1.本发明涉及汽车控制技术领域,尤其涉及一种线控低速灵活性调节控制方法和系统。
背景技术:
2.传统汽车控制技术领域中,通常采用前轮转方式控制车辆的转向,在车辆转向过程中,后轴不会主动转向,基于车辆结构及动力学分析,当方向盘朝某个方向打死时,车辆依旧会有一个较大的转弯半径,同时根据不同的轴距和转向角限制,车辆很难实现在狭窄空间内脱困,低速驾驶车辆灵活性较差。
3.现有的技术方案局限于前轮转弯,后轴无法主动转动,当方向盘朝某个方向打死时,车辆依旧会有一个较大的转弯半径,狭窄范围内行使,车辆驾驶灵活性差,甚至在某些环境车辆无法脱困。
技术实现要素:
4.本发明要解决的技术问题是:提供一种线控低速灵活性调节控制方法和系统,能够提高转弯半径过大时低速行驶车辆的灵活性,提升车辆操作稳定性。
5.为解决上述技术问题,本发明采用的技术方案是:
6.一种线控低速灵活性调节控制方法,具体包括如下步骤:
7.s1,判断车辆是否处于前进档,若是,则执行步骤s3,若否,则执行步骤s2;
8.s2,判断车辆是否处于倒车档,若是,则执行步骤s3,若否,则执行步骤s7;
9.s3,判断车辆车速是否小于30km/h,若是,则执行步骤s4,若否,则执行步骤s7;
10.s4,判断车辆前轮转向角是否为零,若是,则执行步骤s5,若否,则执行步骤s6;
11.s5,后轮转向机控制模块控制执行模块不对外输出齿条拉力,使后轮转向机保持在零位;
12.s6,后轮转向机控制模块执行低速灵活性调节控制;
13.s7,低速灵活性调节控制功能不激活。
14.进一步的,所述低速灵活性调节控制,具体包括以下步骤:
15.s1,采集车辆当前车速及当前前轮转向角度;
16.s2,判断车载hmi模块中的蟹行模式开关是否打开,若是,则执行步骤s3,若否,则执行步骤s4;
17.s3,后轮转向机控制模块根据当前的车速及前轮转向角度,按照蟹行模式低速灵活性调节比例曲线,计算出当前所需的目标后轮转向角度,并执行步骤s5;
18.s4,后轮转向机控制模块根据当前的车速及前轮转向角度,按照低速灵活性控制比例曲线,计算出当前所需的目标后轮转向角度,并执行步骤s5;
19.s5,执行模块接收所述目标后轮转向角度信息并输出相应的齿条拉力,将转向力传递到后轴轮端,从而使后轮转向机完成后轮转向动作,执行所述目标后轮转向角度。
20.进一步的,所述低速灵活性控制比例曲线具体如下:
21.a、当车辆档位在前进档,车速小于30km/h时,后轮转向机控制模块采用比例值k1计算所述目标后轮转向角度w,具体公式为:
22.w=w0×
k1
23.其中,w0为当前前轮转向角度,k1为比例值;
24.b、当车辆档位在倒车档,车速小于30km/h时,后轮转向机控制模块采用比例值k2计算所述目标后轮转向角度w,具体公式为:
25.w=w0×
k1
26.其中,w0为当前前轮转向角度,k2为比例值;
27.当车速小于5km/h时,所述后轮转向机保持在零位;当车速接近30km/h时,所述目标后轮转向角度趋近于零。
28.其中,所述比例值k1为负值,所述比例值k2为正值。
29.进一步的,所述蟹行模式低速灵活性调节比例曲线具体如下:
30.a、当车辆档位在前进档,车速小于10km/h时,后轮转向机控制模块采用比例值f计算所述目标后轮转向角度w,具体为:
31.w=w0×f32.其中,w0为当前前轮转向角度,f为比例值;
33.b、当车辆档位在倒车档,车速小于10km/h时,后轮转向机控制模块采用比例值f计算所述目标后轮转向角度w,具体为:
34.w=w0×f35.其中,w0为当前前轮转向角度,f为比例值;
36.当车速大于15km/h时,所述后轮转向机保持在零位;当车速大于10km/h且不大于15km/h时,所述目标后轮转向角度绝对值逐渐变小,最终回到零位。
37.其中,所述比例值f具体为1。
38.一种线控低速灵活性调节控制系统,包括:
39.信号获取模块,用于获取方向盘转角、车辆档位和车速信号,以及车辆当前的前轮转向角和后轮转向角信号;
40.车载hmi模块,具体为车载显示屏,所述车载hmi模块中含有蟹行模式开关,用户根据需求打开或关闭所述蟹行模式开关;
