出不合格标志位;治疗过程控制模块:用于根据正舒关系判断指令调用反馈信息存储模块中对应的反馈指令,将运动量采集组件采集的运动次数、运动频率和运动幅度与阶梯分级治疗模型的对应值进行匹配,根据匹配结果调用反馈信息存储模块中对应的反馈指令;治疗跟踪模块:用于监控用户治疗过程控制的完成进度,调用反馈信息存储模块中对应的反馈指令;反馈信息存储模块中包括计数达标反馈信息、正舒关系达标反馈信息、激励反馈信息、分离报警信息、媒体信息;用户信息存储模块:用于存储用户的个人信息、正舒关系数据、运动量数据。
104.阶梯分级治疗模型包括x1级治疗模型、x2级治疗模型、x3级治疗模型,每个治疗模型设置阶梯时间段、单腿支撑次数t、运动幅度θ、运动频率ω、腿部助力f、运动量c、支撑腿必须休息时间t、支撑腿负重减轻δa的范围区间。阶梯分级治疗模型的参数如表1所示,例如,x1级治疗模型,该模型适用于肥胖bmi大于28,不愿主动运动的人,膝关节中重度疼痛,k-l分级3级及以上,在0~8周内,对甩动腿进行补力,单腿支撑次数t为50次、运动幅度θ—30~+30
°
,运动频率ω为每分钟30次,支撑组件驱动电机提供腿部助力f,运动量c为500次,支撑腿必须休息时间为1min以上,支撑腿负重减轻δa为≥20%。支撑腿负重减轻δa以用户体重为参照值。
105.阶梯分级治疗模型可根据用户输入的个人信息或医生运动处方匹配相应的治疗模型。表1是根据临床需求设置的阶梯分级治疗模型各项临床对应指标。
106.表1
107.[0108][0109]
基于一般的koa患者都是可以在甩动角度绝对值区间60
°
(
±
30
°
)以上顺利完成koapt运动的。在患者肌肉萎缩、肌力下降、体重肥胖的情况下,我们在临床试验中测得如果koapt运动角度区间小于60
°
(
±
30
°
),则对提高膝关节屈伸肌力的效率太低;而且关节腔内的压力下降也微乎其微——实验测得一般平均只有5mm水柱以下,而如此微小的压力下降对促使关节腔内各组织血液循环的增加是微乎其微的,同时对各挛缩的联接组织(如前后交叉韧带、内外侧副韧带、髌腱...)的松解效率也是很低的。
[0110]
而当koapt运动的甩动角度在绝对值区间60
°
(
±
30
°
)以上时,膝关节腔内的压力下降值平均在15mm水柱以上。如此显而可见——绝对运动区间角度在60
°
(
±
30
°
)以上时koapt对koa膝关节止痛、修复和相关肌群力量的提高是有显著意义的。
[0111]
在甩动过程中,将支撑腿负重减轻20%以上(也是本发明的重点之一)——koa患者支撑腿膝关节腔内的压力通过体重减轻而直接下降了,其临床意义已经在传统的koa运动疗法,诸如游泳、仰卧朝天蹬、引膝痛二...等等的大数据治疗效果统计中得到过有效验证;而koapt是所有这些koa的运动疗法中最简单、舒适、高效率、可坚持的。
[0112]
膝关节腔内的压力会因体重增加而增加,也因此会加重膝关节软骨和软骨下骨的退行性病变;而在koapt运动时,我们测得支撑腿关节所承受的压力值会达到正常状态下的四倍——koapt运动的单次持续甩动次数,应该根据koa的k-l分级和患者实时实地的体重和肌力状态而进行阶段性的限制,比如koapt第一阶段0-8周的单腿单次持续甩动为50个回合时,支撑腿并没有任何不适症状反应;相反,我们测得koapt第一阶段0-8周的单腿单次持续甩动为100个回合以上时,患者的支撑腿膝关节出现了隐痛和日常生活的间歇性跛行症状。
[0113]
koapt要想实际完全达到治疗目标,必须务实地从骨科医学专业角度和实施中的社会人文环境相结合来认真工作——在此前提下制定了上述各项koapt具体运动动作和运动数量的全系统列表。
[0114]
