1.本实用新型涉及输送设备领域,特别涉及一种判断上盖正反装置。
背景技术:
2.3c产品是近几年来伴随着电子产业的发展而新兴起的,主要是指计算机类(computer)、通信类(communication)、消费类(consumer)电子产品,在这一行业中,科技的发展日新月异,升级换代频繁,几乎每个月都要推出大量新产品,这也就成为产品设计的热点领域。
3.3c电子行业,产品很多都是金属件。对于智能手机或者其他电子产品来说,与外界电源连接的充电器是比不可少的零部件之一。
4.在充电器的生产过程中,需要对组成充电器的零部件进行组装,组装过程的运输、转移则是十分重要的一道工序。现有技术中,对于这一工序一般采用人工进行,比如采用中转盒人工搬运、人工上料的生产方式,其缺陷在于:其一,人工搬运成本高,效率低;其二,人工操作容易出现产品反放置,影响品质和生产效率。
技术实现要素:
5.本实用新型的目的是提供一种判断上盖正反装置,至少能够解决上述问题之一。
6.根据本实用新型的一个方面,提供了一种判断上盖正反装置,包括机体以及安装于机体的检测机构、定位治具机构和取放料机构,取放料机构用于取放和输送充电器上盖,检测机构用于检测充电器上盖的方向,定位治具机构用于承载充电器上盖且可旋转;
7.取放料机构包括多轴驱动组件和吸料组件,所述吸料组件安装于多轴驱动组件,所述多轴驱动组件用于驱动吸料组件移动。
8.由此,本实用新型的判断上盖正反装置的工作原理为:取放料机构吸取充电器上盖经过检测机构处;检测机构判别充电器上盖产品正反,取放料机构再次移动后将产品放入定位治具机构;定位治具机构在检测机构的引导下,将放反的充电器上盖产品自动旋转至正确的角度,然后再通过取放料机构吸取产品输出。本实用新型的判断上盖正反装置能够自动识别产品方向,且可对摆放错位产品进行调整,提高产品一致性,提高生产效率及良率,便于后续的生产;且全程自动进行,节省人力,降低生产人力成本。本实用新型的判断上盖正反装置的主要用于手机充电器自动组装生产线中的产品输送,能够自动判别产品正反,待前后工作站的上下料机械手完成产品取放后进行继续输送;生产过程无需人工参与,保证生产效率和产品良品率。
9.在一些实施方式中,多轴驱动组件包括x轴进给驱动模组、y轴进给驱动模组和z轴进给驱动模组,吸料组件安装于z轴进给驱动模组,z轴进给驱动模组安装于x轴进给驱动模组,x轴进给驱动模组安装于y轴进给驱动模组,y轴进给驱动模组安装于机体;
10.x轴进给驱动模组用于驱动吸料组件沿x轴方向运动;
11.y轴进给驱动模组用于驱动吸料组件沿y轴方向运动;
12.z轴进给驱动模组用于驱动吸料组件沿z轴方向运动。
13.由此,本实用新型的多轴驱动组件为三轴机构,可完成快速定位和取放料操作。
14.在一些实施方式中,吸料组件包括第一安装板以及安装于第一安装板的至少一个吸料模组,吸料模组与充电器上盖相配合。
15.在一些实施方式中,吸料组件还包括变距驱动模组,变距驱动模组用于调节各吸料模组之间的距离,变距驱动模组包括第一驱动件、第二安装板、第一导轨、第一滑块、第二导轨和第二滑块,第二安装板安装于z轴进给驱动模组,第一驱动件安装于第二安装板且驱动端与第一安装板连接,第一导轨安装于第二安装板,第一滑块安装于第一安装板的底部且套装于第一导轨的外周,第一滑块与第一导轨滑动配合,第二导轨安装于第一安装板,第一滑块安装于吸料模组的底部且套装于第二导轨的外周,第二滑块与第二导轨滑动配合,第一导轨与第二导轨相互垂直;
16.吸料组件还包括滑杆,第一安装板上开设有第一滑槽,第二安装板上开设有第二滑槽,第一滑槽、第二滑槽的数量与吸料模组的数量相对应,滑杆的一端与吸料模组连接,另一端可穿过第一滑槽与第二滑槽限位配合。
17.由此,本实用新型设置有变距驱动模组,该变距驱动模组可以实现各吸料模组的变距操作,具体工作原理为:第一驱动件伸缩,带动第一安装板以及安装于第一安装板的第一滑块沿着第一导轨滑动做升降运动,第一安装板推动滑杆沿第二滑槽滑动,进而带动各吸料模组同时沿着第二导轨聚拢或者同时沿着第二导轨分开,进而完成变距调节。
