1.本实用新型涉及半导体封装设备领域,更具体涉及一种晶圆涂胶热板传送示教辅助治具。
背景技术:
2.芯片的制造过程可概分为晶圆处理工序(wafer fabrication)、晶圆针测工序(wafer probe)、构装工序(packaging)、测试工序(initial test and final test)等几个步骤。其中晶圆处理工序和晶圆针测工序为前段(front end)工序,而构装工序、测试工序为后段(back end)工序。
3.晶圆处理工序:本工序的主要工作是在晶圆上制作电路及电子元件(如晶体管、电容、逻辑开关等),其处理程序通常与产品种类和所使用的技术有关,但一般基本步骤是先将晶圆适当清洗,再在其表面进行氧化及化学气相沉积,然后进行涂膜、曝光、显影、蚀刻、离子植入、金属溅镀等反复步骤,最终在晶圆上完成数层电路及元件加工与制作。
4.现有技术对于晶圆进行涂胶处理时,将旋涂晶圆通过机械手臂传送到热板pin针(pin针高度高于限位柱)上,pin针下降到home位置(烘烤位),在生产前我们会对热板传送位置进行示教。热板上有6颗限位柱,热板限位柱范围内直径为305mm,晶圆直径为300mm,单边晶圆与限位柱间距为2.5mm,在传送示教时,晶圆传送位置判定标准以晶圆落入限位柱内侧所在圆直径内部单边1mm距离,即判定为示教合格。
5.上述现有技术,具有以下缺陷:因为涂胶机设备热板位置空间狭小,实际示教时,量测晶圆落入热板后距离限位柱间隙距离量测困难,大多以目测方式,这种情况下误差大,容易出现示教位置不准,导致晶圆搭边限位柱或者晶圆在传送时不能落入热板的情况出现。进而导致产品涂胶工艺异常甚至晶圆破裂;在此情况下,即使晶圆能够落入305范围内,由于目测误差等,难以落入限位柱内侧所在圆直径内部单边1mm距离内。
技术实现要素:
6.为了解决上述问题,本实用新型的目的在于提供了一种量测方便、容易示教、晶圆传送位置精准的晶圆涂胶热板传送示教辅助治具。
7.根据本实用新型的一个方面,提供了晶圆涂胶热板传送示教辅助治具,包括定位环、限位柱、限位环和传感器,限位柱竖直固定在涂胶热板上,限位柱设有若干,定位环上设有若干通孔,通孔的位置与限位柱的位置对应,通孔顶部设有限位环,限位环设置在限位柱的外侧,限位环外壁边缘设有传感器。
8.在一些实施方式中,限位环的厚度为0.8mm-1.2mm。
9.在一些实施方式中,限位环贴合限位柱。
10.在一些实施方式中,传感器至少设有2个,所述传感器距离限位环外壁1.5mm。
11.在一些实施方式中,传感器为晶圆感应传感器,传感器连接数据显示装置。
12.在一些实施方式中,限位柱上设有定位凹槽,限位环内壁设有与定位凹槽匹配的
定位凸起。
13.在一些实施方式中,定位环的顶部设有手柄。
14.本实用新型与现有技术相比,具有量测方便、容易示教、晶圆传送位置精准的有益效果。本实用新型所述的晶圆涂胶热板传送示教辅助治具,利用限位柱与限位环的配合便于精确的确定定位环的位置;进一步的利用传感器和数据显示装置来测量进而获取晶圆被放置的位置,再调整机械手的参数进而保证晶圆放置的位置位于涂胶热板中心。
附图说明
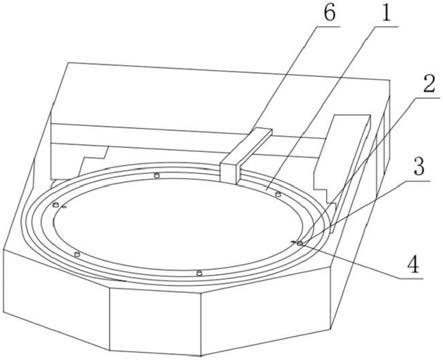
15.图1是本实用新型晶圆涂胶热板传送示教辅助治具的结构示意图;
16.图2是本实用新型晶圆涂胶热板传送示教辅助治具的定位环的结构示意图;
17.图3是本实用新型晶圆涂胶热板传送示教辅助治具的限位柱和限位环的结构示意图;
18.图4是本实用新型晶圆涂胶热板传送示教辅助治具的传感器的一实施方式的示意图。
具体实施方式
19.下面结合附图所示的各实施方式对本实用新型进行详细说明,但应当说明的是,这些实施方式并非对本实用新型的限制,本领域普通技术人员根据这些实施方式所作的功能、方法或者结构上的等效变换或替代,均属于本实用新型的保护范围之内。
20.在本实用新型的描述中,需要说明的是,除非另有规定和限定,术语
″
安装
″
、
″
相连
″
、
″
连接
″