正舒关系分析模块:用于将实时采集的正舒关系数据输入正舒关系分析模型,实时判断用户姿态信息,输出正舒关系判断指令;正舒关系调整:用户站上康复器材,输入用户个人信息(性别、年龄、身高、体重、面部信息数据、k-l分级、疼痛指标、医生运动处方、用户自我指定的监督者联系信息等),控制系统导入对应的阶梯分级治疗模型,测量用户身
高、体重(或输入),控制系统根据身高体重计算肘部高度、大腿、小腿长度,系统自动调整肘部支撑高度、大腿、小腿支撑长度,用户确认或微调至满意存储。
[0115]
正舒关系分析模型为y=k1+k2+k3+k4+k5,式中,y为用户正舒关系标志值,k1为身直标志位,k2为腿直标志位,k3为支撑腿负重减轻标志位,k4为舒适度标志位,k5为冗余标志位,y=0时用户正舒关系合格,y=1时用户正舒关系不合格。
[0116]
身直标志位k1的计算方法为:当运动量采集组件采集的躯干直立状态值为0时k1=0,当躯干直立状态值为1时k1=1。腿直标志位k2的计算方法为:当正舒关系数据采集组件采集的腿直状态值为0时k2=0,当腿直状态值为1时k2=1。支撑腿负重减轻标志位k3的计算方法为:判断两侧支撑时支撑腿负重减重/体重比s或者胸前支撑时的支撑腿负重减重/体重比n是否在阶梯分级治疗模型中支撑腿负重减轻δa的范围内,是则输出k3=0,否则输出k3=1;舒适度标志位的计算方法为k4=round(αq+βs+γt+δn),式中,q为两侧舒适支撑高度/身高比,s为两侧支撑时支撑腿承重减重/体重比、t为胸前舒适支撑高度/身高比、n为胸前支撑时的支撑腿承重减重/体重比,α、β、γ、δ分别为模型参数,根据用户体型数据预先设置,round()表示四舍五入。冗余标志位k5为预留标志位,默认值为0。
[0117]
两侧支撑时支撑腿承重减重/体重比s是指用户将手臂从侧面支撑于肘部支撑上,从而采集的体重减少量与体重的比值;胸前支撑时的支撑腿承重减重/体重比n是指用户将手臂在胸前支撑于肘部支撑上,从而采集的体重减少量与体重的比值;不同治疗模型中支撑腿负重减轻δa的要求不同,调整肘部支撑高度或者用户支撑姿势可以使s、n的值满足δa的相应范围,体重采集通过设置于躯干支撑组件上的重力传感器实现。
[0118]
两侧舒适支撑高度/身高比q是指用户在手臂从两侧支撑于肘部支撑上,肘部支撑与用户身高的比值;胸前舒适支撑高度/身高比t是指用户在胸前支撑状态下肘部支撑与用户身高的比值,用户身高可以通过输入方式获得,也可以通过传感器采集。肘部支撑的高度可以通过用户手动调整或通过电机驱动,自动调节。
[0119]
舒适度标志位可根据用户输入的个人信息或成年人人体惯性参数计算得到,肘部支撑点的高度与肩高度比例在0.79-0.91之间;肘部支撑点的高度与身高比例在0.65-0.75之间;舒适踏点与肘部支撑点处矢状面距离在29-45cm之间,集中在35cm左右,踏点与肘部支撑点矢状面距离与上臂长度的比例在0.9-1.4之间,以1.1-1.3居多。两侧舒适支撑高度与身高比例q的数值在0.62-0.67之间,胸前舒适支撑高度与身高比例t的数值在0.64-0.70之间。与“动态摆腿时的位置”分析数据基本一致(肘部支撑点的高度与身高比例0.65-0.75)。无论是静态站立或者动态摆腿,被测试者皆反馈两侧支撑要比胸前支撑更加舒适,而且更好借力。静态支撑时的称重数值基本在动态摆腿时称重数值范围内。用户两侧支撑时的最大减重与体重的比例在0.10-0.66之间,最小减重与体重的比例在0.08-0.36之间;用户胸前支撑时的最大减重与体重的比例在0.03-0.49之间,最小减重与体重的比例在0-0.22之间。模型参数α、β、γ、δ的值根据s、n、q、t的值标定调整,使得在用户舒适且满足支撑腿负重减轻约束的条件下k4=0;用户不舒适或者不能满足支撑腿负重减轻约束的条件下k4=1;本实施例中采用的舒适度标志位的计算公式为k4=round(0.25q+0.28s+0.15t+0.18n)。
