1.本实用新型涉及消防技术领域,特别是一种平衡型消防水枪及飞行机器人消防系统。
背景技术:
2.近年来,随着我国各地高层建筑和超高层建筑不断增加,当几十米甚至上百米的高楼发生火灾时,会面临高空灭火的难题。
3.为解决上述问题,本领域技术人员想到,使用飞行机器人携带消防水枪进行高空灭火,但是在使用过程中,又发现其存在以下问题;消防水枪普遍横向设置(水平或者接近水平),消防水枪喷出的液体会对水枪产生后坐力,该后坐力从水枪前端出水口出水的一瞬间从零开始迅速增大,如无人飞控系统没有及时调整飞行机器人姿态,容易导致飞行机器人瞬间失稳,严重时会造成飞行机器人的安全事故。
技术实现要素:
4.本实用新型的目的在于:针对现有技术存在的在消防水枪前端出水口出水的一瞬间,从消防水枪前端喷出的液体对消防水枪产生迅速增大的后坐力的问题,提供一种平衡型消防水枪及飞行机器人消防系统。
5.为了实现上述目的,本实用新型采用的技术方案为:
6.一种平衡型消防水枪,包括消防水枪腔体和入水口,所述入水口与所述消防水枪腔体相连通,所述消防水枪腔体前端设置有前向出水口,所述消防水枪腔体后端设置有后向出水口,所述后向出水口与所述前向出水口之间具有角度a,a为(90
°
,180
°
],所述入水口位于所述前向出水口和后向出水口之间,所述后向出水口处设置有用于通断所述后向出水口的阀门组件,且所述阀门组件被配置为:所述后向出水口出水时,所述阀门组件由打开状态至闭合状态,且所述阀门组件由打开状态至闭合状态的时间长度为[0.1,50s]。
[0007]
本技术所述的一种平衡型消防水枪,消防水枪腔体的前端设置有前向出水口,所述消防水枪腔体后端设置有后向出水口,且将所述入水口设置于所述前向出水口和后向出水口之间,在工作时,液体由入水口进入消防水枪腔体,同时流向前向出水口和后向出水口,所述后向出水口与所述前向出水口之间具有角度a,a为(90
°
,180
°
],在前向出水口出水的一瞬间,从前向出水口喷出的液体会对消防水枪腔体有一个朝向后向出水口方向的后坐力一,同理,在后向出水口出水的一瞬间,从后向出水口喷出的液体会对消防水枪腔体有一个朝向前向出水口方向的后坐力二,使得后坐力二能够抵消后坐力一的一部分或者全部,从而在前向出水口出水的一瞬间,消防水枪腔体受到了后坐力合力大大变小,显著地减弱从消防水枪前端喷出的液体对消防水枪产生迅速增大后坐力的最大值,或者从消防水枪前端喷出的液体对消防水枪产生的后坐力基本为零,之后,所述阀门组件由打开状态至闭合状态,且所述阀门组件由打开状态至闭合状态的时间长度为[0.1,50s],使得阀门组件由打开状态至闭合状态的过程具有一定时间,能够使后向出水口逐渐关闭,前向出水口产生的
后坐力逐渐增大,便于飞控系统通过调节动力来平衡该后坐力,进而大大减小飞行机器人因消防水枪腔体受到迅速增大的后坐力造成瞬间失稳,严重时造成飞行机器人的安全事故的概率。
[0008]
之后,由于阀门组件关闭,后向出水口不再出水,由入水口进入消防水枪腔体的液体全部从前向出水口喷出,进行灭火。
[0009]
优选地,所述后向出水口与所述前向出水口反向设置。
[0010]
优选地,所述消防水枪腔体为y型或t型。
[0011]
优选地,所述阀门组件被配置为:从后向出水口出水至所述阀门组件完成闭合的时间长度为[0.5s,50s]。
[0012]
通过实验得到,普遍来说,从后向出水口出水的一瞬间向后0.5s,前向出水口和后向出水口能达到出水稳定,故在此之后,阀门组件关闭,即能够使本技术的平衡型消防水枪能够达到减缓消防水枪受到迅速增大的后坐力的效果。
