1.本发明涉及一种绝缘气柱升降装置,属于电力行业带电作业技术领域。
背景技术:
2.当前,国内电力行业中配网不停电作业已经非常普遍,其中带电作业需求日益增大。然而,目前对于带电高空作业,目前现有的绝缘高空作业平台大都是使用绝缘斗臂车,由大型的工程车加装绝缘斗臂改造而成,其存在体积大、吨位重、通过空间有限制的缺点,且结构较为繁杂,制造成本高、价格昂贵。
技术实现要素:
3.本发明的目的在于提供一种绝缘气柱升降装置,以解决上述背景技术中提出的问题。
4.为实现上述目的本发明采用以下技术方案:一种绝缘气柱升降装置,包括气柱本体、绝缘拉绳设备和自动充放气装置;自动充放气装置与绝缘拉绳设备通过电缆相连接,用于向其提供控制信号和能源供给,自动充放气装置通过气管与气柱本体相连接, 并与气柱本体的各个传感器通过无线通讯的方式来连接,用于数据交互满足带电绝缘作业的要求。
5.作为本发明的进一步方案,所述气柱本体包括由气囊、气囊拉环、顶部安装板、角度传感器、拉力传感器、气管快插接口、测距传感器、柔性连接件;多个气囊通过柔性连接件相互连接在一起,每个气囊上都安装有至少3个气囊拉环和气管快插接口,气囊拉环用于起到与拉力传感器、绝缘拉绳设备的绝缘绳固定的连接作用,每个气管快插接口都通过绝缘气管独立与自动充放气装置相连接,是每个气囊的充、放气通道,所述气柱本体的顶部安装有顶部安装板,其和顶部气囊通过紧固件连接在一起,作为整个升降装置的放置作业设备和人员的举升平台,所述顶部安装板的中间安装有角度传感器,起到测量顶部安装板倾角的作用,在顶部安装板的边缘均匀的布置了多个测距传感器,其安装在气囊轮廓之外,不受气囊本体遮挡,可以准确测量顶部安装板到底部的高度,同时顶部气囊的每个气囊拉环上安装有拉力传感器,其一端与气囊拉环连接,另一端与绝缘拉绳设备的绝缘绳相连,能实时测量顶部气囊所受的每个方向的拉力,所述拉力传感器的电缆汇聚在顶部安装板内,与角度传感器、测距传感器一起将传感器测量信号通过无线的方式与底部的控制系统相连。
6.作为本发明的进一步方案,绝缘拉绳设备包括绝缘绳、导向轮、导向轮安装支架、导向轮伸缩支架、调节螺母、排绳器、拉绳绞盘、同步带轮、同步带、伺服动力组件、安装底板、回转圆盘、圆盘支撑件、外罩、提手和设备安装支架;绝缘拉绳设备的外罩固定在安装底板上,用于起到装饰、防护的作用;同时外罩上还安装有至少1个提手,用于设备的搬运和携带,所述绝缘绳一端与气柱本体连接在一起,另一端穿过导向轮,进入到排绳器中,并通过排绳器排布缠绕方向,整齐缠绕在拉绳绞盘上,其中导向轮固定在导向轮安装支架上,
其能够在上绕轴进行旋转运动,导向轮安装支架固定在导向轮伸缩支架末端,其能沿绝缘绳轴线方向进行调整,从而确定导向轮和排绳器的合适的轴心距离,同时能够通过调节螺母来锁定导向轮伸缩支架;所述排绳器输入轴为排绳器的动力来源,其上安装有同步带轮,通过同步带与绞盘长轴上安装的同步带轮相连,同时拉绳绞盘与绞盘长轴相连,绞盘长轴两端分别通过支撑轴承固定在绞盘支架上,绞盘支架为u型支架;拉绳绞盘位于u型口中间,且能通过绞盘长轴进行旋转运动,当拉绳绞盘进行旋转时,排绳器也与其一同旋转;绞盘长轴的另一端也安装有同步带轮,同样通过同步带与伺服动力组件上安装的同步带轮相连接,当伺服动力组件开始输出动力时,拉绳绞盘、排绳器都会一起作旋转运动;导向轮伸缩支架安装在安装底板的背面,所述排绳器、伺服动力组件依次安装在安装底板的正面,回转圆盘通过圆盘支撑件也安装在安装底板的背面,导向轮伸缩支架位于安装底板和回转圆盘的中间,整个设备能在回转圆盘上进行回转运动。