[0120]
治疗过程控制模块将运动量采集组件采集的运动次数、运动频率和运动幅度与治疗模型的对应值进行匹配,根据匹配结果调用反馈信息存储模块中对应的反馈指令;当用
户使用状态下的正舒关系数据符合正舒关系分析模型时记录一次有效运动并触发相应的反馈信息,当运动量数据符合治疗模型规定时触发相应的反馈信息;当有效运动数量的运动量数据符合用户治疗模型时触发相应的反馈信息,引导用户每日完成治疗模型规定的治疗与康复训练;当用户完成一个阶段的治疗与康复训练后,治疗过程控制模块导入下一个阶段的阶梯分级治疗模型。反馈指令包括计数达标反馈信息、正舒关系达标反馈信息、激励反馈信息、分离报警信息、媒体信息。分离报警信息为人机分离报警及组件分离报警。人机分离报警用于提醒用户到期运动的报警信息,包括按照预设时间发出报警信息,根据分离时长按照不同设定播报报警信息。组件分离报警为不同组件分离放置位置太远后发出相关警报,避免部分组件的丢失。多媒体信息为帮助用户解除烦躁情绪的多媒体信息,包括但不限于音乐、视频、网络信息、视频通话、主播聊天室等。
[0121]
治疗过程控制模块的工作流程如图3和图4所示,其中训练前预处理的步骤包括:
[0122]
1)核对用户身份信息,引导用户登录账户或创建账户,调用用户信息存储模块中的用户治疗信息和治疗跟踪模块中对应用户的完成进度信息,选择调用治疗模型存储模块中的对应膝关节退行性病变的治疗模型;
[0123]
2)正舒关系分析模块根据用户信息存储模块中舒适支撑高度和支撑减重数据,引导用户调整运动支撑组件中肘部支撑高度、小腿长度调整架的长度,对于新用户根据用户生理信息将运动支撑组件中肘部支撑高度、小腿长度调整架的长度调至使用舒适位置。
[0124]
3)引导用户在舒适状态下开始训练。
[0125]
训练阶段的步骤包括:
[0126]
1)正舒关系数据采集组件采集正舒关系数据、运动量采集组件采集运动量数据输入至正舒关系分析模型,正舒关系分析模型根据正舒关系数据计算用户运动姿势,当正舒关系标志值为1时,输出对应标志位的反馈指令,通过显示器显示相对应位置,并显示正确姿势画面。
[0127]
直立标志位k1为1,输出语音信息“请站直”;腿直标志位k2为1,输出语音信息“腿不直哦,请伸直腿甩动”;支撑腿负重减轻标志位为1,输出语音信息“腿部压力太大,请将肘部支撑负重调整”;舒适度标志位k4为1,输出语音信息“是不是站得不舒服?请调整站姿”,通过对错误部位进行震动提示等方式提醒用户整改。
[0128]
2)实时采集和记录用户运动量数据和/运动姿态数据,调用反馈信息存储模块中的反馈指令引导用户完成标准化运动;当单腿支撑次数t达标时输出语音信息“请换腿”或“支撑腿需要休息了”;当休息时间不及支撑腿必须休息时间t时,输出“支撑腿需要休息,请稍候”;运动幅度φ未达标时,输出语音信息“甩腿幅度不够”;运动次数满百时输出激励反馈信息,激励反馈信息包括语音信息和脚底按摩启动。
[0129]
3)运动过程控制模块将采集到的运动量数据与对应治疗模型中的数据匹配比对,直至用户运动量数据符合治疗模型规定范围。
[0130]
4)存储用户运动量数据和/或运动姿态数据,更新用户治疗信息和治疗跟踪模块中对应用户的完成进度信息,调用反馈信息存储模块中的反馈指令引导用户结束流程。
[0131]
可选地,运动支撑组件包括折叠摆腿器1、多功能支撑架2、多功能支撑调整器3、终端支撑架4、显示器5,正舒关系数据采集组件、运动量数据采集组件设置于运动支撑组件上,控制组件集成于显示器5内,如图5至图13,以及图16至图18所示。多功能支撑架2用于支
撑用户肘部,且与折叠摆腿器1固定连接。
[0132]