[0013]
优选地,所述入水口(2)竖向设置。
[0014]
优选地,所述阀门组件包括阻塞部件和弹性件,所述阻塞部件设置于所述消防水枪腔体内,所述阻塞部件位于所述入水口和所述后向出水口之间,所述弹性件设置于所述阻塞部件靠近所述后向出水口的一侧,所述入水口与所述后向出水口之间通过阻塞口相连通,所述阻塞口位于所述阻塞部件靠近所述后向出水口的一侧,所述阻塞部件能够阻塞所述阻塞口,所述阻塞部件的顶端高于所述弹性件顶部。
[0015]
所述阻塞部件设置于所述消防水枪腔体内,所述阻塞部件位于所述入水口和所述后向出水口之间,所述弹性件设置于所述阻塞部件靠近所述后向出水口的一侧,水进入消防水枪腔体后挤压阻塞部件,使阻塞部件向弹性件一侧移动,挤压弹性件,使得弹性件压缩,弹性件压力反向逐渐增大,一定时间以后,阻塞部件能够阻塞所述阻塞口,使得阀门组件完成逐渐由打开状态至闭合状态的过程,进而实现阀门组件延迟关闭的功能,减小了后坐力增加的速度。
[0016]
优选地,所述阻塞部件为球形构件。
[0017]
优选地,所述阀门组件包括阀门和控制器,所述控制器能够控制所述阀门通断。
[0018]
本实用新型还公开了一种飞行机器人消防系统,包括飞行机器人和如本技术所述的一种平衡型消防水枪,所述飞行机器人与所述消防水枪腔体相连接,所述消防水枪腔体下方设置有底座,所述飞行机器人与所述底座相连接,所述底座上设置有用于连接消防水带的接头,所述接头与所述入水口相连通。
[0019]
优选地,所述飞行机器人与所述消防水枪腔体转动连接,来实现消防水枪腔体的微调,进而实现救火时,前向出水口喷出的水更精确地到达目标位置。
[0020]
优选地,所述接头与所述入水口通过柔性水带相连通。使得飞行机器人下方的消防水带的重量主要由飞行机器人来承受,进而提高消防水枪腔体与飞行机器人的相对转动的灵活程度。
[0021]
优选地,所述底座上还设置有电源接头,所述电源接头与所述飞行机器人电连接。
[0022]
综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
[0023]
1、本技术所述的一种平衡型消防水枪,能够显著地减弱从消防水枪前端喷出的液体对消防水枪产生迅速增大后坐力的最大值,或者从消防水枪前端喷出的液体对消防水枪
产生的后坐力基本为零,之后,所述阀门组件由打开状态至闭合状态,且所述阀门组件由打开状态至闭合状态的时间长度为[0.1,50s],使得阀门组件由打开状态至闭合状态的过程具有一定时间,能够使后向出水口逐渐关闭,前向出水口产生的后坐力逐渐增大,便于飞控系统通过调节动力来平衡该后坐力,进而大大减小飞行机器人因消防水枪腔体受到迅速增大的后坐力造成瞬间失稳,严重时造成飞行机器人的安全事故的概率。
[0024]
2、本技术所述的一种飞行机器人消防系统,所述飞行机器人与所述消防水枪腔体转动连接,来实现消防水枪腔体的微调,进而实现救火时,前向出水口喷出的水更精确地到达目标位置。
[0025]
3、本技术所述的一种飞行机器人消防系统,所述接头与所述入水口通过柔性水带相连通。使得飞行机器人下方的消防水带的重量主要由飞行机器人来承受,进而提高消防水枪腔体与飞行机器人的相对转动的灵活程度。
附图说明
[0026]
图1是本实用新型的一种平衡型消防水枪的结构示意图(t型,机械式,阀门组件为打开状态)。
[0027]
图2是本实用新型的一种平衡型消防水枪的结构示意图(t型,机械式,阀门组件为关闭状态)。
[0028]
图3是本实用新型的一种平衡型消防水枪的结构示意图(t型,电控式)。
