1.本实用新型涉及半导体晶振技术领域,具体为一种电子元件自动摆正定位机构。
背景技术:
2.目前电子元件在上料过程中,其位置姿态不一,不仅不便于下一工序的操作加工,而且还需人工手动将其调整摆正,耗时耗力,降低了生产效率,增加了劳动成本,为此,本领域的工作人员提出了一种电子元件自动摆正定位机构。
技术实现要素:
3.针对现有技术的不足,本实用新型提供了一种电子元件自动摆正定位机构,解决了电子元件在上料过程中,其位置姿态不一,不仅不便于下一工序的操作加工,而且还需人工手动将其调整摆正,耗时耗力,降低了生产效率,增加了劳动成本的问题。
4.为实现以上目的,本实用新型通过以下技术方案予以实现:一种电子元件自动摆正定位机构,包括安装座、升降电机和定位电机,所述升降电机的动力驱动端连接有偏心轮,所述安装座的内部贯穿有驱动杆,所述驱动杆的底部套接有过渡轮,其顶部连接有定位夹持组件;
5.所述定位夹持组件包括定位座以及与驱动杆相接的顶推杆,所述定位座的内部顶端安装有摆正台,所述定位座的内部开设有呈“十”字型结构的槽孔,且槽孔的内部通过连接件连接有夹臂,所述顶推杆的外表面开设有滚轮外推槽,所述夹臂的内侧安装有与滚轮外推槽相贴合的滚轮,其顶部则安装有定位头。
6.作为本实用新型进一步的技术方案,所述定位电机的动力驱动端套接有主动轮,所述驱动杆的外部且与主动轮相平行处套接有从动轮。
7.作为本实用新型进一步的技术方案,所述主动轮和从动轮的外部共同套设有皮带,所述安装座和驱动杆相接处均安装有轴承。
8.作为本实用新型进一步的技术方案,所述安装座的内部且位于过渡轮的上端安装有中空壳,所述驱动杆的外部且位于中空壳的内部套设有第一复位弹簧。
9.作为本实用新型进一步的技术方案,每两个所述夹臂之间的夹角均为90
°
,所述定位座与夹臂的底部共同通过第二复位弹簧形成固定连接结构。
10.作为本实用新型进一步的技术方案,所述过渡轮的底部与偏心轮的外表面相贴合,所述定位电机位于升降电机的上方。
11.有益效果
12.本实用新型提供了一种电子元件自动摆正定位机构。与现有技术相比具备以下有益效果:
13.1、一种电子元件自动摆正定位机构,通过升降电机驱动偏心轮,在过渡轮的作用下,可带动驱动杆进行升降,在滚轮外推槽和滚轮的相互配合下,可促使夹臂向外展开和向内闭合,从而达到对电子元件夹持的效果,防止在摆正调整时被甩出摆正台外,进一步保证
了位置的精准性。
14.2、一种电子元件自动摆正定位机构,在主动轮、从动轮和皮带的连接作用下,通过启动定位电机,可带动定位夹持组件进行角度旋转,从而实现对电子元件的自动摆正,本结构不仅为下一工序位置调整减少了时间消耗,而且在一定程度上,还降低了劳动成本,提高了生产效率。
附图说明
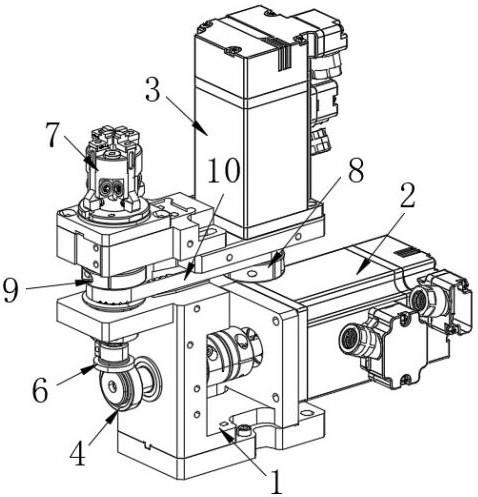
15.图1为一种电子元件自动摆正定位机构的结构示意图;
16.图2为一种电子元件自动摆正定位机构的结构前视图;
17.图3为图2中b-b的剖视图;
18.图4为一种电子元件自动摆正定位机构定位夹持组件的结构示意图;
19.图5为一种电子元件自动摆正定位机构定位夹持组件去除定位座的结构示意图;
20.图6为一种电子元件自动摆正定位机构驱动杆和顶推杆连接结构示意图。
21.图中:1、安装座;2、升降电机;3、定位电机;4、偏心轮;5、驱动杆;6、过渡轮;7、定位夹持组件;71、定位座;72、摆正台;73、连接件;74、夹臂;75、顶推杆;76、滚轮外推槽;77、滚轮;78、定位头;79、第二复位弹簧;8、主动轮;9、从动轮;10、皮带;12、中空壳;13、第一复位弹簧。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.请参阅图1-3,本实用新型提供一种电子元件自动摆正定位机构技术方案:一种电子元件自动摆正定位机构,包括安装座1、升降电机2和定位电机3,定位电机3位于升降电机2的上方,升降电机2的动力驱动端连接有偏心轮4,安装座1的内部贯穿有驱动杆5,驱动杆5的底部套接有过渡轮6,过渡轮6的底部与偏心轮4的外表面相贴合,其顶部连接有定位夹持组件7,定位电机3的动力驱动端套接有主动轮8,驱动杆5的外部且与主动轮8相平行处套接有从动轮9,主动轮8和从动轮9的外部共同套设有皮带10,安装座1和驱动杆5相接处均安装有轴承,安装座1的内部且位于过渡轮6的上端安装有中空壳12,驱动杆5的外部且位于中空壳12的内部套设有第一复位弹簧13,通过启动定位电机3,其动力驱动端可带动主动轮8旋转,在皮带10和从动轮9的作用下,可促使驱动杆5和定位夹持组件7进行同步旋转,从而达到对电子元件自动摆正的效果,本结构不仅为下一工序位置调整减少了时间消耗,而且在一定程度上,还降低了劳动成本,提高了生产效率。