可选地,如图6、图7所示,多功能支撑架2包括支撑底座21、两个支撑杆22和两个手肘腋下两用支撑托26,两个支撑杆22和两个手肘腋下两用支撑托26一一对应,支撑底座21上具有用于与多功能支撑调整器3配合安装的导轨安装固定孔211和与支撑杆22连接的支撑杆固定孔212,两个支撑杆22的一端与支撑底座21通过支撑杆固定孔212固定连接且相对于支撑底座21的中线对称布置,手肘腋下两用支撑托26可转动地连接在对应的支撑杆22的另一端,手肘腋下两用支撑托26的转轴垂直于脚踏面121。示例性地,在本发明实施例中,用户在站立的进行腿部摆动训练的同时,可以将肘部或者腋下支撑在两个条形的手肘腋下两用支撑托26上以保证身体的平衡,减轻站立腿的支撑负担。手肘腋下两用支撑托26的一端与支撑杆22的一端转动连接,通过转动手肘腋下两用支撑托26,可以实现调整两个手肘腋下两用支撑托26之间的间距,适应不同用户的肩宽,进一步提高了用户的使用舒适度。
[0133]
可选地,治疗与康复器材还包括两个凸轮锁紧圈23和两个支撑调整杆24,两个支撑调整杆24与两个手肘腋下两用支撑托26一一对应,支撑调整杆24包括第三杆体241和第四杆体242,第三杆体241的一端与对应的手肘腋下两用支撑托26可转动连接,第三杆体241的另一端与第四杆体242的一端连接,第四杆体242的另一端与支撑杆22的另一端通过凸轮锁紧圈23可转动连接,第四杆体242的转轴垂直于脚踏面121,第三杆体241与第四杆体242呈直角或钝角布置,夹角之间设置第二加强腹板243,以增强稳定性。示例性地,在本发明实施例中,通过在手肘腋下两用支撑托26与支撑杆22支撑杆之间设置呈折杆状的支撑调整杆24。手肘腋下两用支撑托26通过支撑托锁紧圈25与第三杆体241转动连接并锁紧。在调整手肘腋下两用支撑托26相对于第三杆体241转动的同时,也可以进一步调整第四杆体242相对于支撑杆22进行转动,最终通过凸轮锁紧圈23进行锁紧固定。进一步提高了手肘腋下两用支撑托26的调整范围,适应用户不同的支撑需求,进一步提高了用户的使用舒适度。
[0134]
示例性地,在本发明实施例中,通过调节第四杆体242插接到支撑杆22中的深度,还可以适应性的调节手肘腋下两用支撑托26的整体高度,以适应不同用户的身高。
[0135]
如图8所示,折叠摆腿器1包括外壳11、脚踏板12、折叠伸缩架13、电机14、摆动角架15和小腿长度调整架16。脚踏板12安装在外壳11上,脚踏板12上具有供用户站立的脚踏面121。折叠伸缩架13和摆动角架15均呈杆状,折叠伸缩架13的一端与外壳11连接,折叠伸缩架13的另一端与摆动角架15的一端通过转轴1a铰接,转轴1a平行于脚踏面121。电机14安装在折叠伸缩架13的另一端且与转轴1a传动连接,电机14与控制组件电连接。摆动角架15的另一端与小腿长度调整架16连接,小腿长度调整架16上具有用于支撑脚部的脚托板165a。
[0136]
可选地,如图10所示,摆动角架15包括第一杆体151和第二杆体152,第一杆体151的一端与小腿长度调整架16连接,第一杆体151的另一端与第二杆体152的一端连接,第二杆体152的另一端与折叠伸缩架13的另一端铰接,第一杆体151和第二杆体152呈钝角布置。示例性地,在本发明实施例中,通过将摆动角架15设置为由具有钝角夹角的第一杆体151和第二杆体152组成,示例性地,该夹角范围为150
°
至160
°
,夹角之间设置第一加强腹板153,以增强稳定性。由于人体的大腿和小腿不可能始终保持完全伸直,第一杆体151和第二杆体152呈钝角布置能够更加贴合人体构型,减少摆动角架15与大腿内外侧的干涉,使用户在进行训练时髋关节尽量接近转轴1a的位置,提高用户的使用舒适度。
[0137]
示例性地,在本发明实施例中,折叠摆腿器1包括两根折叠伸缩架13、两根摆动角
架15,通过两套由摆动角架15和小腿长度调整架16组成的摆动结构共同带动小腿长度调整架16进行钟摆运动,提高了结构稳定性。