7.作为本发明的进一步方案,设备安装支架为车辆平台安装件,当绝缘气柱升降装置安装在车辆上使用,绝缘拉绳设备安装在设备伸缩支架上,设备伸缩支架以铰接的方式与设备固定支架固定在一起,并能绕铰接轴进行摆臂运动,便于调整绝缘拉绳设备的位置。设备固定支架固定在车辆的车身四周,其伸缩方向垂直于车身。绝缘拉绳设备借助于设备安装支架可以安装在移动车辆上,气柱本体和自动充放气装置也安装在移动车辆车斗内,通过设备安装支架,可以调整其角度和距离,使其以气柱本体为圆心,均匀分布在四周,让绝缘绳可以均匀,平稳的牵引气柱本体。
8.作为本发明的进一步方案,所述伺服动力组件由电机安装支架,减速机和伺服电机组成,减速机一端安装在电机安装支架上,另一端与伺服电机相连接,同时同步带轮安装在减速机的输出轴上。
9.作为本发明的进一步方案,所述自动充放气装置包括控制盒、电磁阀、气管连接件、气罐、气泵、气压测量计、排气阀;所述控制盒其内部安装有控制系统和能源模块,为本绝缘气柱装置提供控制指令和能源供给,同时控制盒正面还集成有电磁阀块,其上安装有数量与气囊个数一样的电磁阀,每个电磁阀通过独立的绝缘气管与每个气囊相连,每个电磁阀都在阀块上共用一个内部气道,该气道与气管连接件一端相连接,气管连接件另一端与气罐相联通,气罐又通过气管通道依次与气压测量计、气泵、排气阀相联通,上述气罐、气泵安装在控制盒的侧面,气压测量计和排气阀安装在气泵上,彼此都通过气道相连。
10.作为本发明的进一步方案,所述气柱本体外观为环节状圆柱体,柔性连接件也为圆柱形结构,其直径略小余气囊,所述顶部安装板直径大于气囊的直径。
11.作为本发明的进一步方案,所述气柱本体不仅在顶部气囊处连接绝缘绳,其他每个气囊都能够连接绝缘拉绳设备的绝缘绳,其配套的绝缘拉绳设备也能够准备相应数量以匹配多个气囊的拉扯需要,能够根据作业环境和需求来灵活配置设备。
12.作为本发明的进一步方案,该绝缘气柱升降装置用在移动车辆或平台上或直接用携带用在地面上,所用设备均都可以直接按照在地面,通过锚定方式与地面固定,来进行升降操作,同时该绝缘气柱升降装置,用在带电作业中或在任何适宜场合进行高空作业,并能调整升降装置的空中姿态和顶部升降平台的工作位置。
13.1、与现有技术相比,本发明的有益效果是:本发明实施例中的绝缘升降装置,采用
充气式的升降方式,重量轻、升高比大,能够安全且经济的将人和设备举升到指定的作业高度;2、本发明采用多传感器融合和伺服拉绳控制,平台升降完全实现智能化控制,且末端是基于柔性的气囊,通过不同方位的拉绳的拉扯能精确的控制气柱本体末端的角度和高度,使其姿态可控,解决了传统气柱易受到外界环境风的干扰而不稳的难题,从而保证作业安全,易于操作,方便作业位置调整;3、本发明气柱本体采用可收纳式结构设计,体积小,使其能够便于携带,同时其他配套设备都设计轻巧、易于安装,便于携带;4、本发明考虑了多种运输载体下的应用情况,既可以安装在移动底盘例如皮卡、工程车等上,也能直接安装在地面,其运输、安装方式多样化;5、本发明实施例中,不仅可以运用在带电作业环境下的高空作业,也可以用在常规环境下的高空作业,在常规作业下,绝缘绳也可以替换为非绝缘高强度绳索,提高了升降装置的使用率,降低了成本;6、本发明安全性好、使用方便、操作简单、结构紧凑、便于携带,作业效率高、适用范围广。
附图说明
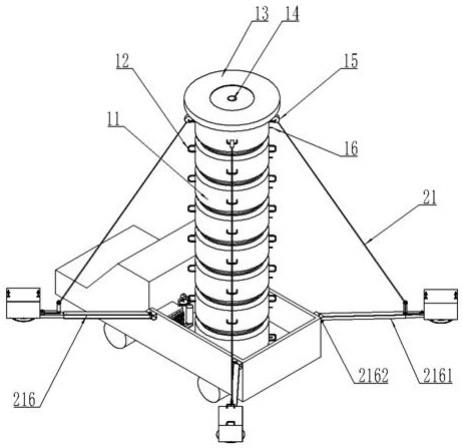