41.后轮转向机控制模块,用于接收所述信号获取模块和车载hmi模块发送的信息,并进行处理和计算,判断是否执行低速灵活性调节控制以及计算目标后轮转向角度所依据的比例曲线,并将所述目标后轮转向角度信息发送给执行模块;
42.执行模块,用于接收所述目标后轮转向角度信息,并输出相应的齿条拉力,使后轮转向机完成后轮转向动作,执行所述目标后轮转向角度。
43.进一步的,所述比例曲线包括低速灵活性控制比例曲线和蟹行模式低速灵活性调节比例曲线;
44.所述信号获取模块、车载hmi模块、执行模块均通过控制线缆与所述后轮转向机控制模块连接。
45.进一步的,所述后轮转向机控制模块运行有控制程序,所述后轮转向机控制模块
运行所述控制程序时实现上述控制方法的所有方法步骤或部分方法步骤。
46.本发明与现有技术相比具有以下主要的优点:
47.1、通过搭载后轮转向机,使车辆实现四轮转向,并根据当前车辆车速和行驶轨迹执行对应的控制策略,动态调节车辆转弯半径,提高转弯半径过大时低速行驶车辆的灵活性;
48.2、提出了低速灵活性调节控制方法,能够根据当前的车速及前轮转向角度,按照特定的比例曲线计算出当前所需的目标后轮转向角度,用于实现对转弯半径的控制,能够提高转弯半径的控制精度。
49.3、根据用户需求,可选择开启蟹行模式,根据当前的车速及前轮转向角度,按照蟹行模式低速灵活性调节比例曲线计算出当前所需的目标后轮转向角度,使车辆后轮转向方向与前轮转向方向相同,能够提升车辆低速过弯时的平稳性。
50.4、提出了一种线控低速灵活性调节控制系统,通过信号获取模块、车载hmi模块、后轮转向机控制模块和执行模块相配合,能够实现本发明所述的一种线控低速灵活性调节控制方法。
附图说明
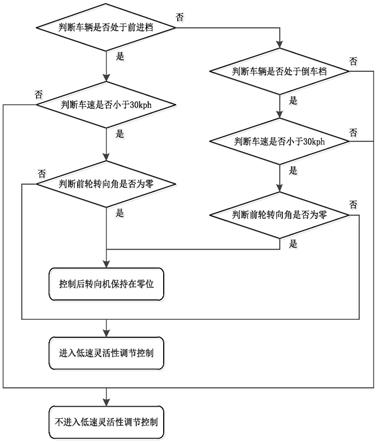
51.图1为本发明一种线控低速灵活性调节控制方法流程图;
52.图2为本发明低速灵活性调节控制流程图;
53.图3为本发明低速灵活性控制比例曲线示意图;
54.图4为本发明蟹行模式低速灵活性调节比例曲线示意图;
55.图5为本发明一种线控低速灵活性调节控制系统示意图。
具体实施方式
56.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
57.需要指出,根据实施的需要,可将本技术中描述的各个步骤/部件拆分为更多步骤/部件,也可将两个或多个步骤/部件或者步骤/部件的部分操作组合成新的步骤/部件,以实现本发明的目的。
58.一、一种线控低速灵活性调节控制方法
59.根据本发明实施的一种线控低速灵活性调节控制方法,基于搭载后轮转向机的汽车,主要解决车辆转弯半径过大导致的低速行驶车辆灵活性差的问题,而且车辆转弯半径会根据当前车辆车速及行驶轨迹动态调节,此控制过程完全通过线控完成。
60.主要采用如下控制策略:
61.a、当车辆档位处于前进档或倒车档,且车速小于30km/h、前轮转向角为零时,后轮转向机控制模块控制执行模块不对外输出齿条拉力,使后轮转向机保持在零位;
62.b、当车辆档位处于前进档或倒车档,且车速小于30km/h、前轮转向角不为零时,后轮转向机控制模块执行低速灵活性调节控制;
63.c、当车速不小于30km/h或车辆档位未处于前进档或倒车档时,所述低速灵活性调节控制功能不激活。
64.如图1所示,所述一种线控低速灵活性调节控制方法,具体包括以下步骤:
65.s1,判断车辆是否处于前进档,若是,则执行步骤s3,若否,则执行步骤s2;
66.s2,判断车辆是否处于倒车档,若是,则执行步骤s3,若否,则执行步骤s7;
67.s3,判断车辆车速是否小于30km/h,若是,则执行步骤s4,若否,则执行步骤s7;
68.s4,判断车辆前轮转向角是否为零,若是,则执行步骤s5,若否,则执行步骤s6;
69.s5,此时方向盘处于居中位置,驾驶员无转向需求,后轮转向机控制模块接收到“无转弯需求”信号,进而控制执行模块不对外输出齿条拉力,使后轮转向机保持在零位;
70.s6,此时方向盘处于非居中位置,驾驶员有转向需求,后轮转向机控制模块执行低速灵活性调节控制;