[0138]
示例性地,在本发明实施例中,采用电机14对对应的摆动角架15进行驱动的方式,存在稳定性较差的问题。如图11所示,可以在两个折叠伸缩架13的另一端与摆动角架15的铰接处分别增设两个齿轮箱17,并通过联轴器18将两个齿轮箱17的动力连接起来,联轴器18可以设置在连接于两个齿轮箱17之间的套管中,对旋转配合处进行隐藏保护。此时仅需要通过设置一个电机14对其中一个摆动角架15的铰接处与折叠伸缩架13铰接处的转轴1a进行驱动,电机14将动力传给一侧的齿轮箱17,并通过联轴器18在通过另一侧的齿轮箱17将动力传送到另一侧的摆动角架15上,两侧动力同步,达到左右两驱的目的,增强摆动角架15运动的稳定性,联轴器18向后移动,而摆动角架15的转动中心不动,这样可以进一步让摆动角架15的摆动轴心接近髋关节,进一步让摆动角架15的轨迹与腿部摆动轨迹拟合,提高康复运动过程的舒适度,保证腿部顺利流畅的前后摆动。
[0139]
可选地,如图9所示,小腿长度调整架16包括u型管架161、导杆164、第一滑块165,u型管架161与第一杆体151的一端可拆卸连接,导杆164设置在u型管架161上且平行于第一杆体151,第一滑块165上具有第一导向孔164a,第一滑块165可滑动地安装在u型管架161上且通过第一导向孔164a与导杆164配合连接,脚托板165a安装在第一滑块165上,第一滑块165上还具有用于与u型管架161固定连接的锁止机构165c。示例性地,如图10所示,在本发明实施例中,小腿长度支架16通过u型管架151两侧的管体分别与两根摆动角架15的第一杆体151插接连接。安装在第一滑块165上的脚托板165a可以沿导杆164的长度方向在u型管架161上滑动以调整与u型管架151的相对位置,以适应不同身高的用户的腿长。在调整到用户的舒适脚踏位置后,通过锁止机构165c将第一滑块165与u型管架161固定连接,完成脚托板165a位置的调整和固定。进一步提高了用户的使用舒适度。
[0140]
示例性地,在本发明实施例中,小腿长度调整架16上还可以包括第一固定块162a、第三滑块163b、第二固定块162b和第二滑块163a。其中第一固定块162a、第三滑块163b、第二固定块162b、第二滑块163a和第一滑块165沿导杆164的长度方向依次布置,且均通设置有导向孔与导杆164连接。其中第一固定块162a和第二固定块162b与u型管架151固定连接,第三滑块163b和第二滑块163a可以沿导杆164的长度方向相对于u型管架151进行相对滑动,以调整位置实现对用户腿肚的进行支撑,进一步提高用户的使用舒适度。
[0141]
图9中折叠摆腿器1的状态是最长状态,第一滑块165可以如箭头所示方向滑动,以调整适应小腿的长度,当第一滑块165顶到第二滑块163a时,第二滑块163a与第三滑块163b在连杆的作用下相向而行。滑块和固定块作为腿肚的支撑。第一滑块165上有锁止机构165c,第一滑块165在u型管架上滑动到用户舒适位置,通过锁止机构165c进行锁定。
[0142]
示例性地,在本发明实施例中,还可以设置托板连杆165b对脚托板165a与第一滑块165进行连接,如图7、图8、图9所示。其中托板连杆165b的一端与脚托板165a通过扭转弹簧转动连接,托板连杆165b的另一端与第一滑块165通过扭转弹簧转动连接,托板连杆165b两端的转轴均与转轴1a平行。脚托板165a受到脚掌蹬力后会自然撑开。脚托板165a与第一滑块165采用上述双弹性转轴的设计,由于人体髋部转动中心和摆动角架的转动中心不可能完全同轴,在摆动过程中脚部轨迹和小腿支架摆动轨迹有偏差。采用该结构连接的脚托板165a可以根据摆动过程中脚部轨迹进行实时转动,以免因为轨迹不完全同步造成对脚部