[0029]
图4是本实用新型的一种平衡型消防水枪的结构示意图(y型,电控式)。
[0030]
图5是本实用新型的一种平衡型消防水枪的结构示意图(y型,机械式,阀门组件为打开状态)。
[0031]
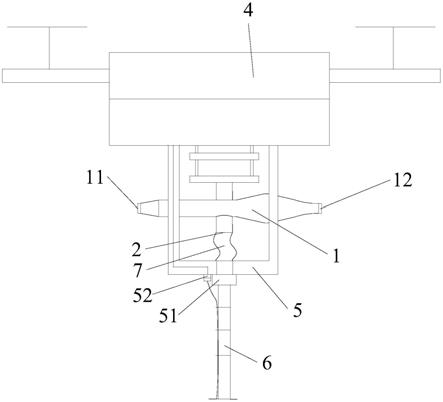
图6是本实用新型的一种飞行机器人消防系统的结构示意图(主视)。
[0032]
图7是本实用新型的一种飞行机器人消防系统的结构示意图(右视)。
[0033]
图8是本实用新型的一种平衡型消防水枪的结构示意图(t型,机械式,阀门组件为打开状态,后向出水口为2个)。
[0034]
图标:1
‑
消防水枪腔体;11
‑
前向出水口;12
‑
后向出水口;13
‑
放置区段;14
‑
阻塞口;2
‑
入水口;3
‑
阀门组件;31
‑
阻塞部件;32
‑
弹性件;33
‑
阀门;34
‑
控制器;35
‑
感应装置;4
‑
飞行机器人;5
‑
底座;51
‑
接头;52
‑
电源接头;6
‑
消防水带。
具体实施方式
[0035]
下面结合附图,对本实用新型作详细的说明。
[0036]
为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
[0037]
实施例1
[0038]
如图1、2和5所示,本实施例所述的一种平衡型消防水枪,包括消防水枪腔体1和竖向设置的入水口2,所述入水口2与所述消防水枪腔体1相连通,所述消防水枪腔体1前端设置有前向出水口11,所述消防水枪腔体1后端设置有后向出水口12,所述后向出水口12与所述前向出水口11之间具有角度a,a为(90
°
,180
°
],所述入水口2位于所述前向出水口11和后
向出水口12之间,所述后向出水口12处设置有用于通断所述后向出水口12的阀门组件3,且所述阀门组件3被配置为:所述后向出水口12出水时,所述阀门组件3由打开状态至闭合状态,且所述阀门组件3由打开状态至闭合状态的时间长度为[0.1,50s]。
[0039]
最优也最简单的情况是:所述后向出水口12与所述前向出水口11反向设置。
[0040]
在工作时,液体由入水口2进入消防水枪腔体1,同时流向前向出水口11和后向出水口12,所述后向出水口12与所述前向出水口11之间具有角度a,a为(90
°
,180
°
],在前向出水口11出水的一瞬间,从前向出水口11喷出的液体会对消防水枪腔体1产生一个朝向后向出水口12方向的后坐力一,同理,在后向出水口12出水的一瞬间,从后向出水口12喷出的液体会对消防水枪腔体1产生一个朝向前向出水口11方向的后坐力二,使得后坐力二能够抵消后坐力一的一部分或者全部,从而在前向出水口11出水的一瞬间,消防水枪腔体1受到的后坐力合力大大变小,显著地减弱从消防水枪前端喷出的液体对消防水枪产生迅速增大后坐力的最大值,或者从消防水枪前端喷出的液体对消防水枪产生的后坐力基本为零,之后,所述阀门组件3由打开状态至闭合状态,且所述阀门组件3由打开状态至闭合状态的时间长度为[0.1,50s],使得阀门组件3由打开状态至闭合状态的过程具有一定时间,能够使后向出水口12逐渐关闭,前向出水口11产生的后坐力逐渐增大,便于飞控系统通过调节动力来平衡该后坐力,进而大大减小飞行机器人因消防水枪腔体1后坐力造成瞬间失稳,严重时会造成飞行机器人的安全事故的概率。
[0041]
之后,在前向出水口11出水达到稳定后,用于通断所述后向出水口12的阀门组件3由打开状态至闭合状态,阀门组件3关闭,后向出水口12不再出水,由入水口2进入消防水枪腔体1的液体从前向出水口11喷出,进行灭火。
