1.本实用新型涉及无人系统技术领域,尤其是涉及一种遥控式多关节深海巡检无人系统。
背景技术:
2.近年来,随着越来越多的水下设施被布放在海底,遥控式无人系统被应用于水下油气生产系统、海底观测网等水下设施的巡检。目前大多数遥控式无人系统均为单体刚性结构,在日益复杂的水下设施中不具备很好的通过性,且较为笨重,运动不灵活。水下蛇形无人系统具有良好的灵活性和通过性,采用模仿蛇类运动的仿生驱动方式,为了维持向前运动身躯需要不停摆动,运动稳定性不足。由于涉及复杂的水动力学建模,难以获得高精度的控制效果,通常不具备稳定的水下探测能力,无法胜任对水下设施的巡检任务。
技术实现要素:
3.本实用新型的目的就是为了克服上述现有技术存在的缺陷而提供一种遥控式多关节深海巡检无人系统。
4.本实用新型的目的可以通过以下技术方案来实现:
5.一种遥控式多关节深海巡检无人系统,包括依次柔性连接的头部舱、中部舱和尾部舱,各舱体分别设有推进器,所述中部舱搭载有水下传感器,且内部设有用以控制推进器的运动控制模块,所述尾部舱通过线缆连接位于水面之上的控制柜,所述运动控制模块连接位于水面之上的计算机,所述控制柜与所述计算机连接。
6.优选地,所述头部舱通过柔性关节连接所述中部舱,所述中部舱通过柔性关节连接所述尾部舱。
7.优选地,所述头部舱包括前视声纳、头部舱前端盖、照明灯、摄像头、头部舱筒身、头部推进器、头部舱后端盖、头部舱内部支架、单板计算机和第一柔性关节驱动模块,所述头部舱前端盖、所述头部舱后端盖分别位于头部舱筒身的前端和后端,所述前视声纳、所述照明灯与所述摄像头安装于所述头部舱前端盖上,并与所述运动控制模块连接;两个头部推进器分别设于所述头部舱的左、右两侧,二者的推进方向互相垂直,且各自的推进方向与头部舱筒身的筒身轴向方向呈45度夹角;所述头部舱后端盖上设有用以安装第一水密连接端子的通孔,所述第一水密连接端子连接柔性关节,所述头部舱内部支架设于所述头部舱筒身的内部,所述单板计算机、所述第一柔性关节驱动模块安装于所述头部舱内部支架上;所述单板计算机与水面之上的计算机无线连接,所述第一柔性关节驱动模块的一端与所述运动控制模块连接,另一端与柔性关节连接。
8.优选地,所述中部舱包括中部舱筒身,设于中部舱筒身两端的中部舱端盖,设于中部舱筒身外壁上的中部推进器,设于中部舱筒身底部的水下传感器以及设于中部舱筒身内部的所述运动控制模块,两个所述中部推进器设于中部舱筒身外壁的上、下两侧,二者的推进方向相同且与中部舱筒身方向垂直,所述水下传感器连接所述单板计算机。
9.优选地,所述水下传感器包括激光成像仪、多普勒速度仪、浅地层剖面仪和水声信标,所述激光成像仪、所述多普勒速度仪和所述浅地层剖面仪设于所述中部舱筒身的底部,所述水声信标设于所述中部舱筒身的顶部一端,所述中部舱筒身的内部设有用以安装运动控制模块的中部舱内部支架。
10.优选地,所述尾部舱包括尾部舱筒身,设于尾部舱筒身前端和后端的尾部舱前端盖、尾部舱后端盖,设于尾部舱筒身左、右两侧的尾部推进器,设于尾部舱筒身内部的第二柔性关节驱动模块以及设于所述尾部舱后端盖上的深度传感器,两个尾部推进器的推进方向互相垂直且各自与尾部舱筒身的筒身轴向方向呈45度夹角,所述尾部舱后端盖上设有用以安装第二水密连接端子的通孔,该第二水密连接端子与线缆连接,所述第二柔性关节驱动模块的一端与所述运动控制模块连接,另一端与所述柔性关节连接,所述深度传感器连接所述单板计算机。
11.优选地,所述柔性关节包括柔性关节前端盖、仿生人工肌肉、柔性关节后端盖和四个柔性关节中部骨架,四个柔性关节中部骨架依次相连,且位于两侧的柔性关节中部骨架分别与柔性关节前端盖和柔性关节后端盖连接,仿生人工肌肉设于各柔性关节中部骨架之间、柔性关节前端盖与柔性关节中部骨架之间以及柔性关节中部骨架与柔性关节后端盖之间。