的挤压和拉扯。在训练完成后,脚托板165a也可以在扭簧的作用下复位,进一步提高了用户的使用舒适度。
[0143]
示例性地,在本发明实施例中,如图10和12所示,折叠伸缩架13可以包括伸缩杆131、折叠架132和外壳连杆133。由图12的a方位视图可知,伸缩杆131的一端通过转轴1a与摆动角架15铰接,伸缩杆131的另一端可伸缩的插接于杆状的折叠架132中。外壳11上设置有与外壳连杆133连接的转轴孔11a,该转轴孔11a的轴线平行于转轴1a,外壳连杆133的一端转轴动地连接于所述转轴孔11a中,外壳连杆133的另一端与折叠架132的中部铰接,外壳连杆133的另一端的铰接轴线平行于转轴1a。外壳11上还设置有与脚踏面121平行的长条孔11b,折叠架132的一端通过连杆转轴132a可滑动地安装在所述长条孔11b中。结合a、b两个方位的视图可知外壳两侧上如图示位置对称布置有两个长条孔11b,折叠架的轴管中穿出轴并通向外壳的上两侧的长条孔11b中,通过调整折叠架132的连杆转轴132a在长条孔11b中滑动,可以将折叠伸缩架13整体折叠平方到外壳1中,如图12b方位所示,并通过连杆转轴132a上的压柄19进行锁定,完成折叠摆腿器折叠摆腿器1的折叠收纳,方便携带和储存。
[0144]
示例性地,在本发明实施例中,如图13所示,图13是折叠摆腿器1折叠后的状态,脚踏板12的脚踏面121上均匀间隔设置有多个按摩凸点12a,同时在脚踏面121的两侧凸出设置有防滑凸起12b,能够在用户踩踏在脚踏板12上时起到按摩和防滑作用,保证用户站立稳定,进一步提高了治疗与康复器材的安全性和使用舒适度。
[0145]
可选地,如图14所示,治疗与康复器材还包括翻转折叠座10,翻转折叠座10与折叠伸缩架13的另一端转动铰接,翻转折叠座10的铰接轴线与转轴1a同轴,翻转折叠座10用于支撑用户臀部。示例性地,在另一种可能实现的方式中,如图15所示,通过在折叠伸缩架13的另一端设置铰接连接的翻转折叠座10。对于一些站立困难的用户,在进行训练时可以将翻转折叠座10绕转轴1a旋转到水平状态对用户的臀部进行辅助支撑,使用户能够以坐姿进行腿部的摆动训练,进一步提高了治疗与康复器材的实用性。
[0146]
示例性地,在本发明实施例中,正舒关系数据采集组件包括第一传感器组61、第二传感器组62、第三传感器组63,用于采集用户使用状态下的正舒关系数据,运动量数据采集组件包括第四传感器组64用于采集用户使用状态下的运动量数据。正舒关系数据采集组件、运动量数据采集组件均与控制组件电连接,第一传感器组61包括分别设置于运动支撑组件上脚踏12的前方和后方的光电传感器,如图16所示,光电传感器的接收端分别垂直设置于两个发射端的上方;用户进行甩腿运动时,当接收端接收到光电信号时,信号未被用户遮挡,输出躯干直立状态值为0,k1=0,当接收端未接收到光电信号时,信号被用户遮挡,输出躯干直立状态值为1,k1=1。两组光电传感器分别对应检测左脚和右脚,两者之间的距离可以根据实际需求进行调整,传感器向上(竖直方向)发射光电信号,当人处于直立状态时,所发射的信号不会被人体遮挡。当处于弯曲状态时,该传感器发射的信号会被人体遮挡,传感器会检测出反射回来的信号,从而判断有障碍物,进而判断人体不是直立输出k1=1。若没有检测到反射回来的信号,则说明人体处理于直立状态输出k1=0。用于检测直立甩腿的传感器有4个,安装示意图如图17的俯视图所示。当人左脚站立,右脚甩腿时,若左侧一端的传感器检测不到反射回来的信号,则说明左腿直立。若右侧一端的传感器检测到有反射回来的信号,并且信号呈周期性的变化时,则说明右腿在进行甩腿运动。若右侧一端检测不到反射回来的信号时,则说明右腿处于直立状态。注意,传感器发射的信号的波束角很小。若
人处于弯腰驼背状态,因身体倾斜而导致发射的信号可以被反射回来,而被传感器检测到,从而判断人不是处于直立状态。
