1.本实用新型涉及工程起重机技术领域,尤其公开了一种基于机器视觉的吊具精准定位装置。
背景技术:
2.吊具锁销与载荷角件孔锁止,实现吊具与载荷的刚性连接,是一种高效的吊装连接方式,在集装箱吊载、某些大型特定载荷吊装过程中使用较为普遍。锁销与角件孔的配合间隙为毫米级,对于工作幅度与起升高度都是十余米的吊装设备,定位精度高,实现难度大。
3.在现有技术中,工程起重机工作幅度与起升高度检测精度为分米级别,缘于吊装业内安装精度不高,或者在吊装定位精度不够的情况下,通过人工使用绳索拉拽吊装物实现定点安装。可通过提高检测用传感器精度来改善吊装定位精度,但最终吊装点是回转、变幅、卷扬起升三个自由度叠加后定位的,各个机构间隙、结构形变和钢丝绳柔性等使得吊装点定位精度达不到毫米级。
4.因此,现有工程起重机吊装点定位精度达不到毫米级,是一件亟待解决的技术问题。
技术实现要素:
5.本实用新型提供了一种基于机器视觉的吊具精准定位装置,旨在解决现有工程起重机吊装点定位精度达不到毫米级的技术问题。
6.本实用新型提供一种基于机器视觉的吊具精准定位装置,包括检测系统、控制器和输出单元,其中,
7.检测系统,用于获取吊装车吊具和载荷的位置信息,检测系统包括设于吊具上的双目相机、主回转编码器和吊臂角度传感器,双目相机与载荷上的靶标配套使用,用于识别载荷上的靶标,获取载荷的位置信息;主回转编码器用于实时检测吊装车的主回转角度;吊臂角度传感器用于实时检测吊装车的吊臂幅度;
8.控制器分别与检测系统和输出单元电连接,用于采集检测系统获取的吊具和载荷的位置信息,控制输出单元做相应动作,完成吊具与载荷的对接。
9.进一步地,吊臂角度传感器包括第一角度传感器和第二角度传感器,
10.第一角度传感器设于吊装车的起竖臂处,用于实时检测起竖臂角度变化;
11.第二角度传感器设于吊装车的吊臂处,用于实时检测吊臂角度变化。
12.进一步地,双目相机包括第一双目相机和第二双目相机,第一双目相机和第二双目相机分别位于吊具的两侧,靶标包括第一靶标和第二靶标,第一靶标和第二靶标分别设于载荷的两侧。
13.进一步地,输出单元包括主回转马达,
14.主回转马达分别与控制器和主回转机构相连接,用于在控制器的指令下控制主回
转机构做主回转动作。
15.进一步地,输出单元包括变幅阀组和起竖阀组,
16.变幅阀组分别与控制器和变幅油缸相连接,用于在控制器的指令下控制变幅油缸做变幅动作;
17.起竖阀组分别与控制器和起竖油缸相连接,用于在控制器的指令下控制起竖油缸做起竖动作。
18.进一步地,输出单元包括吊具回转马达,
19.吊具回转马达分别与控制器和吊具回转机构相连接,用于在控制器的指令下控制吊具回转机构做吊具回转动作。
20.进一步地,输出单元包括吊具提升油缸阀组,
21.吊具提升油缸阀组分别与控制器和提升油缸相连接,用于在控制器的指令下控制提升油缸做提升动作。
22.进一步地,主回转编码器为绝对式编码器或增量式编码器。
23.进一步地,主回转编码器安装于主回转机构的回转中心处或安装于主回转马达上。
24.进一步地,吊具上设有锁销,载荷上对应设有与锁销相适配的角件。
25.本实用新型所取得的有益效果为:
26.本实用新型提供的基于机器视觉的吊具精准定位装置,采用检测系统、控制器和输出单元,检测系统,用于获取吊装车吊具和载荷的位置信息,控制器分别与检测系统和输出单元电连接,用于采集检测系统获取的吊具和载荷的位置信息,控制输出单元做相应动作,完成吊具与载荷的对接;检测系统包括设于吊具上的双目相机、主回转编码器和吊臂角度传感器,双目相机与载荷上的靶标配套使用,用于识别载荷上的靶标,获取载荷的位置信息;主回转编码器用于实时检测吊装车的主回转角度;吊臂角度传感器用于实时检测吊装车的吊臂幅度。本实用新型提供的基于机器视觉的吊具精准定位装置,安装在终端执行器(吊具)上,形成位置信息闭环反馈,有效消除传感器安装偏差、机构间隙和结构形变等前端传感器无法检测的各种误差,提高了控制系统的检测精度,由以前的分米级提高到毫米级;前端传感器检测与终端视觉反馈相结合,增加了检测的冗余性,提高了系统的安全性与可靠性。