12.优选地,所述控制柜设有用以对系统各用电组件进行供电的供电管理模块,供电管理模块通过线缆与该无人系统连接。
13.优选地,所述运动控制模块与头部推进器、中部推进器、尾部推进器、照明灯、第一柔性关节驱动模块和第二柔性关节驱动模块单向连接,并与单板计算机双向连接;所述单板计算机与供电管理模块双向连接,所述单板计算机与摄像头双向连接;所述单板计算机分别与水下传感器和深度传感器双向连接;所述单板计算机与所述控制柜双向连接;所述控制柜与所述计算机双向连接。
14.优选地,所述仿生人工肌肉为三十个,以柔性关节前端盖的左右方向为准,柔性关节中部骨架的端部之间、柔性关节中部骨架的端部与柔性关节前端盖之间、柔性关节中部骨架的端部与柔性关节后端盖之间对称安装三层仿生人工肌肉,每层设有五个。
15.本实用新型提供的遥控式多关节深海巡检无人系统,相较于现有技术至少包括如下有益效果:
16.1)相比于传统的遥控式水下无人系统,本实用新型加入了可弯曲的柔性关节,使得三个舱体之间的角度可调,可以具备很高的运动灵活性和通过性。
17.2)相比于传统的水下蛇形无人系统,本实用新型并非采用蛇类的仿生波动式推进方式,而是融合了传统的推进器进行推进,具有较高的运动稳定性,具备了稳定的水下探测能力。
18.3)相比于传统的单体刚性水下无人系统,本实用新型采用了分布式的多组推进器布置,不仅使其具有很高的冗余性,也可以完成较多复杂度较高的动作。
19.4)本实用新型无人系统为遥控式,系统的三个舱体之间通过柔性关节相连,并通过水密线缆进行通信和动力传输,通过柔性关节的设计,可以利用运动控制模块来控制、柔性关节驱动模块、推进器及照明灯,进而控制该无人系统的巡检移动方向,灵活性较高,且在遇到特殊情况时,通过三个柔性关节的配合,然后关闭浅地层剖面仪和激光成像仪遥控
无人系统航行至水面支持船附近后,关闭前视声纳、水声信标以及多普勒速度仪可以实现该无人系统的快速停止和转向,有效的提高该无人系统水下活动时的安全性和可靠性。
20.5)采用了仿生人工肌肉的柔性关节设计,柔性关节弯曲更加平顺且更加节能。
附图说明
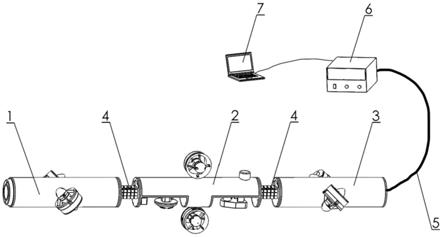
21.图1为实施例中遥控式多关节深海巡检无人系统的结构组成示意图;
22.图2为实施例中某左视角度下的头部舱的外部结构组成示意图;
23.图3为实施例中某右视角度下的头部舱的外部结构组成示意图;
24.图4为实施例中头部舱的内部结构组成示意图;
25.图5为实施例中某左视角度下的中部舱的外部结构组成示意图;
26.图6为实施例中某右视角度下的中部舱的外部结构组成示意图;
27.图7为实施例中中部舱的内部结构组成示意图;
28.图8为实施例中某左视角度下的尾部舱的外部结构组成示意图;
29.图9为实施例中某右视角度下的尾部舱的外部结构组成示意图;
30.图10为实施例中尾部舱的内部结构组成示意图;
31.图11为实施例中柔性关节的结构组成示意图;
32.图12为实施例中遥控式多关节深海巡检无人系统中各组件的连接关系图;
33.图13为实施例中遥控式多关节深海巡检无人系统执行任务的程序流程图;
34.图中标号所示:
