1.本实用新型涉及一种平衡稳定装置,具体涉及一种防倾倒装置及具有该防倾倒装置的越野车。
背景技术:
2.随着生活质量的提高,家长带领操作者体验新奇项目的机会逐渐增多,越野车这一项目出现在了市面上,让孩子们体验更刺激的项目和保障孩子在体验项目时的安全这两点就是必须要解决的问题。
3.针对于越野车来说,车身的颠簸和不平衡是必然的,通常为了防止越野车出现侧翻,商家会把赛道设计得更平缓一些,这就直接的降低了越野车的趣味性。而且,操作者由于天生看见新鲜事物产生的好奇心,会令其在操作中出现意想不到的额外晃动,更容易导致越野车的侧翻,带来了更大的安全隐患。
4.因此,如何防止越野车的侧翻,是目前需要解决的一个问题。
技术实现要素:
5.实用新型目的:提供一种防倾倒装置,以解决现有技术存在的上述问题。
6.技术方案:一种防倾倒装置,包括:运动组件,其包括蜗杆、底座和电机,所述电机固定安装在所述底座上,所述蜗杆与所述电机的输出轴键连接;配重,所述配重与所述蜗杆滑动连接;控制系统,所述控制系统控制所述运动组件从而驱动所述配重的滑动。
7.在进一步的实施例中,所述配重上设置有通孔,且所述通孔中设置有内螺纹,所述内螺纹与所述蜗杆的外螺纹相匹配;且所述底座上开有一条凹槽,所述配重下方设置有凸起,所述凸起与所述凹槽相互配合,防止所述配重转动并起到导向作用。
8.在进一步的实施例中,所述底座上设置有两个凸台,两个所述凸台上分别设置有蜗杆通孔,所述蜗杆通孔在同一条直线上,且两个所述蜗杆通孔内分别设置有滚珠轴承,所述滚珠轴承连接底座与蜗杆。
9.在进一步的实施例中,所述运动组件还包括连接件,所述连接件为宽度不短于电机边长的角铝;所述连接件的直角两侧都打有电机通孔,电机螺栓螺杆通过所述连接件的一侧电机通孔将所述电机与所述固定件固定,电机螺栓螺杆通过所述连接件的另一侧电机通孔将所述连接件与所述底座固定。
10.在进一步的实施例中,所述底座上还设置有底座通孔,底座螺栓螺杆通过所述底座通孔与所述车底板固定连接。
11.一种越野车,包括车架,固定在所述车架底部的车底板,以及上述防倾倒装置,所述防倾倒装置分别安置在所述车底板前端和后端。
12.有益效果:本实用新型涉及一种防倾倒装置及具有该防倾倒装置的越野车,从配重方面来看,在越野车底板上增加了两块配重,可以使得越野车整体重心下移,令越野车具有更强的稳定性;同时越野车在行驶过程中,实时检测越野车的平衡情况,通过调整配重位
置的方式调整越野车的重心位置,主动的从源头上降低了越野车侧翻的可能性,在不降低越野车趣味性的同时保障了操作者的安全。
附图说明
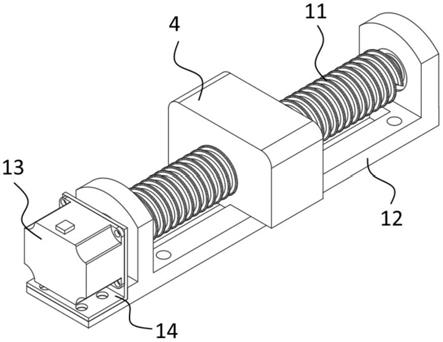
13.图1是本实用新型中越野车防侧倾装置的结构示意图。
14.图2是本实用新型中越野车防侧倾装置的布局示意图。
15.图3是本实用新型中越野车防侧倾装置的仰视图。
16.图中各附图标记为:运动组件-1、蜗杆-11、底座-12、电机-13、连接件-14、底座通孔-1a、凹槽-1b、车底板-2、车架-3、配重-4。
具体实施方式
17.在下文的描述中,给出了大量具体的细节以便提供对本实用新型更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本实用新型可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本实用新型发生混淆,对于本领域公知的一些技术特征未进行描述。
18.如图2所示,为平衡配重自己的重力,在操作者平衡车上安装有两套放侧倾装置,安置位置在越野车底板的最前端和最后端,两者离平衡车重心的距离基本一致,且两套放侧倾装置本身的重心应处于越野车的中心线上,保证装置对越野车的平衡没有多余的破坏。