18.在一些实施方式中,吸料模组包括安装块以及与充电器上壳相配合的吸盘,吸盘安装于安装块且至少为一个,安装块的下端部通过第二滑块与第二导轨滑动配合,安装块的上端部通过滑杆与第一滑槽、第二滑槽限位配合。
19.在一些实施方式中,z轴进给驱动模组包括第一安装架和第二驱动件,第一安装架安装于x轴进给驱动模组,第二驱动件安装于第一安装架,第二驱动件的驱动端与第二安装板连接,第二驱动件能够驱动第二安装板升降。
20.在一些实施方式中,x轴进给驱动模组包括第三驱动件和第三滑块,所述第三驱动件为直线电机,第一安装架与第三滑块连接,第三滑块可滑动地套装于第三驱动件,在第三驱动件的驱动下,第三滑块可沿x轴方向水平滑动。由此,x轴进给驱动模组的工作原理为:第三驱动件驱动第三滑块滑动,带动安装于第三滑块的第一安装架滑动,进而完成吸料组件在x轴方向的进给。
21.在一些实施方式中,y轴进给驱动模组包括第四驱动件、第三安装板、第四导轨、第四滑块,第四驱动件、第四导轨均安装于机体,x轴进给驱动模组安装于第三安装板,第三安装板的底部通过第四滑块可滑动地安装于第四导轨,第四驱动件与第三安装板连接,用于驱动第四安装板沿y轴方向前后滑动。由此,y轴进给驱动模组的工作原理为:第四驱动件驱动第三安装板以及安装于第三安装板底部的第四滑块沿着第四导轨滑动,带动安装于第三安装板的x轴进给驱动模组以及安装于x轴进给驱动模组的吸料组件滑动,进而完成吸料组件在y轴方向的进给。
22.在一些实施方式中,定位治具机构包括第二安装架以及安装于第二安装架的至少一个定位治具组件,每个定位治具组件包括定位治具和旋转驱动件,第二安装架安装于机体,旋转驱动件安装于第二安装架,定位治具安装于旋转驱动件的驱动端,每个定位治具上
均开设有与充电器上盖相配合的安装槽。由此,定位治具机构可用于放置产品且可以对产品进行正反方向的调节,使得所有产品方向一致,便于后续的生产操作。
23.在一些实施方式中,定位治具机构还包括感应组件,感应组件包括感应片和感应器,感应器安装于第二安装架且位于定位治具的侧方,感应片安装于定位治具且与感应器相配合。由此,感应组件的设置可以实现旋转角度的精准控制。
24.在一些实施方式中,定位治具机构还包括接料盘,接料盘安装于第二安装架且位于定位治具组件的下方。由此,接料盘可以接住不小心掉落的产品。
25.在一些实施方式中,定位治具机构还包括废料盘,废料盘安装于第二安装架且位于定位治具的侧方。由此,废料盘用于承接不良品。
26.本实用新型的有益效果:
27.本实用新型的判断上盖正反装置能够自动识别产品方向,且可对摆放错位产品进行调整,提高产品一致性,提高生产效率及良率,便于后续的生产;且全程自动进行,节省人力,降低生产人力成本。本实用新型的判断上盖正反装置的主要用于手机充电器自动组装生产线中的产品输送,能够自动判别产品正反,待前后工作站的上下料机械手完成产品取放后进行继续输送;生产过程无需人工参与,保证生产效率和产品良品率。
附图说明
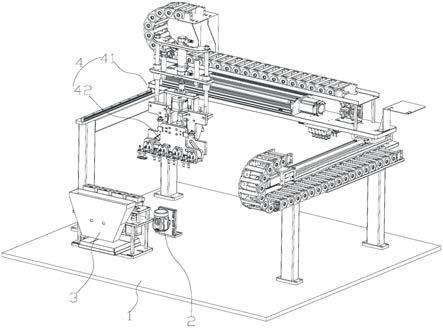
28.图1为本实用新型一实施方式的判断上盖正反装置的立体结构示意图;
29.图2为图1所示的判断上盖正反装置的俯视结构示意图;
30.图3为图1所示的判断上盖正反装置的取放料机构的立体结构示意图;
31.图4为图3所示的取放料机构的吸料组件的立体结构示意图之一;
32.图5为图3所示的取放料机构的吸料组件的立体结构示意图之二;
33.图6为图3所示的取放料机构的吸料组件的立体结构示意图之三;
34.图7为图1所示的判断上盖正反装置的定位治具机构的立体结构示意图;
35.图8为图7所示的定位治具机构的省略后的部分结构示意图。
36.图1~8中的附图标记:1-机体;2-检测机构;3-定位治具机构;4-取放料机构;5-充电器上盖;31-第二安装架;32-定位治具组件;33-感应组件;34-接料盘;35-废料盘;41-多轴驱动组件;42-吸料组件;321-定位治具;322-旋转驱动件;331-感应片;332-感应器;411-x轴进给驱动模组;412-y轴进给驱动模组;413-z轴进给驱动模组;421-第一安装板;422-吸料模组;423-变距驱动模组;424-滑杆;3211-安装槽;4111-第三驱动件;4112-第三滑块;4121-第三安装板;4122-第四导轨;4123-第四滑块;4131-第一安装架;4132-第二驱动件;4211-第一滑槽;4221-安装块;4222-吸盘;4231-第一驱动件;4232-第二安装板;4233-第一导轨;4234-第一滑块;4235-第二导轨;4236-第二滑块;4232a-第二滑槽。