14.图1为本发明实施例提供的绝缘气柱升降装置的整体结构示意图;图2为本发明实施例提供的绝缘气柱升降装置的侧视结构示意图;图3为本发明实施例提供的绝缘气柱升降装置的俯视结构示意图;图4为本发明实施例提供的绝缘拉绳设备的结构示意图;图5为本发明实施例中绝缘拉绳设备的内部结构示意图;图6为本发明实施例中绝缘拉绳设备的去除外罩的侧视结构示意图;图7为本发明实施例中自动充放气装置的结构示意图;图中:1-气柱本体;11-气囊;12-气囊拉环;13-顶部安装板;14-角度传感器;15-拉力传感器;16-气管快插接口;17-测距传感器;18-柔性连接件;2-绝缘拉绳设备;21-绝缘绳;22-导向轮;23-导向轮安装支架;24-导向轮伸缩支架;25-调节螺母;26-排绳器;261-排绳器输入轴;27-拉绳绞盘;271-绞盘长轴;272-绞盘支架;273-支撑轴承;28-同步带轮;29-同步带;210-伺服动力组件;2101-电机安装支架;2102-减速机;2103-伺服电机;211-安装底板;212-回转圆盘;213-圆盘支撑件;214-外罩;215-提手;216-设备安装支架;2161-设备伸缩支架;2162-设备固定支架;3-自动充放气装置;31-控制盒;32-电磁阀;33-气管连接件;34-气罐;35-气泵;36-气压测量计;37-排气阀。
具体实施方式
15.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的阐述。
16.如图1-7所示,本发明的实施例提供一种绝缘气柱升降装置,是一种可以用于带电作业中,将人或作业设备精确举升到作业区域指定高度的可控柔性升降平台,包括气柱本体1,绝缘拉绳设备2和自动充放气装置3;自动充放气装置3与绝缘拉绳设备2通过电缆的方
式相连接,向其提供控制信号和能源供给,自动充放气装3置通过气管与气柱本体1相连接, 并与气柱本体1的各个传感器通过无线通讯的方式来连接,已达到数据交互的目的,满足带电绝缘作业的要求。
17.所述气柱本体1其典型外观为环节状圆柱体,包括气囊11、气囊拉环12、顶部安装板13、角度传感器14、拉力传感器15、气管快插接口16、测距传感器17、柔性连接件18;多个气囊11通过柔性连接件18相互连接在一起,柔性连接件18也为圆柱形结构,其直径略小余气囊,其既能保证气囊11能稳定、牢靠连接在一起堆叠形成圆柱体,又能保证气囊11能以柔性连接件18的轴线为基准改变自己的角度,类似于自然界的环节肢类昆虫构造。
18.每个气囊11上都安装有至少3个以上的气囊拉环12和气管快插接口16;气囊拉环12起到与拉力传感器15、绝缘绳21固定的连接作用;每个气管快插接口16都通过绝缘气管独立与自动充放气装置3相连接,是每个气囊的充、放气通道。所述气柱本体1的顶部安装有顶部安装板13,其和顶部气囊通过紧固件连接在一起,作为整个升降装置的放置作业设备和人员的举升平台,其直径大于气囊11的直径,所述顶部安装板13的中间安装有角度传感器14,起到测量顶部安装板倾角的作用。在顶部安装板13的边缘均匀的布置了多个测距传感器17,其安装在气囊轮廓之外,不受气囊本体遮挡,可以准确测量顶部安装板到底部的高度;同时顶部气囊11的每个气囊拉环12上安装有拉力传感器15,其一端与气囊拉环12连接,另一端与绝缘绳21相连,能实时测量顶部气囊11所受的每个方向的拉力,所述拉力传感器15的电缆汇聚在顶部安装板13内,与角度传感器14、测距传感器17一起将传感器测量信号通过无线的方式与底部的控制系统相连。
19.所述气柱本体1不限于只在顶部气囊11处连接绝缘绳21,其他每个气囊11都可以连接绝缘绳21,其配套的绝缘拉绳设备2也可以准备相应数量以匹配多个气囊11的拉扯需要,可根据作业环境和需求来灵活配置设备。
20.由此,所述气柱本体1为升降装置的柔性举升平台,其能够实现位于顶部安装板上的设备或人的抬升,并能在安全范围之内,灵活调整角度,可以做出传统升降平台无法完成的举升动作,精确调整平台的位置。