应做广义理解,例如,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接相连,也可以通过中间媒介间接相连,对于本领域的普通技术人员而言,可以根据具体情况理解所述术语的具体含义。
21.如图1和图2所示,本实用新型所述的晶圆涂胶热板传送示教辅助治具,包括定位环1、限位柱2、限位环3和传感器4,限位柱2竖直固定在涂胶热板上,限位柱2设有若干,定位环1上设有若干通孔11,通孔11的位置与限位柱2的位置对应,通孔11顶部设有限位环3,限位环3设置在限位柱2的外侧,限位环3外壁边缘设有传感器4。利用限位柱2与限位环3的配合便于精确的确定定位环1的位置;进一步的利用传感器4和数据显示装置5来测量进而获取晶圆被放置的位置,再调整机械手的参数进而保证晶圆放置的位置位于涂胶热板中心。
22.在现有技术中:涂胶机设备热板位置空间狭小,实际示教时,量测晶圆落入热板后距离限位柱2间隙距离量测困难,大多以目测方式,这种情况下误差大,容易出现示教位置不准,导致晶圆搭边限位柱2或者晶圆在传送时不能落入热板的情况出现。进而导致产品涂胶工艺异常甚至晶圆破裂;在此情况下,即使晶圆能够落入305范围内,由于目测误差等,难以落入限位柱2内侧所在圆直径内部单边1mm距离内。
23.通过本实用新型改进以后:限位环3边缘设置的传感器4可以测量并显示晶圆边缘距离示教器边缘距离,其内径303mm小于6颗晶圆导柱内侧所在圆直径305mm,单边距离限位柱21.5mm;所以只要晶圆下落到定位限位环3限制区域内即会顺利落在盘体上表面,且可以保证晶圆示教位置距离限位柱2内侧所在圆直径内部单边1.5mm以内。当晶圆超出限位环3范围,限位环3sensor即可感应到晶圆示教位置异常,此时则需要再调整机械手臂放片位
置,重新示教,直至示教完成。此处只列举一种示教治具,对于治具的具体形式可以变化,只要治具可以在303mm范围内形成一条示教警戒线都可以满足需求。
24.改进后的示教过程如下:
25.利用机械手将晶圆传送至热板上方,并将晶圆放置于pin针上方;
26.目测判断晶圆是否能够落入限位柱2内侧所在圆直径内部单边1mm距离内;由于增加了圆形限位环3,使得判断晶圆落入限位柱2内侧所在圆直径内部单边1mm距离内的概率大大增加;
27.在晶圆落入圆形限位环3内侧所在圆直径303mm范围后;
28.利用传感器4测量的数据对晶圆继续微调;由于传感器4的加入,可以将晶圆更精确地调整至302mm范围内。
29.限位环3的厚度为0.8mm-1.2mm。限位环3的厚度最优设置成1mm的厚度,增加了圆形限位环3,使得判断晶圆落入限位柱2内侧所在圆直径内部单边1mm距离内的概率大大增加。
30.限位环3贴合限位柱2。利用限位环3贴合限位柱2,便于保证限位柱2内侧晶圆落入的空间更加精准。
31.传感器4至少设有2个,传感器4距离限位环3外壁1.5mm。至少需要两个传感器4才能准确的监测晶圆落入的位置,如果只设置一个的话只能监测晶圆上一点的位置,即便小于1.5mm也不能说明晶圆的位置准确,也可能就只有这一点距离线位柱的位置小于2.5mm,别的地方都是歪斜的,因此至少需要两个传感器4,且这两个传感器4的位置最优是对应设置。
32.如图4所示,传感器4为晶圆感应传感器4,传感器4连接数据显示装置5。传感器4通过连接线或者无线数据传输将信号反馈给数据显示装置5。通过数据显示装置5能够直观的体现晶圆落入的位置,便于对机械手进行调整。
33.如图3所示,限位柱2上设有定位凹槽21,限位环3内壁设有与定位凹槽21匹配的定位凸起31。通过定位凹槽21和定位凸起31便于使定位环1与限位柱2连接。
34.定位环1的顶部设有手柄6,定位环1、手柄6和限位环3是一体成型制成的;使用时,拿取手柄6将示教辅助治具与限位柱2配合放置在热板表面,示教完成后通过手柄6将该治具移除。
35.以上所述的仅是本实用新型的一些实施方式,应当指出,对于本领域的普通技术人员来说,在不脱离本实用新型的创造构思的前提下,还可以做出其它变形和改进,这些都属于本实用新型的保护范围。