1.本实用新型涉及绝缘硅橡胶自粘带生产技术领域,具体为一种绝缘硅橡胶自粘带卷取机。
背景技术:
2.绝缘硅橡胶自粘带由耐高温可叠接胶带粘性无机硅橡胶制成,胶带上附有易剥离保护层,能在h级高温250℃(365
°
f)下使用,尤其适合于加包在电缆终端最外层,可耐电痕,用途面广用量大,性能优越,绝缘,防污,防盐酸,防紫外线,防水;耐氧、耐臭氧,耐寒,耐热,耐高压等特点,
3.绝缘硅橡胶自粘带卷取机是将绝缘硅橡胶自粘带卷成成品卷的机械设备。现有技术中,如cn208883178u公开的一种绝缘硅橡胶自粘带卷取机,包括导向辊、蜗杆、蜗轮、转轴、转动柱一、卷筒、防滑套、卷取辊、弹簧以及旋转电机,导向辊安装在支撑柱内侧,蜗杆安装在伺服电机后端面,蜗轮设置在蜗杆环形侧面后侧,转轴安装在蜗轮后侧,转动柱一固定在转轴后端面,该设计解决了原有的绝缘硅橡胶自粘带卷取机导向功能不够好的问题,卷取辊安装在支撑柱内侧,旋转电机装配在支撑柱内部上侧,卷筒设置在卷取辊环形侧面,防滑套设置在固定耳内侧,卷筒内部设置有弹簧,该设计解决了原有的绝缘硅橡胶自粘带卷取机调节功能不够好的问题,但是该实用新型加工的效率比较低,不能够自动化地完成分卷、切断、卸料等,所以,根据此状况,需设计一种绝缘硅橡胶自粘带卷取机。
技术实现要素:
4.本实用新型的目的在于提供一种绝缘硅橡胶自粘带卷取机,能够自动化地完成分卷、切断、卸料等,提高了加工的效率,解决了背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种绝缘硅橡胶自粘带卷取机,包括机架、设置在所述机架上的转动机构,所述转动机构包括转板,所述转板转动连接在所述机架上,所述机架的后部固定有电机架,所述电机架的外侧固定有第一电机,所述电机架的内侧固定有与第一电机输出轴传动连接的凸轮分割器,凸轮分割器的输出轴与所述转板的后部固定,所述机架上活动连接有大卷,所述机架上还转动连接有张紧辊,所述大卷上缠绕的绝缘硅橡胶自粘带经过张紧辊粘接在空绕圈上,所述转板上设置有3个工位,分别为上料工位、绕卷工位以及卸料工位,每个工位上均设置有旋转固定机构,用于固定空绕圈后并带动其转动,上料工位处设置有上料机构,用于向上料工位处输送空绕圈,绕卷工位处设置有粘接机构,用于将绝缘硅橡胶自粘带粘接固定在空绕圈上,绕卷工位与卸料工位之间设置有切断机构,用于切断绝缘硅橡胶自粘带,卸料工位处分别设置有辅助绕卷机构和卸料机构,所述卸料机构用于将成品绕圈卸下。
6.通过采用上述技术方案,设置转动机构,转动机构通过第一电机和凸轮分割器实现转动,转动机构上设有上料工位、绕卷工位以及卸料工位,实现绝缘硅橡胶自粘带卷取。
7.本实用新型进一步设置为:所述旋转固定机构包括第二电机,所述第二电机固定
在所述转板的后部,第二电机的输出轴贯穿出所述转板的前部后并固定有转盘。
8.通过采用上述技术方案,通过设置第二电机,第二电机的输出轴连接转盘,实现转盘转动。
9.本实用新型进一步设置为:还包括第三电机,所述第三电机固定在所述第二电机的后部,第二电机的输出轴为空心结构,所述转盘的前部开设有夹具槽,所述夹具槽中设置有夹具,第三电机的输出轴从第二电机输出轴的内部贯穿而出后并延伸进夹具槽中,第三电机的输出轴为螺纹结构并与所述夹具的中部螺纹连接。