具体实施方式
37.下面结合附图对本实用新型作进一步详细的说明。
38.图1~8示意性地显示了根据本实用新型的一种实施方式的判断上盖正反装置。
39.如图1~8所示,该判断上盖正反装置包括机体1以及安装于机体1的检测机构2、定位治具机构3和取放料机构4。取放料机构4用于取放和输送充电器上盖5,检测机构2用于检
测充电器上盖5的方向,定位治具机构3用于承载充电器上盖5且可旋转。
40.取放料机构4包括多轴驱动组件41和吸料组件42。所述吸料组件42安装于多轴驱动组件41,所述多轴驱动组件41用于驱动吸料组件42移动。
41.本实施方式的多轴驱动组件41可以为三轴驱动组件,多轴驱动组件41包括x轴进给驱动模组411、y轴进给驱动模组412和z轴进给驱动模组413。吸料组件42安装于z轴进给驱动模组413,z轴进给驱动模组413安装于x轴进给驱动模组411,x轴进给驱动模组411安装于y轴进给驱动模组412,y轴进给驱动模组412安装于机体1;
42.x轴进给驱动模组411用于驱动吸料组件42沿x轴方向运动;
43.y轴进给驱动模组412用于驱动吸料组件42沿y轴方向运动;
44.z轴进给驱动模组413用于驱动吸料组件42沿z轴方向运动。
45.由此,本实用新型的多轴驱动组件41为三轴机构,可完成快速定位和取放料操作。
46.如图4~6所示,吸料组件42包括第一安装板421以及安装于第一安装板421的至少一个吸料模组422,吸料模组422与充电器上盖5相配合。
47.吸料组件42还包括变距驱动模组423。变距驱动模组423用于调节各吸料模组422之间的距离。变距驱动模组423包括第一驱动件4231、第二安装板4232、第一导轨4233、第一滑块4234、第二导轨4235和第二滑块4236。本实施方式的第一驱动件4231可以为伸缩气缸。第二安装板4232安装于z轴进给驱动模组413,第一驱动件4231安装于第二安装板4232且驱动端与第一安装板421连接,第一导轨4233安装于第二安装板4232,第一滑块4234安装于第一安装板421的底部且套装于第一导轨4233的外周,第一滑块4234与第一导轨4233滑动配合,第二导轨4235安装于第一安装板421,第一滑块4234安装于吸料模组422的底部且套装于第二导轨4235的外周,第二滑块4236与第二导轨4235滑动配合。
48.第一导轨4233与第二导轨4235相互垂直,进一步的,本实施方式的第一导轨4233竖直设置,第二导轨4235横向设置。
49.吸料组件42还包括滑杆424。第一安装板421上开设有第一滑槽4211,第二安装板4232上开设有第二滑槽4232a。第一滑槽4211、第二滑槽4232a的数量与吸料模组422的数量相对应,滑杆424的一端与吸料模组422连接,另一端可穿过第一滑槽4211且通过套装的滑轮与第二滑槽4232a限位配合。本实施方式的第一滑槽4211横向设置,第二滑槽4232a沿竖直方向倾斜设置且呈八字形。
50.由此,本实用新型设置有变距驱动模组423,该变距驱动模组423可以实现各吸料模组422的变距操作,具体工作原理为:第一驱动件4231伸缩,带动第一安装板421以及安装于第一安装板421的第一滑块4234沿着第一导轨4233滑动做升降运动,第一安装板421推动滑杆424沿第二滑槽4232a滑动,进而带动各吸料模组422同时沿着第二导轨4235聚拢或者同时沿着第二导轨4235分开,进而完成变距调节。
51.吸料模组422包括安装块4221以及与充电器上壳相配合的吸盘4222。吸盘4222安装于安装块4221且至少为一个,安装块4221的下端部通过第二滑块4236与第二导轨4235滑动配合,安装块4221的上端部通过滑杆424与第一滑槽4211、第二滑槽4232a限位配合。