[0042]
如图8所示,后向出水口12可以为一个,也可以为至少两个,后向出水口12出水的一瞬间,只要从后向出水口12喷出的液体会对消防水枪腔体1一个朝向前向出水口11方向的后坐力二即可满足使用要求,后坐力二可以是分力,也可以是合力。
[0043]
如图5所示,所述消防水枪腔体1可以选择y型,y型的结构使得进入消防水枪腔体1的水的阻力更小;
[0044]
如图1和2所示,所述消防水枪腔体1也可以选择t型,制作成本更低。
[0045]
为保证所述后向出水口12出水时,所述阀门组件3由打开状态至闭合状态,而不是在后向出水口12出水的一瞬间,阀门组件3马上关闭。
[0046]
通过实验得到,所述阀门组件3被配置为:从后向出水口12出水至所述阀门组件3至闭合状态的时间为[0.5s,50s],普遍来说,从后向出水口12出水的一瞬间开始0.5s,前向出水口11和后向出水口12能达到出水稳定,故在此之后,阀门组件3完成关闭,即能够使本技术的平衡型消防水枪达到减缓消防水枪受到瞬时后坐力过大的效果,当然,越靠近0.5s完成关闭,还能够起到节水的效果,避免过多的水用于输出用于抵消后坐力。
[0047]
具体地介绍一种机械方式的平衡型消防水枪来说明上述方案的实际应用,所述阀门组件3包括阻塞部件31和弹性件32,所述阻塞部件31设置于所述消防水枪腔体1内,所述阻塞部件31位于所述入水口2和所述后向出水口12之间,所述弹性件32设置于所述阻塞部件31靠近所述后向出水口12的一侧,所述入水口2与所述后向出水口12之间通过阻塞口14相连通,所述阻塞口14位于所述阻塞部件31靠近所述后向出水口12的一侧,所述阻塞部件31能够阻塞所述阻塞口14,所述阻塞部件31的顶端高于所述弹性件32顶部。
[0048]
所述阻塞部件31设置于所述消防水枪腔体1内,所述阻塞部件31位于所述入水口2和所述后向出水口12之间,所述弹性件32设置于所述阻塞部件31靠近所述后向出水口12的一侧,水进入消防水枪腔体1后挤压阻塞部件31,使阻塞部件31向弹性件32一侧移动,挤压弹性件32,使得弹性件32压缩,弹性件32压力反向逐渐增大,一定时间以后,阻塞部件31能够阻塞所述阻塞口14,使得阀门组件3完成由打开状态至闭合状态的逐渐关闭过程,整个过程中,弹性件32的压缩会有一定的时间,使得阻塞部件31从放置位置至阻塞所述阻塞口14的过程需要一定时间,在此时间内,前向出水口11和后向出水口12出水相互平衡,进而实现阀门组件3延迟关闭的功能,减小了后坐力增加的速度,从而使得在前向出水口11出水的一瞬间,消防水枪腔体1受到了后坐力合力大大变小,进而大大减小飞行机器人因消防水枪腔体1后坐力迅速增大造成瞬间失稳,严重时会造成飞行机器人的安全事故的概率。
[0049]
优选地,所述阻塞部件31为球形构件。
[0050]
具体地,所述阀门组件3包括阻塞部件31和弹性件32,所述消防水枪腔体1内设置有放置区段13,所述放置区段13位于所述入水口2和所述后向出水口12之间,所述阻塞部件31设置于放置区段13内,所述弹性件32设置于所述阻塞部件31靠近所述前向出水口11的一侧,所述放置区段13与所述后向出水口12之间通过阻塞口14相连通,所述阻塞部件31能够阻塞所述阻塞口14,所述阻塞部件31的顶端高于所述弹性件32顶部。
[0051]
放置区段13优选做成中间大,两侧小的腔体,如此设置是保证阻塞部件31不会进入入水口2,或者入水口2与前向出水口11之间。
[0052]
具体地,所述弹性件32为弹簧。
[0053]