10.通过采用上述技术方案,通过时设置第三电机,第二电机的输出轴为空心结构,实现第三电机驱动夹具在夹具槽中移动。
11.本实用新型进一步设置为:所述上料机构包括上料槽,所述上料槽的下部固定有支架,所述支架的下部与所述机架固定,所述机架上固定有第一固定架,所述第一固定架上固定有第一伸缩部件,第一伸缩部件的输出轴固定有推板,所述上料槽上开设有弧形槽,所述推板将弧形槽中的空绕圈推动到夹具所在位置。
12.通过采用上述技术方案,通过设置上料机构,能够将空绕圈成功推动至转盘跟前,然后夹具伸出将空绕圈固定,成功实现上料。
13.本实用新型进一步设置为:所述粘接机构包括第二固定架,所述第二固定架固定在所述机架上,所述第二固定架上固定有第二伸缩部件,第二伸缩部件的输出轴固定有紧定块,用于将绝缘硅橡胶自粘带粘接固定在空绕圈上。
14.通过采用上述技术方案,通过设置粘接机构,可以实现将绝缘硅橡胶自粘带粘接在空绕圈上。
15.本实用新型进一步设置为:所述切断机构包括第三固定架,所述第三固定架固定在所述机架上,所述第三固定架上固定有第三伸缩部件,第三伸缩部件的输出轴固定有切断块,用于切断绝缘硅橡胶自粘带,所述转板上固定有垫板,用于配合切断块完成切断。
16.通过采用上述技术方案,通过设置切断机构,在由绕卷工位切换至卸料工位时,2个工位之间的绝缘硅橡胶自粘带连在一起,切断机构可以将绝缘硅橡胶自粘带切断。
17.本实用新型进一步设置为:所述辅助绕卷机构包括第四固定架,所述第四固定架固定在所述机架上,所述第四固定架上固定有第四伸缩部件,第四伸缩部件的输出轴固定有弧形块,用于配合绕圈转动将拖下的绝缘硅橡胶自粘带缠绕在绕圈上。
18.通过采用上述技术方案,通过设置辅助绕卷机构,在切断机构切断时,成品绕圈上会拖下很长一段绝缘硅橡胶自粘带,利用可以伸缩的弧形块靠近绕圈,再带动绕圈旋转,将这部分绝缘硅橡胶自粘带缠绕在绕圈上。
19.本实用新型进一步设置为:所述卸料机构包括第五固定架,所述第五固定架固定在所述机架上,所述第五固定架固定有第四电机,第四电机的输出轴上固定有第一套杆,用于在绕圈落下后套住绕圈,所述机架上固定有第二套杆,用于在第一套杆上的绕圈落下后套住绕圈。
20.通过采用上述技术方案,通过设置卸料机构,在成品绕圈缠绕完毕后,夹具缩回,成品绕圈掉落到第一套杆上,然后第四电机旋转,又掉落到第二套杆上进行收集。
21.与现有技术相比,本实用新型的有益效果如下:
22.1、本实用新型,通过设置旋转固定机构,利用夹具伸出可以将绕圈固定,然后带动
绕圈转动,以便绝缘硅橡胶自粘带能够缠绕在绕圈上,利用夹具缩回可以解除对绕圈的固定,方便卸料;
23.2、本实用新型,通过设置上料机构,能够将空绕圈成功推动至转盘跟前,然后夹具伸出将空绕圈固定,成功实现上料,通过设置转动机构,能够带动转板在3个工位之间切换,通过设置绕卷工位,利用粘接机构将绝缘硅橡胶自粘带粘接在空绕圈上,然后通过旋转固定机构带动空绕圈旋转,即可将绝缘硅橡胶自粘带缠绕在绕圈上;
24.3、通过设置切断机构,在由绕卷工位切换至卸料工位时,2个工位之间的绝缘硅橡胶自粘带连在一起,切断机构可以将绝缘硅橡胶自粘带切断,通过设置辅助绕卷机构,在切断机构切断时,成品绕圈上会拖下很长一段绝缘硅橡胶自粘带,利用可以伸缩的弧形块靠近绕圈,再带动绕圈旋转,将这部分绝缘硅橡胶自粘带缠绕在绕圈上;