35.1、头部舱,1-1、前视声纳,1-2、头部舱前端盖,1-3、照明灯,1-4、摄像头,1-5、头部舱筒身,1-6、头部推进器,1-7、头部舱后端盖,1-8、头部舱内部支架,1-9、单板计算机,1-10、第一柔性关节驱动模块,2、中部舱,2-1、中部舱端盖,2-2、中部舱筒身,2-3、中部推进器,2-4、激光成像仪,2-5、多普勒速度仪,2-6、浅地层剖面仪,2-7、水声信标,2-8、中部舱内部支架,2-9、运动控制模块,3、尾部舱,3-1、尾部舱前端盖,3-2、尾部舱筒身,3-3、尾部推进器,3-4、尾部舱后端盖,3-5、深度传感器,3-6、尾部舱内部支架,3-7、第二柔性关节驱动模块,3-8、电源管理模块,4、柔性关节,4-1、柔性关节前端盖,4-2、柔性关节中部骨架,4-3、仿生人工肌肉,4-4、柔性关节后端盖,5、线缆,6、控制柜,7、计算机。
具体实施方式
36.下面结合附图和具体实施例对本实用新型进行详细说明。显然,所描述的实施例是本实用新型的一部分实施例,而不是全部实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应属于本实用新型保护的范围。
37.实施例
38.如图1所示,本实用新型涉及一种遥控式多关节深海巡检无人系统,包括一个头部舱1、一个中部舱2、一个尾部舱3、两个柔性关节4、一条线缆5、一个控制柜6以及一台计算机7。
39.所述的头部舱1位于无人系统的头部,用于对无人系统前方进行探测并具有一定的运动能力,同时也是无人系统的数据处理与运算中心。所述的中部舱2位于无人系统的中
部,用于搭载各种水下传感器进行水下探测并具有一定的运动能力,也负责无人系统的水下定位,同时也是无人系统的运动控制中心。所述的尾部舱3位于无人系统的尾部,负责整个无人系统的电源管理且具有一定的运动能力。所述的两个柔性关节4分别位于无人系统的中部舱2的两端,用于弯曲不同舱体之间的角度。所述的线缆5位于尾部舱3后端,用于连接水下无人系统并对其供电以及通信控制。所述的控制柜6位于线缆5的另外一端,在水面之上,用于对水下无人系统提供电力以及转接通信与控制信号。所述的计算机7位于水面之上,用于与无人系统进行通信控制。
40.本实用新型的遥控式多关节深海巡检无人系统三个舱体之间可以通过柔性关节互相连接。
41.下面逐一介绍本实用新型的遥控式多关节深海巡检无人系统的各个组成部分。
42.头部舱1的外部结构组成示意图如图2和图3所示,头部舱1的内部结构组成示意图如图4所示,包括一个前视声纳1-1、一个头部舱前端盖1-2、两个照明灯1-3、两个摄像头1-4、一个头部舱筒身1-5、两个头部推进器1-6、一个头部舱后端盖1-7、一个头部舱内部支架1-8、一个单板计算机1-9以及一个第一柔性关节驱动模块1-10。
43.所述的前视声纳1-1位于头部舱1的前方,用于对无人系统前方进行声学成像与探测,可以识别前方障碍物。所述的头部舱前端盖1-2位于头部舱1的前端,用于保护无人系统的头部。所述的两个照明灯1-3和两个摄像头1-4安装于头部舱前端盖1-2上,两个照明灯1-3互相对称,两个摄像头1-4互相对称,两个照明灯1-3的连线与两个摄像头1-4的连线垂直,照明灯1-3用于对无人系统前方进行照明,摄像头1-4用于实时拍摄无人系统前方的视频。所述的头部舱筒身1-5用于保护舱内部件;所述的两个头部推进器1-6位于头部舱1的左、右两侧,推进方向互相垂直且各自与头部舱筒身1-5的筒身的轴向方向呈45度夹角,用于无人系统的运动。所述的头部舱后端盖1-7位于无人系统的尾部,头部舱后端盖1-7的中央位置处及中央位置处的上方分别设有通孔,中部的通孔会安装有水密连接端子,用于给柔性关节4供电,上部的通孔会安装有水密连接端子,用于与其它舱体进行通信与动力传输。所述的头部舱内部支架1-8位于头部舱1的内部,用于支撑头部舱1的内部结构且用于固定头部舱1内部的各个部件。所述的单板计算机1-9安装于头部舱内部支架1-8上,用于对无人系统采集到的数据进行处理与运算,同时也负责与水面计算机7进行通信。所述的第一柔性关节驱动模块1-10安装于头部舱内部支架1-8靠头部舱后端盖1-7的一侧,用于驱动与头部舱1连接的柔性关节4。