附图说明
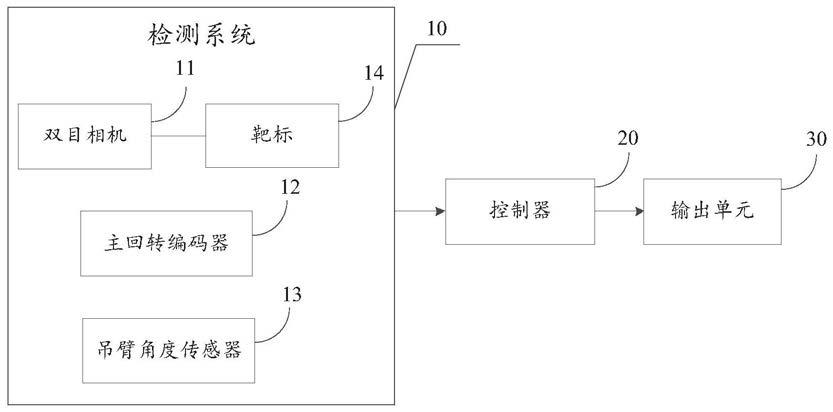
27.图1为本实用新型提供的基于机器视觉的吊具精准定位装置第一实施例的功能框图;
28.图2为图1中所示的吊臂角度传感器一实施例的功能模块示意图;
29.图3为图1中所示的双目相机和靶标配合使用时一实施例的功能模块示意图;
30.图4为本实用新型提供的基于机器视觉的吊具精准定位装置第二实施例的功能框图;
31.图5为本实用新型提供的基于机器视觉的吊具精准定位装置一实施例第一视图的安装示意图;
32.图6为本实用新型提供的基于机器视觉的吊具精准定位装置一实施例第二视图的
安装示意图。
33.附图标号说明:
34.10、检测系统;20、控制器;30、输出单元;11、双目相机;12、主回转编码器;13、吊臂角度传感器;14、靶标;131、第一角度传感器;132、第二角度传感器;111、第一双目相机;112、第二双目相机;141、第一靶标;142、第二靶标;31、主回转马达;32、变幅阀组;33、起竖阀组;34、吊具回转马达;35、吊具提升油缸阀组;100、吊具;200、载荷;110、主回转机构;120、变幅油缸;130、起竖油缸;140、吊具回转机构;150、提升油缸;160、起竖臂;170、吊臂;180、锁销;190、角件。
具体实施方式
35.为了更好的理解上述技术方案,下面将结合说明书附图以及具体的实施方式对上述技术方案做详细的说明。
36.如图1所示,本实用新型第一实施例提出一种基于机器视觉的吊具精准定位装置,包括检测系统10、控制器20和输出单元30,其中,检测系统10,用于获取吊装车吊具100和载荷200的位置信息,检测系统10包括设于吊具上的双目相机11、主回转编码器12和吊臂角度传感器13,双目相机11与载荷200上的靶标14配套使用,用于识别载荷200上的靶标14,获取载荷200的位置信息;主回转编码器12用于实时检测吊装车的主回转角度;吊臂角度传感器13用于实时检测吊装车的吊臂幅度;控制器20分别与检测系统10和输出单元30电连接,用于采集检测系统10获取的吊具和载荷的位置信息,控制输出单元30做相应动作,完成吊具100与载荷200的对接。
37.在上述结构中,进一步地,请见图2,图2为图1中所示的吊臂角度传感器一实施例的功能模块示意图,在本实施例中,吊臂角度传感器13包括第一角度传感器131和第二角度传感器132,第一角度传感器131设于吊装车的起竖臂160处,用于实时检测起竖臂角度变化;第二角度传感器132设于吊装车的吊臂170处,用于实时检测吊臂角度变化。在本实例中,通过第一角度传感器131和第二角度传感器132分别检测起竖臂角度变化和吊臂角度变化,获取吊装车的吊臂幅度,检测精度高。
38.优选地,请见图3,图3为图1中所示的双目相机和靶标配合使用时一实施例的功能模块示意图,在本实施例中,双目相机11包括第一双目相机111和第二双目相机112,第一双目相机111和第二双目相机112分别位于吊具100的两侧,靶标14包括第一靶标141和第二靶标142,第一靶标141和第二靶标142分别设于载荷200的两侧。在本实施例中,通过第一双目相机111和第二双目相机112来获取载荷200的位置信息,检测精度高。
39.进一步地,请见图4,图4为本实用新型提供的基于机器视觉的吊具精准定位装置第二实施例的功能框图,在第一实施例的基础上,输出单元30包括主回转马达31、变幅阀组32、起竖阀组33、吊具回转马达34和吊具提升油缸阀组35,其中,主回转马达31分别与控制器20和主回转机构110相连接,用于在控制器20的指令下控制主回转机构110做主回转动作。变幅阀组32分别与控制器20和变幅油缸120相连接,用于在控制器20的指令下控制变幅油缸120做变幅动作。起竖阀组33分别与控制器20和起竖油缸130相连接,用于在控制器20的指令下控制起竖油缸130做起竖动作。吊具回转马达34分别与控制器20和吊具回转机构140相连接,用于在控制器20的指令下控制吊具回转机构140做吊具回转动作。吊具提升油