25.4、本实用新型,通过设置卸料机构,在成品绕圈缠绕完毕后,夹具缩回,成品绕圈掉落到第一套杆上,然后第四电机旋转,又掉落到第二套杆上进行收集。
附图说明
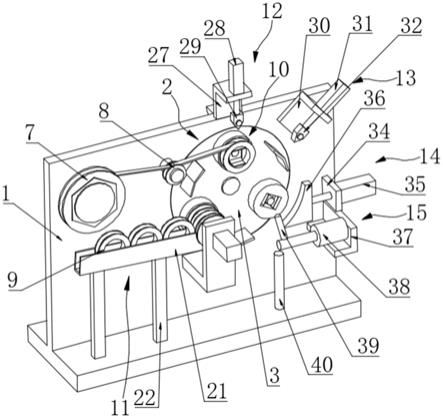
26.图1为本实用新型整体结构的立体图;
27.图2为本实用新型整体结构的另一立体图;
28.图3为本实用新型上料机构的立体图;
29.图4为本实用新型转板的前视图;
30.图5为本实用新型夹具张开状态的剖视图;
31.图6为本实用新型夹具闭合状态的剖视图。
32.图中:1、机架;2、转动机构;3、转板;4、电机架;5、第一电机;6、凸轮分割器;7、大卷;8、张紧辊;9、绕圈;10、旋转固定机构;11、上料机构;12、粘接机构;13、切断机构;14、辅助绕卷机构;15、卸料机构; 16、第二电机;17、转盘;18、第三电机;19、夹具槽;20、夹具;21、上料槽;22、支架;23、第一固定架;24、第一伸缩部件;25、推板;26、弧形槽;27、第二固定架;28、第二伸缩部件;29、紧定块;30、第三固定架; 31、第三伸缩部件;32、切断块;33、垫板;34、第四固定架;35、第四伸缩部件;36、弧形块;37、第五固定架;38、第四电机;39、第一套杆;40、第二套杆。
具体实施方式
33.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
34.实施例,请参阅图1至图6,一种绝缘硅橡胶自粘带卷取机,如图1所示,包括机架1、设置在机架1上的转动机构2,转动机构2包括转板3,转板3 转动连接在机架1上,转动连接的方式可以在机架1上开孔,该孔以及转板3 边缘开滚槽,在滚槽中过盈配合滚珠,即可实现转板3相对机架1旋转,亦可是其他方式,机架1的后部固定有电机架4,电机架4的外侧固定有第一电机5,电机架4的内侧固定有与第一电机5输出轴传动连接的凸轮分割器6,凸轮分割器6可以将转板3的转动过程分割成3个工位,凸轮分割器6的输出轴与转板3的后部固
定,凸轮分割器6是公知技术,本实施例中不再对其详细描述,机架1上活动连接有大卷7,大卷7上缠绕有很厚的绝缘硅橡胶自粘带卷,本卷取机就是将大卷7上的绝缘硅橡胶自粘带卷分卷到各个绕圈9 上,其中大卷7是可以从机架1上拆卸的,在分卷完可以进行更换,机架1 上还转动连接有张紧辊8,可以对绝缘硅橡胶自粘带卷输送时进行张紧,避免松弛,只有在每次重新装填大卷7时,需要手动地将大卷7上缠绕的绝缘硅橡胶自粘带经过张紧辊8粘接在空绕圈9上,后续分卷时就不需要手动这样操作了,
35.如图1、图2和图6所示,转板3上设置有3个工位,分别为上料工位、绕卷工位以及卸料工位,每个工位上均设置有旋转固定机构10,用于固定空绕圈9后并带动其转动,旋转固定机构10包括第二电机16,第二电机16固定在转板3的后部,第二电机16的输出轴贯穿出转板3的前部后并固定有转盘17,还包括第三电机18,第三电机18固定在第二电机16的后部,第二电机16的输出轴为空心结构,转盘17的前部开设有夹具槽19,夹具槽19中设置有夹具20,第三电机18的输出轴从第二电机16输出轴的内部贯穿而出后并延伸进夹具槽