24.请参阅图4-6,定位夹持组件7包括定位座71以及与驱动杆5相接的顶推杆75,定位座71的内部顶端安装有摆正台72,定位座71的内部开设有呈“十”字型结构的槽孔,且槽孔的内部通过连接件73连接有夹臂74,顶推杆75的外表面开设有滚轮外推槽76,夹臂74的内侧安装有与滚轮外推槽76相贴合的滚轮77,其顶部则安装有定位头78,每两个夹臂74之间的夹角均为90
°
,定位座71与夹臂74的底部共同通过第二复位弹簧79形成固定连接结构,通
过升降电机2驱动偏心轮4,在过渡轮6的作用下,可带动驱动杆5进行升降,在滚轮外推槽76和滚轮77的相互配合下,可促使夹臂74向外展开和向内闭合,从而达到对电子元件夹持的效果,防止在摆正调整时被甩出摆正台外,进一步保证了位置的精准性。
25.本实用新型的工作原理:在使用时,当上料机构将电子元件移动到定位夹持组件7的上方时,可相应启动升降电机2,其动力驱动端可带动偏心轮4进行旋转,在过渡轮6的作用下,可带动驱动杆5进行升降,当驱动杆5上升时,在滚轮外推槽76和滚轮77的相互挤压作用下,可促使夹臂74外翻,此时上料机构下压,将电子元件放在摆正台72上即可,而当驱动杆5下降时,第一复位弹簧13恢复弹力,滚轮77滚动则至滚轮外推槽76的内部,从而促使夹臂74内收,进而实现定位头78对电子元件的夹持。
26.待夹持完毕后,可驱动定位电机3,其动力驱动端可带动主动轮8旋转,在皮带10和从动轮9的作用下,可同步带动驱动杆5和定位夹持组件7进行全方位角度旋转,直至将摆正台72上的电子元件摆正即可。
技术特征:
1.一种电子元件自动摆正定位机构,包括安装座(1)、升降电机(2)和定位电机(3),其特征在于,所述升降电机(2)的动力驱动端连接有偏心轮(4),所述安装座(1)的内部贯穿有驱动杆(5),所述驱动杆(5)的底部套接有过渡轮(6),其顶部连接有定位夹持组件(7);所述定位夹持组件(7)包括定位座(71)以及与驱动杆(5)相接的顶推杆(75),所述定位座(71)的内部顶端安装有摆正台(72),所述定位座(71)的内部开设有呈“十”字型结构的槽孔,且槽孔的内部通过连接件(73)连接有夹臂(74),所述顶推杆(75)的外表面开设有滚轮外推槽(76),所述夹臂(74)的内侧安装有与滚轮外推槽(76)相贴合的滚轮(77),其顶部则安装有定位头(78)。2.根据权利要求1所述的一种电子元件自动摆正定位机构,其特征在于,所述定位电机(3)的动力驱动端套接有主动轮(8),所述驱动杆(5)的外部且与主动轮(8)相平行处套接有从动轮(9)。3.根据权利要求2所述的一种电子元件自动摆正定位机构,其特征在于,所述主动轮(8)和从动轮(9)的外部共同套设有皮带(10),所述安装座(1)和驱动杆(5)相接处均安装有轴承。4.根据权利要求1所述的一种电子元件自动摆正定位机构,其特征在于,所述安装座(1)的内部且位于过渡轮(6)的上端安装有中空壳(12),所述驱动杆(5)的外部且位于中空壳(12)的内部套设有第一复位弹簧(13)。5.根据权利要求1所述的一种电子元件自动摆正定位机构,其特征在于,每两个所述夹臂(74)之间的夹角均为90
°
,所述定位座(71)与夹臂(74)的底部共同通过第二复位弹簧(79)形成固定连接结构。6.根据权利要求1所述的一种电子元件自动摆正定位机构,其特征在于,所述过渡轮(6)的底部与偏心轮(4)的外表面相贴合,所述定位电机(3)位于升降电机(2)的上方。
技术总结
本实用新型公开了一种电子元件自动摆正定位机构,涉及半导体晶振技术领域,升降电机的动力驱动端连接有偏心轮,安装座的内部贯穿有驱动杆,驱动杆的底部套接有过渡轮,其顶部连接有定位夹持组件,夹持组件包括定位座以及与驱动杆相接的顶推杆,定位座的内部顶端安装有摆正台,定位座的内部开设有槽孔,且槽孔的内部通过连接件连接有夹臂,顶推杆的外表面开设有滚轮外推槽,夹臂的内侧安装有与滚轮外推槽相贴合的滚轮,其顶部则安装有定位头,本结构不仅可实现对电子元件的定位,防止在摆正调整时被甩出摆正台外,而且还可对电子元件进行自动摆正,为下一工序位置调整减少了时间消耗,同时还降低了劳动成本,提高了生产效率。提高了生产效率。提高了生产效率。
技术研发人员:唐新君 卓维煌 唐升平 高威 张鑫 胡松华
受保护的技术使用者:深圳市铭宇泰科技有限公司
技术研发日:2021.09.18
技术公布日:2022/2/19