1.本实用新型涉及移动升降定位装置技术领域,尤其涉及一种用于屋顶悬挂汽车碰撞用高功率灯光的移动升降定位装置。
背景技术:
2.在新能源汽车的碰撞试验中,需要一套用于顶部照明的悬挂灯光系统,对碰撞试验过程中,对汽车顶部进行高精度照明,同时配合高速录像系统将碰撞过程进行全程记录,完成碰撞试验报告所必须的资料。
3.传统的悬挂灯光系统整体结构简单,功能单一,控制系统自动化程度不高,后续改造升级困难,且较为单一的悬挂灯架,如移动灯架在定位操作时,需要多人协调,费时费力,也存在一些安全隐患。
4.由上所述,为此我们设计出了一种用于屋顶悬挂汽车碰撞用高功率灯光的移动升降定位装置来解决以上问题。
技术实现要素:
5.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种用于屋顶悬挂汽车碰撞用高功率灯光的移动升降定位装置。
6.为了实现上述目的,本实用新型采用了如下技术方案:
7.一种用于屋顶悬挂汽车碰撞用高功率灯光的移动升降定位装置,包括装置本体,所述装置本体包括机械结构和定位系统,所述机械结构包括双导轨、悬挂跑车和灯架模块;
8.所述双导轨的两端均连接有连接架构成闭环结构,所述灯架模块设置有若干个,所述灯架模块包括悬挂灯架、灯架x层、灯架y层和灯架z层,所述悬挂灯架的顶部通过悬挂跑车滑动安装在双导轨上,所述灯架x层安装在悬挂灯架上,所述悬挂灯架的底部连接有竖直的第一固定架,所述第一固定架的底部连接有与悬挂灯架相对垂直的第二固定架,所述灯架y层安装在第一固定架上,所述灯架y层安装在第二固定架上;
9.所述定位系统包括plc控制模块、上位机模块、驱动模块、传感器和无线路由器,所述传感器安装在悬挂灯架的悬挂跑车上,所述悬挂跑车、传感器、上位机模块和驱动模块均与plc控制模块之间连接有导线,所述plc控制模块通过无线路由器无线连接有电子设备。
10.优选的,所述灯架模块设置有2-4个。
11.优选的,所述电子设备包括电子计算机、平板和手机中的任意一种或多种。
12.优选的,所述悬挂跑车包括驱动电机、驱动电机减速机、驱动转轴和两个驱动轮,所述驱动电机通过驱动电机减速机和驱动转轴与两个驱动轮驱动连接。
13.优选的,所述悬挂跑车还包括编码器,所述编码器与驱动转轴通过链条连接。
14.优选的,所述第一固定架和第二固定架均为可伸缩结构,所述可伸缩结构包括气缸和伸缩杆,所述伸缩杆的顶端与气缸的输出端连接。
15.与现有技术相比,本实用新型的有益效果是:本实用新型中,装置本体包括机械结构和定位系统,机械结构包括双导轨、悬挂跑车和灯架模块;双导轨的两端均连接有连接架构成闭环结构,灯架模块设置有若干个,灯架模块包括悬挂灯架、灯架x层、灯架y层和灯架z层,悬挂灯架的顶部通过悬挂跑车滑动安装在双导轨上,在使用时,可以通过车型型号和场景需要在双导轨1上安装可搭建出不同功能的灯架模块,通过装置本体的灯架采用模块化设计,各种模块的组合配置,可搭建出不同功能的灯架模块组;定位系统完全采用自动化控制,操作灵活方便,节约人力,控制精度高,可实时显示灯架的整体运行状态;同时,本悬挂灯光系统可满足不同客户的定制需求,并且能很好地为后续灯光系统改造或升级。
附图说明
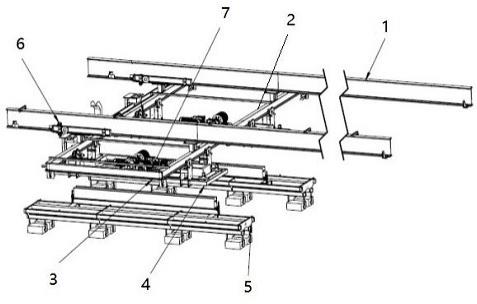
16.图1为本实用新型提出的一种用于屋顶悬挂汽车碰撞用高功率灯光的移动升降定位装置的结构示意图;
17.图2为本实用新型提出的一种用于屋顶悬挂汽车碰撞用高功率灯光的移动升降定位装置的工作流程图。
18.图中:1双导轨、2悬挂灯架、3灯架x层、4灯架y层、5灯架z层、6悬挂跑车、7灯架模块、8plc控制模块、9无线路由器。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