19中,第三电机18的输出轴为螺纹结构并与夹具20的中部螺纹连接,其中夹具20与绕圈9固定的原理是这样的:在第二电机16不转的前提下,第三电机18顺转,夹具20从夹具槽19伸出,然后从绕圈9的内侧将绕圈9固定,反之如果第三电机18逆转,夹具20缩回夹具槽19中,夹具槽19槽内空间略窄于夹具20,所以在夹具20缩回时,夹具20向中间闭合靠拢,体积缩小,即可解除对绕圈9的固定,夹具20是一种具有弹性的钢片,在夹具20逐渐从夹具槽19中伸出时,由于弹性应力,夹具20张开释放,就可以从里侧方向将绕圈9固定,
36.其中通过夹具20带动绕圈9转动的原理是这样的:在夹具20已经将绕圈9固定的前提下,第三电机18与第二电机16做相同方向上的相同转速,此时即可带动转盘17转动,带动已经固定的绕圈9转动,在此期间,由于第三电机18与第二电机16之间的轴是保持相对静止的,所以夹具20对于绕圈 9的固定状态不改变,即可将绝缘硅橡胶自粘带缠绕在绕圈9上,
37.如图1、图3所示,上料工位处设置有上料机构11,用于向上料工位处输送空绕圈9,上料机构11包括上料槽21,上料槽21的下部固定有支架22,上料槽21朝着转板3方向倾斜向下设置的,在前一个空绕圈9推走时,后一个空绕圈9后来居上,支架22的下部与机架1固定,机架1上固定有第一固定架23,第一固定架23上固定有第一伸缩部件24,第一伸缩部件24的输出轴固定有推板25,上料槽21上开设有弧形槽26,推板25将弧形槽26中的空绕圈9推动到夹具20所在位置,绕卷工位处设置有粘接机构12,除第一次重新装填大卷7时,需要手动地将大卷7上缠绕的绝缘硅橡胶自粘带经过张紧辊8粘接在空绕圈9上,其他的时候粘接机构12动作,将绝缘硅橡胶自粘带粘接固定在空绕圈9上,以便在空绕圈9转动时带动绝缘硅橡胶自粘带完成缠绕,粘接机构12包括第二固定架27,第二固定架27固定在机架1上,第二固定架27上固定有第二伸缩部件28,第二伸缩部件28的输出轴固定有紧定块29,用于将绝缘硅橡胶自粘带粘接固定在空绕圈9上,以便绝缘硅橡胶自粘带能够在该空绕圈9上缠绕,
38.如图1、图3和图4所示,绕卷工位与卸料工位之间设置有切断机构13,用于切断绝缘硅橡胶自粘带,因为在绕卷工位上的绕圈9绕满后,成品绕圈9 转动到下1个工位即卸料工位处,此时绕卷工位与卸料工位之间的绝缘硅橡胶自粘带拉得很长,遂设计切断机构13将其切断,切断机构13包括第三固定架30,第三固定架30固定在机架1上,第三固定架30上固定有第三伸缩部件31,第三伸缩部件31的输出轴固定有切断块32,用于切断绝缘硅橡胶自粘带,转板3上固定有垫板33,用于配合切断块32完成切断,卸料工位处分别设置有辅助
绕卷机构14和卸料机构15,卸料机构15用于将成品绕圈9 卸下,切断机构13切断之前,绕卷工位与卸料工位之间的绝缘硅橡胶自粘带拉得很长,切断之后,卸料工位处会多出一段很长的绝缘硅橡胶自粘带没有缠绕,但是由于这一段很长,如果没有辅助绕卷机构14配合,绝缘硅橡胶自粘带绕卷时不与绕圈9贴牢,辅助绕卷机构14包括第四固定架34,第四固定架34固定在机架1上,第四固定架34上固定有第四伸缩部件35,第四伸缩部件35的输出轴固定有弧形块36,弧形块36的弧线与绕圈9表面曲线适配,当弧形块36移动到快接近绕圈9的位置时,此时绕圈9转动,有利于绝缘硅橡胶自粘带缠绕并贴牢在绕圈9上,