21.结合图4、5、6所示,在本发明的实施例中,绝缘拉绳设备2包括绝缘绳21、导向轮22、导向轮安装支架23、导向轮伸缩支架24、调节螺母25、排绳器26、拉绳绞盘27、同步带轮28、同步带29、伺服动力组件210、安装底板211、回转圆盘212、圆盘支撑件213、外罩214、提手215和设备安装支架215。
22.结合图4所示,在本发明的实施例中,绝缘拉绳设备2的外罩214固定在安装底板211上,起到装饰、防护的作用;同时外罩214上还安装有至少1个提手215,方便本设备的搬运和携带。
23.结合图5所示,在本发明的实施例中,所述绝缘绳21一端与气柱本体1连接在一起,另一端穿过导向轮22,进入到排绳器26中,并通过排绳器26排布缠绕方向,最终整齐缠绕在拉绳绞盘27上。其中导向轮22固定在导向轮安装支架23上,其可以在上绕轴进行旋转运动;导向轮安装支架23固定在导向轮伸缩支架24末端,其能沿绝缘绳21轴线方向进行调整,从而确定导向轮22和排绳器26的合适的轴心距离,同时,在调整完成之后,可以通过调节螺母25来锁定导向轮伸缩支架24。
24.所述排绳器输入轴261为排绳器26的动力来源,其上安装有同步带轮28,通过同步
带29与绞盘长轴271上安装的同步带轮28相连,同时拉绳绞盘27与绞盘长轴271相连,绞盘长轴271两端分别通过支撑轴承273固定在绞盘支架272上,绞盘支架272为u型支架;拉绳绞盘27位于u型口中间,且能通过绞盘长轴271进行旋转运动。由此结构,当拉绳绞盘27进行旋转时,排绳器26也与其一同旋转;绞盘长轴271的另一端也安装有同步带轮28,同样通过同步带29与伺服动力组件210上安装的同步带轮28相连接。由此,当伺服动力组件210开始输出动力时,拉绳绞盘27、排绳器26都会一起作旋转运动。
25.具体地,所述伺服动力组件210由电机安装支架2101,减速机2102和伺服电机2103组成;减速机2102一端安装在电机安装支架2101上,另一端与伺服电机2103相连接,同时同步带轮28安装在减速机2102的输出轴上。
26.结合图6所示,在本发明的实施例中,导向轮伸缩支架24安装在安装底板211的背面,所述排绳器26、伺服动力组件210依次安装在安装底板211的正面,回转圆盘212通过圆盘支撑件213也安装在安装底板211的背面,导向轮伸缩支架24位于安装底板211和回转圆盘212的中间,整个设备能在回转圆盘212上进行回转运动。
27.结合图1所示,在本发明的实施例中,设备安装支架216为车辆平台安装件,当绝缘气柱升降装置安装在车辆上使用。绝缘拉绳设备2安装在设备伸缩支架2161上,设备伸缩支架2161以铰接的方式与设备固定支架2162固定在一起,并能绕铰接轴进行摆臂运动,便于调整绝缘拉绳设备2的位置。设备固定支架2162固定在车辆的车身四周,其伸缩方向垂直于车身。
28.由此,绝缘拉绳设备2借助于设备安装支架216可以安装在移动车辆上,气柱本体1和自动充放气装置3也安装在移动车辆车斗内,通过设备安装支架216,可以调整其角度和距离,使其以气柱本体1为圆心,均匀分布在四周,让绝缘绳21可以均匀,平稳的牵引气柱本体1。
29.结合图7所示,在本发明的实施例中,所述自动充放气装置3包括控制盒31、电磁阀32、气管连接件33、气罐34、气泵35、气压测量计36、排气阀37;所述控制盒31其内部安装有控制系统和能源模块,为本绝缘气柱装置提供控制指令和能源供给。同时控制盒31正面还集成有电磁阀块,其上安装有数量与气囊11个数一样的电磁阀32。每个电磁阀32通过独立的绝缘气管与每个气囊11相连。每个电磁阀32都在阀块上共用一个内部气道,该气道与气管连接件33一端相连接;气管连接件33另一端与气罐34相联通。气罐34又通过气管通道依次与气压测量计36、气泵35、排气阀37相联通。上述气罐34、气泵35安装在控制盒31的侧面,气压测量计36和排气阀37安装在气泵35上,彼此都通过气道相连。