71.s7,低速灵活性调节控制功能不激活。
72.二、低速灵活性调节控制
73.如图2所示,所述低速灵活性调节控制,具体包括以下步骤:
74.s1,采集车辆当前车速及当前前轮转向角度;
75.s2,判断车载hmi模块中的蟹行模式开关是否打开,若是,则执行步骤s3,若否,则执行步骤s4;
76.s3,后轮转向机控制模块根据当前的车速及前轮转向角度,按照蟹行模式低速灵活性调节比例曲线,计算出当前所需的目标后轮转向角度,并执行步骤s5;
77.s4,后轮转向机控制模块根据当前的车速及前轮转向角度,按照低速灵活性控制比例曲线,计算出当前所需的目标后轮转向角度,并执行步骤s5;
78.s5,通过后轮转向机电机运转产生转向力,转向力通过执行模块输出拉杆拉力,将转向力传递到后轴轮端,从而使后轮转向机完成后轮转向动作,执行所述目标后轮转向角度。
79.三、低速灵活性控制比例曲线
80.如图3所示,所述低速灵活性控制比例曲线具体如下:
81.a、当车辆档位在前进档,车速小于30km/h时,后轮转向机控制模块采用比例值k1计算所述目标后轮转向角度w,具体公式为:
82.w=w0×
k1
83.其中,w0为当前前轮转向角度,k1为比例值;
84.b、当车辆档位在倒车档,车速小于30km/h时,后轮转向机控制模块采用比例值k2计算所述目标后轮转向角度w,具体公式为:
85.w=w0×
k1
86.其中,w0为当前前轮转向角度,k2为比例值;
87.当车速小于5km/h时,所述后轮转向机保持在零位;当车速接近30km/h时,所述目标后轮转向角度趋近于零。
88.进一步的,所述比例值k1为负值,代表后轮转向方向与前轮转向方向相反;所述比例值k2为正值,代表后轮转向方向与前轮转向方向相同。
89.四、蟹行模式低速灵活性调节比例曲线
90.如图4所示,所述蟹行模式低速灵活性调节比例曲线具体如下:
91.a、当车辆档位在前进档,车速小于10km/h时,后轮转向机控制模块采用比例值f计算所述目标后轮转向角度w,具体为:
92.w=w0×f93.其中,w0为当前前轮转向角度,f为比例值;
94.b、当车辆档位在倒车档,车速小于10km/h时,后轮转向机控制模块采用比例值f计算所述目标后轮转向角度w,具体为:
95.w=w0×f96.其中,w0为当前前轮转向角度,f为比例值;
97.当车速大于15km/h时,所述后轮转向机保持在零位;当车速大于10km/h且不大于15km/h时,所述目标后轮转向角度绝对值逐渐变小,最终回到零位。
98.进一步的,所述比例值f为1,代表后轮转向方向与前轮转向方向相同。
99.更进一步的,在所述蟹行模式下,所述目标后轮转向角度绝对值不大于10度。
100.五、一种线控低速灵活性调节控制系统
101.基于同一发明构思,本技术实施例还提供了一种线控低速灵活性调节控制系统,如图5所示,包括:
102.信号获取模块,用于获取方向盘转角、车辆档位和车速信号,以及车辆当前的前轮转向角和后轮转向角信号;
103.车载hmi模块,具体为车载显示屏,所述车载hmi模块中含有蟹行模式开关,用户可根据需求打开或关闭所述蟹行模式开关;
104.后轮转向机控制模块,用于接收所述信号获取模块和车载hmi模块发送的信息,并进行处理和计算,判断是否执行低速灵活性调节控制以及计算目标后轮转向角度所依据的比例曲线,并将所述目标后轮转向角度信息发送给执行模块;
105.执行模块,用于接收所述目标后轮转向角度信息,并输出相应的齿条拉力,使后轮转向机完成后轮转向动作,执行所述目标后轮转向角度;
106.所述信号获取模块、车载hmi模块、执行模块均通过控制线缆与所述后轮转向机控制模块连接;
107.所述比例曲线包括低速灵活性控制比例曲线和蟹行模式低速灵活性调节比例曲线。
108.进一步的,所述后轮转向机控制模块运行有控制程序,所述后轮转向机控制模块运行所述控制程序时实现上述控制方法的所有方法步骤或部分方法步骤。
109.本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。