[0147]
第一传感器组61还可以通过在折叠摆腿器1上折叠伸缩架13的顶端转轴1a处设置tof传感器实现,如图18所示,tof传感器向人体上方发射探测信号。tof传感器向人体上身部分发射探测信号(发射方向如图所示),采集该部分空间的景深信号(与tof传感器距离最近所构成图像的连线)。当tof传感器采集到的景深信号与地面垂直时,人体处于直立状态,输出躯干直立状态值为0,k1=0;若采集的景深信号不与地面垂直,说明上半身处于弯曲状态,没有直立,输出躯干直立状态值为1,k1=1。tof传感器主要负责检测上半身是否直立。大腿与小腿是否直立仍可以通过安装在脚踏位置的4个光电传感器传感器来检测。光电传感器检测大腿以下是否有遮挡物。若光电传感器检测到有遮挡物,则说明大腿与小腿处于弯曲状态,没有直立。
[0148]
第二传感器组62包括设置于小腿长度调整架16上与用户膝盖后部对应处的位移传感器,如图16所示,位移传感器实时采集用户腿部与小腿长度调整架16的贴合状态,贴合时输出腿部直立状态值为0,k2=0,未贴合时输出腿部直立状态值为1,k2=1。
[0149]
第二传感器组62通过摄像头的实现的方式为:如图19所示,将摄像头安装在运动支撑组件的前部,通过摄像头对人的姿势动作进行识别。控制系统通过openpose系统可以识别出人的姿势动作。当人在进行甩腿运动时,该摄像头可以识别出锻炼者是否在做直立甩腿运动,输出躯干直立状态值、腿直状态值。
[0150]
第三传感器组63包括设置于运动支撑组件的脚踏下方的重量传感器,如图18所示,以实时采集用户的体重数据,采集负重支撑腿负重减轻标志位的方法为:两侧支撑时支撑腿承重减重/体重比s或者胸前支撑时的支撑腿承重减重/体重比n是否在分级治疗模型中负重支撑腿负重减轻δa的范围内,是则输出k3=0,否则输出k3=1。
[0151]
第四传感器组64包括设置于多功能支撑架2前部的距离传感器和外壳11侧面的光电传感器(可与第一传感器组61复用)。测量用户甩腿时运动幅度θ时,如图20所示,运动幅度θ=arctan(d/(h-l)),式中,h为用户腿部支点到底部支撑上表面的距离,l为距离传感器与被遮挡物之间的距离,d为距离传感器到用户腿部支点的投影距离。若想测量甩腿幅度功能还可以在器械的转轴处安装角度传感器,可以测得出器械的摆幅,即得到运动幅度θ。测量用户甩腿次数时,光电传感器通过检测到信号呈周期性的变化记录运动次数、运动频率。
[0152]
控制组件被配置为能够基于阶梯分级治疗模型中腿部助力f的类型对电机14进行控制,带动摆动角架15转动。当阶梯分级治疗模型中腿部助力f为补力时,电机14驱动摆动角架15转动,当腿部助力f为主动运动时,电机14不向摆动角架15提供动力,用户腿部驱动摆动角架15转动,当腿部助力f为阻力时,电机14向摆动角架15提供反向动力,用户通过腿部运动做功克服阻力,从而带动摆动角架15转动。
[0153]
可选地,如图21所示,治疗与康复器材还包括多功能支撑调整器3,多功能支撑调整器3与外壳11连接,多功能支撑调整器3上具有第一导轨31,第一导轨31与转轴1a平行,支撑底座21可滑动地连接于第一导轨31上,折叠摆腿器折叠摆腿器1包括两个脚踏板12,两个脚踏板12相对于小腿长度调整架16对称布置。示例性地,在本发明实施例中,通过在折叠摆腿器折叠摆腿器1的两侧分别设置一个脚踏板12,用户可以根据实际需求通过左腿站立支撑在脚踏板12上,利用小腿长度调整架16支撑右腿进行摆动训练,或者通过右腿站立支撑