30.当气柱本体1向上举升,气囊11需要充气时,控制系统会启动气泵35,让其往气罐34里面充气,直到气罐34的气压达到气压测量计36设定好的气压值,然后依次打开电磁阀32,按照从上往下,从高往低的顺序,依次将气柱本体1的气囊11充满气,直到达到气压设定值,以满足气柱本体1的举升负载。同样当当气柱本体1向下降,气囊11需要放气时,控制系统会依次打开电磁阀32和排气阀37,按照从下往上,从低到高的顺序,依次将气柱本体1的气囊11放完气。
31.在本发明的实施例中,绝缘气柱升降装置,不仅可以用在移动车辆或平台上,也可以直接用携带用在地面上,所用设备均都可以直接按照在地面,通过锚定等方式与地面固定,来进行升降操作。同时本绝缘气柱升降装置,不限于用在带电作业中,在任何适宜场合,
都可以进行高空作业,并能灵活且精准的调整升降装置的空中姿态和顶部升降平台的工作位置,具有非常大的应用前景。
32.本发明工作过程:首先,根据现场作业对象方位,将气柱本体1底部气囊11固定在其正下方,然后将多个绝缘拉绳设备2均匀布置在已气柱本体1为圆心的四周,无论是直接锚定在地面,还是展开设备安装支架216,都必须保证绝缘拉绳设备2都是均布在气柱本体1四周,然后将自动充放气装置3的绝缘气管依次与气柱本体1上的每个气囊11的气管快接插口16相连接好,同时将绝缘绳21从绝缘拉绳设备2中抽出,与顶部气囊11的拉力传感器15固定牢靠,此时启动所有设备,打开控制器,进行预准备动作,将气柱本体1的顶部气囊11充满气,此时多个绝缘拉绳设备2同步执行放绳子命令,将4个拉环12处的绝缘绳21长度增加,同时结合角度传感器14、拉力传感器15和测距传感器17得到的反馈信息,不断调整绝缘绳21拉力和长度,直到顶部气囊充满气,达到压力值,可以承受设定负载,同时顶部安装板13与保持水平、平稳状态为止;其次作业人员登上顶部安装板13,或作业设备在顶部安装板13上安装到位,当需要升高时,按下控制器的上升按钮,气泵35开始向气罐34内灌入气体,当达到压力值后,打开电磁阀32,依次按照从上往下,从高往低的顺序,向气柱本体1中的气囊充气,同时绝缘拉绳设备2也随之启动,绝缘绳21始终处于运动状态,继续结合角度传感器14、拉力传感器15和测距传感器17得到的反馈信息,不断调整其拉力和长度,使得顶部安装板13随着气柱本体1的各个气囊有序的充气而平稳上升,确保支撑的稳定性和顶部安装板13始终处于水平状态;然后完成高空作业后,作业人员或设备保持不动,按下控制器的下降按钮,控制系统会依次打开电磁阀32和排气阀37,按照从下往上,从低到高的顺序,依次将气柱本体1的气囊11放完,同时四周的绝缘拉绳设备2将绝缘绳21收紧,结合角度传感器14、拉力传感器15和测距传感器17得到的反馈信息,不断调整拉环处的绝缘绳21的拉力和长度,使得顶部安装板13随着气柱本体1的各个气囊有序的放气而平稳下降,确保支撑的稳定性和顶部安装板13始终处于水平状态。最终自动、安全的完成本装置的升降作业,不需要人工进行其他操作。
33.当本绝缘气柱升降装置在作业时,遇到外界环境例如大风的干扰情况下,本装置的角度传感器14和拉力传感器15会自动采集到顶部安装板13的风荷载受力和角度偏移情况,通过伺服控制系统,在可控范围内,迅速启动伺服动力组件210进行力和角度补偿,动态保证顶部安装板13的水平状态,并迅速进行下降动作,首先保证设备和人员的安全。
34.以上所述为本发明较佳实施例,对于本领域的普通技术人员而言,根据本发明的教导,在不脱离本发明的原理与精神的情况下,对实施方式所进行的改变、修改、替换和变型仍落入本发明的保护范围之内。