52.z轴进给驱动模组413包括第一安装架4131和第二驱动件4132。第一安装架4131安装于x轴进给驱动模组411。第二驱动件4132安装于第一安装架4131,第二驱动件4132的驱动端与第二安装板4232连接。本实施方式的第二驱动件4132可以为伸缩气缸。第二驱动件
4132能够驱动第二安装板4232升降。
53.x轴进给驱动模组411包括第三驱动件4111和第三滑块4112。第三驱动件4111为直线电机,第一安装架4131与第三滑块4112连接。第三滑块4112可滑动地套装于第三驱动件4111,在第三驱动件4111的驱动下,第三滑块4112可沿x轴方向水平滑动。由此,x轴进给驱动模组411的工作原理为:第三驱动件4111驱动第三滑块4112滑动,带动安装于第三滑块4112的第一安装架4131滑动,进而完成吸料组件42在x轴方向的进给。
54.y轴进给驱动模组412包括第四驱动件、第三安装板4121、第四导轨4122、第四滑块4123。第四驱动件、第四导轨4122均安装于机体1,x轴进给驱动模组411安装于第三安装板4121,第三安装板4121的底部通过第四滑块4123可滑动地安装于第四导轨4122。本实施方式的第四驱动件可以为伸缩气缸。第四驱动件与第三安装板4121连接,用于驱动第四安装板沿y轴方向前后滑动。由此,y轴进给驱动模组412的工作原理为:第四驱动件驱动第三安装板4121以及安装于第三安装板4121底部的第四滑块4123沿着第四导轨4122滑动,带动安装于第三安装板4121的x轴进给驱动模组411以及安装于x轴进给驱动模组411的吸料组件42滑动,进而完成吸料组件42在y轴方向的进给。
55.如图7和图8所示,本实施方式的定位治具机构3包括第二安装架31以及安装于第二安装架31的至少一个定位治具组件32。每个定位治具组件32包括定位治具321和旋转驱动件322,第二安装架31安装于机体1。本实施方式的旋转驱动件322可以为旋转电机。旋转驱动件322安装于第二安装架31,定位治具321安装于旋转驱动件322的驱动端,每个定位治具321上均开设有与充电器上盖5相配合的安装槽3211。由此,定位治具机构3可用于放置产品且可以对产品进行正反方向的调节,使得所有产品方向一致,便于后续的生产操作。
56.定位治具机构3还包括感应组件33。感应组件33包括感应片331和感应器332,感应器332安装于第二安装架31且位于定位治具321的侧方,感应片331安装于定位治具321且与感应器332相配合。本实施方式的感应器332可以为红外传感器等。由此,感应组件33的设置可以实现旋转角度的精准控制。
57.定位治具机构3还包括接料盘34。接料盘34安装于第二安装架31且位于定位治具组件32的下方。由此,接料盘34可以接住不小心掉落的产品。
58.定位治具机构3还包括废料盘35。废料盘35安装于第二安装架31且位于定位治具321的侧方。由此,废料盘35用于承接不良品。
59.本实用新型的检测机构2可以镜头朝上设置的ccd视觉相机。配合计算机等实现对产品方向的视觉拍摄和检测,并反馈至定位治具机构3处进行相应的操作。
60.本实用新型的判断上盖正反装置的工作原理为:
61.取放料机构4吸取充电器上盖5经过检测机构2处;检测机构2判别充电器上盖5产品正反,取放料机构4再次移动后将产品放入定位治具机构3;定位治具机构3在检测机构2的引导下,将放反的充电器上盖5产品自动旋转至正确的角度,然后再通过取放料机构4吸取产品输出。
62.本实用新型的判断上盖正反装置能够自动识别产品方向,且可对摆放错位产品进行调整,提高产品一致性,提高生产效率及良率,便于后续的生产;且全程自动进行,节省人力,降低生产人力成本。
63.本实用新型的判断上盖正反装置的主要用于手机充电器自动组装生产线中的产
品输送,能够自动判别产品正反,待前后工作站的上下料机械手完成产品取放后进行继续输送;生产过程无需人工参与,保证生产效率和产品良品率。
64.以上所述的仅是本实用新型的一些实施方式。对于本领域的普通技术人员来说,在不脱离本实用新型创造构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。