缸阀组35分别与控制器20和提升油缸150相连接,用于在控制器20的指令下控制提升油缸150做提升动作。在本实施例中,主回转编码器12可以采用绝对式编码器,也可以采用增量式编码器,均在本专利的保护范围之内。主回转编码器12安装于主回转机构110的回转中心处或安装于主回转马达31上。请见图5和图6,在本实施例中,吊具100上设有锁销180,载荷200上对应设有与锁销180相适配的角件190。
40.如图1至图6所示,本实施例提供的基于机器视觉的吊具精准定位装置,其工作原理为:
41.吊装车主要由主回转机构110、起竖臂160、吊臂170和吊具100组成。吊具100左前第一双目相机111识别到载荷200的第一靶标141;吊具100右后第二双目相机112识别到载荷200上第二靶标142,经控制器20信号处理后得到第一靶标141、第二靶标142与几何中心位置。由载荷几何中心位置信息计算得出主回转目标角度和目标幅度。
42.主回转编码器12实时检测主回转角度,主回转机构110执行动作让主回转实际角度靠近其目标角度,再用实时测量的第一靶标141和第二靶标142横坐标值是否相等进行修正,构成一个双重闭环,使得主回转角度与目标角度完全重合。
43.第一角度传感器131和第二角度传感器132分别检测起竖臂和吊臂角度变化并换算成转载吊装车的吊臂幅度,起竖臂160通过起竖油缸130,吊臂170通过变幅油缸120调整工作幅度,第一角度传感器131和第二角度传感器132为幅度测控的第一个闭环,第一靶标141和第二靶标142纵坐标值是否相等为第二闭环,使得吊装车实际幅度等于目标幅度。
44.吊具回转机构140改变吊具100的偏航角,当第一靶标141和第二靶标142的实时横坐标、纵坐标与其设计位置尺寸(第一靶标141、第二靶标142相对于载荷几何中心的设计位置尺寸)相等,吊具回转到位。
45.变幅油缸120与起竖油缸130同步动作,可使吊具100及其锁销180垂直下降;吊具提升油缸150通过伸缩也可改变锁销180的高度;变幅油缸120与起竖油缸130行程长,提升油缸150行程短,两者结合将吊具锁销180垂直插入角件190,完成吊具100与载荷200的精准对接。
46.本实施例提供的基于机器视觉的吊具精准定位装置,同现有技术相比,采用检测系统、控制器和输出单元,检测系统,用于获取吊装车吊具和载荷的位置信息,控制器分别与检测系统和输出单元电连接,用于采集检测系统获取的吊具和载荷的位置信息,控制输出单元做相应动作,完成吊具与载荷的对接;检测系统包括设于吊具上的双目相机、主回转编码器和吊臂角度传感器,双目相机与载荷上的靶标配套使用,用于识别载荷上的靶标,获取载荷的位置信息;主回转编码器用于实时检测吊装车的主回转角度;吊臂角度传感器用于实时检测吊装车的吊臂幅度。本实施例提供的基于机器视觉的吊具精准定位装置,安装在终端执行器(吊具)上,形成位置信息闭环反馈,有效消除传感器安装偏差、机构间隙和结构形变等前端传感器无法检测的各种误差,提高了控制系统的检测精度,由以前的分米级提高到毫米级;前端传感器检测与终端视觉反馈相结合,增加了检测的冗余性,提高了系统的安全性与可靠性。
47.尽管已描述了本实用新型的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本实用新型范围的所有变更和修改。显然,本领域的技术人员可以
对本实用新型进行各种改动和变型而不脱离本实用新型的精神和范围。这样,倘若本实用新型的这些修改和变型属于本实用新型权利要求及其等同技术的范围之内,则本实用新型也意图包含这些改动和变型在内。