具体地,所述放置区段13为朝向后端的喇叭口段,阻塞部件31为球体,球体重量轻,其可采用树脂等轻形材料制作,球体和弹簧不连接,但球顶部高于弹簧顶部,使得当水挤压球体后,球体能够挤压弹簧,完成阀门组件3延迟关闭的功能。
[0054]
消防水枪腔体1内设置球体,球体靠近消防水枪腔体1的后端的一侧设置弹簧,水进入消防水枪腔体1后挤压球体,使球体向弹簧一侧移动,挤压弹簧,使得弹簧压缩,弹簧压力反向逐渐增大,进而实现慢速关闭的功能。
[0055]
实施例2
[0056]
如图3和4所示,本实施例所述的一种平衡型消防水枪,与实施例1的不同之处在于:所述阀门组件3包括阀门33和控制器34,所述控制器34能够控制所述阀门33通断,以实现延迟关闭阀门33的目的。
[0057]
所述消防水枪腔体1后端设置有感应装置35,所述感应装置35与所述控制器34通讯连接,且所述感应装置35用于控制所述控制器34计时,控制器34控制所述阀门33的关闭或开启。所述控制器还可以接收外部控制信号,控制所述阀门33的关闭和和开启。
[0058]
方式一:控制器34可以由感应装置35控制,且其有计时功能,所述消防水枪腔体1后端设置有感应装置35,所述感应装置35与所述控制器34通讯连接,且所述感应装置35用于控制所述控制器34计时并使阀门33通断,在使用过程中,液体由入水口2进入消防水枪腔体1,在流向后向出水口12过程中,感应装置35检测到液体,之后向控制器34发出信号,控制器34开始计时,计时至目标时间后,控制器34控制阀门33关闭,使得后向出水口12不再出水,进而实现阀门组件3延迟关闭的功能。
[0059]
方式二:可以通过遥控器手动控制控制器34,当后向出水口12出水后,操作任意通
过遥控器遥控控制器34,使得控制器34控制阀门33关闭使得后向出水口12不再出水,进而实现阀门组件3延迟关闭的功能。
[0060]
在上述方式一或方式二中,控制器34和阀门33可以集成至一起,也可以用具有延时功能的阀门来代替。
[0061]
如图3所示,所述消防水枪腔体1可以选择y型,y型的结构使得进入消防水枪腔体1的水的阻力更小;
[0062]
如图4所示,所述消防水枪腔体1也可以选择t型,制作成本更低。
[0063]
实施例3
[0064]
如图6和7所示,本实施例所述的一种飞行机器人消防系统,包括飞行机器人4和如实施例1或2所述的平衡型消防水枪,所述飞行机器人4与所述消防水枪腔体1相连接,所述消防水枪腔体1下方设置有底座5,所述飞行机器人4与所述底座5相连接,所述底座5上设置有用于连接消防水带6的接头51,所述接头51与所述入水口2相连通。
[0065]
所述飞行机器人4与所述消防水枪腔体1转动连接,来实现消防水枪腔体1的微调,进而实现救火时,前向出水口11喷出的水更精确地到达目标位置。
[0066]
所述接头51与所述入水口2通过柔性水带7相连通。使得飞行机器人4下方的消防水带6的重量主要由飞行机器人4来承受,进而提高消防水枪腔体1与飞行机器人4的相对转动的灵活程度。
[0067]
所述底座5上还设置有电源接头52,所述电源接头52与所述飞行机器人4控制系统电连接,来使得通过电源接头52给飞行机器人4输送动力,由于飞行机器人4上有螺旋桨,会使得其下方的电线乱摆,故在底座5上还设置有电源接头52,来将靠近飞行机器人4的一部分电线固定在底座5上,降低其安全风险。
[0068]
飞行机器人应理解为可飞行的机器人,其具体包括无人机等。
[0069]
以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。