39.如图1、图4和图6所示,卸料工位处成品绕圈9缠绕完毕后,第二电机 16不转,第三电机18逆转,夹具20回到夹具槽19中,成品绕圈9掉落,需要进行收集,遂设计卸料机构15,卸料机构15包括第五固定架37,第五固定架37固定在机架1上,第五固定架37固定有第四电机38,第四电机38的输出轴上固定有第一套杆39,用于在绕圈9落下后套住绕圈9,机架1上固定有第二套杆40,用于在第一套杆39上的绕圈9落下后套住绕圈9,上述第一伸缩部件24、第二伸缩部件28、第三伸缩部件31、第四伸缩部件35可以是气缸或电动推杆,上述张紧辊8、垫板33可以是磨砂玻璃材质,磨砂玻璃不易与绝缘硅橡胶自粘带的胶面粘接,也不会在绝缘硅橡胶自粘带输送时,轻易损坏绝缘硅橡胶自粘带的胶面。
40.工作原理:该绝缘硅橡胶自粘带卷取机使用时,包括以下步骤:
41.1、首先上料工位处,第一伸缩部件24带动推板25移动,将完全露在弧形槽26区域的空绕圈9推动至转盘17跟前,接着第二电机16不转,第三电机18顺转,夹具20从夹具槽19中伸出,夹具20弹性逐渐释放张开,从里侧方向将空绕圈9固定住,上料完毕,2、接着第一电机5带动凸轮分割器6 转动,凸轮分割器6带动转板3转动,转动到绕卷工位处,由于在每次重新装填大卷7时,已经手动地将大卷7上缠绕的绝缘硅橡胶自粘带经过张紧辊8 粘接在空绕圈9上,所以后续绝缘硅橡胶自粘带会在粘接机构12的动作下,将绝缘硅橡胶自粘带很轻易地粘接固定在空绕圈9上,再接着在夹具20已经将绕圈9固定的前提下,第三电机18与第二电机16做相同方向上的相同转速,此时即可带动转盘17转动,带动已经固定的绕圈9转动,即可将绝缘硅橡胶自粘带缠绕在绕圈9上;3、接着第一电机5带动凸轮分割器6转动,凸轮分割器6带动转板3转动,转动到卸料工位处,此时绕卷工位与卸料工位之间的绝缘硅橡胶自粘带拉得很长,遂设计切断机构13将其切断,切断后卸料工位处会多出一段很长的绝缘硅橡胶自粘带没有缠绕,遂设计辅助绕卷机构14,将绝缘硅橡胶自粘带绕卷时与绕圈9贴牢;具体是当弧形块36移动到快接近绕圈9的位置时,此时绕圈9转动,有利于绝缘硅橡胶自粘带缠绕并贴牢在绕圈9上;4、缠绕完毕后,第二电机16不转,第三电机18逆转,夹具20回到夹具槽19中,成品绕圈9掉落到第一套杆39上,然后第四电机38 转动,成品绕圈9掉落到第二套杆40上进行收集,
42.本实施例,旋转固定机构10在每个工位处的夹具20状态是不一样的,比如在上料工位处,第二电机16不转,第三电机18顺转,在绕卷工位处,第三电机18与第二电机16都要同速顺转,在卸料工位处,第二电机16不转,第三电机18逆转,这些电机转动的触发依靠动触点与静触点配合实现,比如在机架1的后部对应在3个工位处均设置有静触点,而每个工位上的第二电机16和第三电机18上都设置动触点,通过接触状态实现上述的运作情况,动触点与静触点是现有技术,本实施例中不再详述。
43.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,
可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。