20.参照图1-2,一种用于屋顶悬挂汽车碰撞用高功率灯光的移动升降定位装置,包括装置本体,装置本体包括机械结构和定位系统,机械结构包括双导轨1、悬挂跑车6和灯架模块7;
21.双导轨1的两端均连接有连接架构成闭环结构,灯架模块7设置有若干个,灯架模块7包括悬挂灯架2、灯架x层3、灯架y层4和灯架z层5,悬挂灯架2的顶部通过悬挂跑车6滑动安装在双导轨1上,灯架x层3安装在悬挂灯架2上,悬挂灯架2的底部连接有竖直的第一固定架,第一固定架的底部连接有与悬挂灯架2相对垂直的第二固定架,灯架y层4安装在第一固定架上,灯架y层4安装在第二固定架上;
22.定位系统包括plc控制模块8、上位机模块、驱动模块、传感器和无线路由器9,传感器安装在悬挂灯架2的悬挂跑车5上,悬挂跑车5、传感器、上位机模块和驱动模块均与plc控制模块8之间连接有导线,plc控制模块8通过无线路由器9无线连接有电子设备;
23.更加具体的是,灯架模块7设置有2个,电子设备为平板;
24.其中,悬挂跑车6包括驱动电机、驱动电机减速机、驱动转轴和两个驱动轮,驱动电机通过驱动电机减速机和驱动转轴与两个驱动轮驱动连接,悬挂跑车6还包括编码器,编码器与驱动转轴通过链条连接,第一固定架和第二固定架均为可伸缩结构,可伸缩结构包括气缸和伸缩杆,伸缩杆的顶端与气缸的输出端连接,能够在使用时,根据需求对灯架进行高度调节。
25.本装置本体的灯架采用模块化设计,各种模块的组合配置,可搭建出不同功能的
灯架模块组;定位系统完全采用自动化控制,操作灵活,控制精度高,可实时显示灯架的整体运行状态;同时,本悬挂灯光系统可满足不同客户的定制需求,并且能很好地为后续灯光系统改造或升级。
26.工作原理:在使用时,可以通过车型型号和场景需要在双导轨1上安装可搭建出不同功能的灯架模块,然后通过电子设备对其进行自动控制,操作过程中,悬挂灯架的悬挂跑车加装传感器,用来读取悬挂跑车的当前位置值,plc给悬挂跑车输出运行指令,并实时采集悬挂跑车的当前位置,根据反馈数据,不断的修正跑车的当前位置来达到精确定位;上位机与plc通讯,上位机画面显示当前系统的各种数据及运行状态,使操作人员能很好地了解整个系统的当前状态;
27.同时,闭环结构是定位系统输出量的一部分或全部,可以通过悬挂跑车6把灯架模块7反送回双导轨的输入端,然后通过编码器将反馈信息与原输入信息进行比较,再将比较的结果施加于系统进行控制,避免系统偏离预定目标。
28.在使用时,通过plc+上位机利用工业无线网络,可用平板在现场一人操作,而且操作画面友好。
29.需要说明的是,悬挂的灯架模块7的控制方式可手/自动切换操作。手动模式下,根据灯架模块7的运动流程进行点动操作;在自动模式下,可以根据不同车型建立不同配方单,选定配方后按下启动,灯架模块7会自动运行到该配方单位置,试验完毕,按下回原命令,悬挂灯架会自动运行到初始位。本灯架结构为模块化设计,安装简单,维护方便。
30.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、
ꢀ“
右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、
“ꢀ
顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
31.此外,术语“第一”、
ꢀ“
第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
32.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。