19.如图1和图3所示,电机13直接与蜗杆11相连接,电机13转动,与之键连接的蜗杆11进行转动,配重就能沿着蜗杆11进行移动。配重内部需要旋有内螺纹,所述内螺纹要与所述蜗杆螺纹相匹配,一旦电机开始转动,通过蜗杆11和配重之间的螺旋配合结构就能达到将电机13的转动转变为配重的平移,且通过螺纹的参数设能够将电机13的转速进行减速,不至于让配重平移过快,减小电机13的输出功率。这样一来,就不会因为配重过大的加速度让电机13需要输出过大的功率,从而能够减小电流,保护电路。
20.所述蜗杆11贯穿于“u”型底座12,所述“u”型底座12两侧开有大小相等的通孔,通孔位于同一条直线上,所述通孔内都放有滚珠轴承,承接底座12和蜗杆11,令蜗杆11能够自由旋转。所述底座12下方设置有4个电机通孔、4个底座通孔和一条凹槽1b,所述凹槽1b用于限制配重移动的距离,也能保证配重不随蜗杆11旋转而一起旋转。所述8个通孔均与下方的越野车底板进行螺栓连接,固定在越野车底板上,螺栓螺杆通过4个底座通孔将底座与汽车底板连接,螺栓螺杆通过4个电机通孔将连接件14与底座相固定。所述电机连接件14用宽度与电机13边长相等的角铝制作,两侧均有4个通孔,一侧与电机13用螺栓相连接,一侧与越野车底板相连接。
21.在越野车底板上安装有三轴陀螺仪和三轴加速度计,三轴陀螺仪用来检测动态的角速度,将得到数据进行积分可以得到动态的角度,所述角度为越野车垂直方向与重力加速度方向的夹角;加速度计用于检测静止时的角度,将两个角度的数据结合起来,传输给主控芯片。
22.主控芯片优选的可采用st(意法半导体)f4系列主控芯片,该芯片采用cortex—m4构架实现低功耗与高新能的兼容,该芯片还具有低功耗休眠的功能,可以实现超长的续航
能力。主控芯片根据陀螺仪和加速度计传输的数据进行分析、整合、处理,判断出此时操作者平衡车正处于什么样的状态,将数据进行滤波,得到精确的瞬时数据,实施输出给电机驱动模块。
23.电机驱动模块,电机驱动模块可采用4n半桥式驱动方案,利用pwm控制技术控制电机转速和扭矩,该方案具有光耦隔离,可实现驱动模块和主控芯片间的信号隔离,还具有大电流输出,低发热量等特性。主控芯片不仅传输pwm波,还要给电机驱动模块正反转信号,一般来说角度越大,pwm波占空比越大,电机转速越快。
24.需要注意的是,在控制电机驱动模块时,需要同时控制两个电机,使得两套防侧倾系统同时工作,同时停止,两块配重移速,移动的距离也要保持一致,才能起到两者相互平衡的状态,不会额外破坏越野车的平衡。
25.具体工作步骤:
26.s1、三轴陀螺仪传感器检测动态的角速度,将得到的数据进行积分可以得到动态的角度,所述角度为越野车垂直方向与重力加速度方向的夹角;三轴角加速度计传感器用于检测静止时的角度,将两个角度的数据结合起来,可以实时准确的检测越野车重力的垂直分量与重力方向的夹角,传输给主控芯片。
27.s2、主控芯片根据三轴陀螺仪传感器和三轴角加速度计传感器传输的数据进行分析、整合、处理,判断出此时越野车正处于什么样的状态,主控芯片将传输给主控芯片的数据进行滤波,得到精确的瞬时数据,实施输出给电机驱动模块。若此时检测的汽车向一侧倾斜,则通过传感器的检测由主控芯片处理后得到倾斜的角度,将需要调整的重心位置信息通过电信号传输给电机驱动模块。
28.s3、所述电机驱动模块,同时控制两套越野车防侧倾装置的电机在转动,驱动配重以相同的速度和方向并移动相同的距离,使配重朝倾斜的另一次移动,随着配重的位置发生改变,使得越野车的重心位置发生变化,从而使越野车趋于平稳状态。
29.s4、可以通过程序的设置在延迟一定的时间后主控芯片再次根据三轴陀螺仪传感器和三轴角加速度计传感器传输的数据进行分析、整合、处理,判断出此时越野车是否处于稳定状态,并输出信号控制电机驱动模块。所述电机驱动模块,驱动配重移动到初始位置或者继续对配重位置进行调节,重复步骤s4,使小车一直处于平衡状态。
30.如上所述,尽管参照特定的优选实施例已经表示和表述了本实用新型,但其不得解释为对本实用新型自身的限制。在不脱离所附权利要求定义的本实用新型的精神和范围前提下,可对其在形式上和细节上做出各种变化。