在脚踏板12上,利用小腿长度调整架16支撑左腿进行摆动训练。在进行右腿摆动训练时,可以在第一导轨31的长度方向上调整支撑底座21的位置,使多功能支撑架2相对于多功能支撑调整器3移动到偏左的位置并进行固定连接;而在进行右腿摆动训练时,可以在第一导轨31的长度方向上调整支撑底座21的位置,使多功能支撑架2相对于多功能支撑调整器3移动到偏右的位置并进行固定连接。保证多功能支撑架2上的两个手肘腋下两用支撑托26能够移动到方便用户手肘或者腋下进行支撑的位置,进一步提高了治疗与康复器材的实用性以及用户的使用舒适度。
[0154]
示例性地,在本发明实施例中,多功能支撑调整器3上还可以设置第二导轨32,第二导轨32垂直于第一导轨31,外壳11可滑动地安装在第二导轨32上。用户可以根据实际需求在第二导轨32的长度方向上调节外壳11的相对位置,以调整整个折叠摆腿器折叠摆腿器1与多功能支撑架2之间的间距,实现对站位空间大小的调整,以适应不同胖瘦体型的用户进行使用,进一步提高了治疗与康复器材的实用性以及用户的使用舒适度。
[0155]
如图21所示,用户左腿在摆腿器上进行康复训练时,用户右脚踩在右边脚踏上,当用户切换到右腿训练时,左脚站在左边的脚踏上,此时人体会向左边移动半个身位,此时多功能支撑架2的位置需要同时进行调整,人才可以得到正位力线的支撑,因此x方向的平移功能可以解决此问题。x和y方向的联合调整,不仅可以改变相对支撑位,当y向移动时,还会增大减小用户站位空间,因此多功能支撑调整器3可以适应不同高矮胖瘦用户的需求,大大提升了设备的可用性。
[0156]
如图22所示,终端支撑架4包括直管架41、旋转u型管架42和万向调整支架44,直管架41垂直于脚踏面121且一端与折叠摆腿器多功能支撑调整器3固定连接,直管架41的另一端与旋转u型管架42转动连接,旋转u型管架42的另一端与万向调整支架44转动连接,旋转u型管架42上设置有遥控器安装座43,用于放置设备遥控器,万向调整支架44的另一端用于支撑显示器5。
[0157]
用户在需要使用该治疗与康复器材进行康复训练时,可以通过单腿直立站立在折叠摆腿器折叠摆腿器1的脚踏板12的脚踏面121上,将需要进行康复训练的另一条腿固定在由摆动角架15和小腿长度调整架16组成的摆动结构上,其中另一条腿的脚部可以踏在脚托板165a上进行支撑定位。用户在站立的同时,可以将肘部或者腋下支撑在多功能支撑架2上以保证身体的平衡,减轻站立腿的支撑负担。之后,用户可以依靠自身用力,使与腿部固定的小腿长度调整架16和摆动角架15一同绕转轴1a相对于折叠伸缩架13做钟摆运动,或者通过控制组件按照预设的程序对电机14进行控制,利用电机15驱动小腿长度调整架16和摆动角架15进行摆动,以进行康复训练。而在训练的同时,设置在脚踏板12上的第一传感器组61、第二传感器组62、第三传感器组63可以采集用户的正舒关系数据,包括舒适支撑高度和支撑腿承重减重、躯干直立状态值、腿部直立状态值;而设置在外壳11上的第四传感器组件64则可以采集用户的运动量数据,包括甩腿运动的运动次数、运动频率和运动幅度,并将正舒关系数据和运动量数据发送到控制组件中进行收集与分析,控制组件中的治疗过程控制模块会根据正舒关系判断指令调用反馈信息存储模块中对应的反馈指令,将所述运动量采集组件采集的运动次数、运动频率和运动幅度与分级治疗模型的对应值进行匹配,根据匹配结果调用反馈信息存储模块中对应的反馈指令,以控制电机14驱动摆动角架15的转速和频率,保证用于腿部的摆动速度和幅度处于合适的范围内,提高治疗与康复效果。
[0158]
当控制组件接收到第一传感器组61采集的正舒关系数据后,还可以通过正舒关系分析模块将实时采集的正舒关系数据输入正舒关系分析模型,实时判断用户姿态信息,输出正舒关系判断指令,当用户正舒关系不合格时同时输出不合格标志位。最终通过语音或视频或触感信息对用户进行提示,使用户调整到标准的身体姿态,保证治疗与康复效果。
[0159]
上述作用于康复器械的实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。