44.中部舱2的外部结构组成示意图如图5和图6所示,中部舱2的内部结构组成示意图如图7所示,包括两个中部舱端盖2-1、一个中部舱筒身2-2、两个中部推进器2-3、一个激光成像仪2-4、一个多普勒速度仪2-5、一个浅地层剖面仪2-6、一个水声信标2-7、一个中部舱内部支架2-8以及一个运动控制模块2-9。
45.所述的两个中部舱端盖2-1位于中部舱筒身2-2的两端,用于对中部舱筒身2-2进行密封,两个中部舱端盖2-1的上方分别设有通孔,上部通孔会安装有水密连接端子,用于与其它舱体进行通信与动力传输。所述的中部舱筒身2-2用于保护舱内部件。所述的两个中部推进器2-3位于中部舱2的上、下两侧,推进方向相同且与中部舱筒身2-2方向垂直。所述的激光成像仪2-4安装于中部舱2的底部,用于对水下设施的结构进行激光成像。所述的多普勒速度仪2-5安装于中部舱2的底部,用于测量无人系统相对于海底的速度,同时也可用
于测量底部海水的流速。所述的浅地层剖面仪2-6安装于中部舱2的底部,用于对埋在浅层地下的水下设施结构进行声学成像。所述的水声信标2-7安装于中部舱2的顶部一端,与水面超短基线阵列组成水下定位系统,用于获取水下无人系统的位置。所述的中部舱内部支架2-8位于中部舱2内部,用于支撑中部舱2的内部结构且用于固定中部舱2内部的各个部件。所述的运动控制模块2-9安装于中部舱内部支架2-8上,用于无人系统的姿态解算与运动控制。
46.尾部舱3的外部结构组成示意图如图8和图9所示,尾部舱3的内部结构组成示意图如图10所示,包括一个尾部舱前端盖3-1、一个尾部舱筒身3-2、两个尾部推进器3-3、一个尾部舱后端盖3-4、一个深度传感器3-5、一个尾部舱内部支架3-6、一个第二柔性关节驱动模块3-7以及一个电源管理模块3-8。
47.所述的尾部舱前端盖3-1位于尾部舱3的前部,尾部舱前端盖3-1的中央位置处及中央位置处的上方分别设有通孔,中部的通孔会安装有水密连接端子,用于给柔性关节4供电,上部的通孔会安装有水密连接端子,用于与其它舱体进行通信与动力传输。所述的尾部舱筒身3-2用于保护舱内部件。所述的两个尾部推进器3-3分别位于尾部舱3的左、右两侧,推进方向互相垂直且各自与尾部舱筒身3-2的筒身轴向方向呈45度夹角,用于无人系统的运动。所述的尾部舱后端盖3-4位于尾部舱3的尾部,用于保护无人系统的尾部,尾部舱后端盖3-4上留有通孔,用于通过安装水密连接端子与线缆5相连。所述的深度传感器3-5安装于尾部舱后端盖3-4上,用于获取无人系统所处的水深数据。所述的尾部舱内部支架3-6位于尾部舱3内部,用于支撑尾部舱3的内部结构且用于固定尾部舱3内部的各个部件。所述的第二柔性关节驱动模块3-7安装于尾部舱内部支架3-6靠近尾部舱前端盖3-1的一侧,用于驱动与尾部舱3连接的柔性关节4;所述的电源管理模块3-8安装于尾部舱内部支架3-6靠近尾部舱后端盖3-4的一侧,用于对无人系统内部各个部件进行供电。
48.柔性关节4的结构组成示意图如图11所示,包括一个柔性关节前端盖4-1、四个柔性关节中部骨架4-2、三十个仿生人工肌肉4-3以及一个柔性关节后端盖4-4。
49.所述的柔性关节前端盖4-1位于柔性关节4前端,其上部空缺,用于走线方便舱体之间的通信与动力传输,其中部设有通孔,会安装有水密连接端子用于给仿生人工肌肉4-3供电。所述的四个柔性关节中部骨架4-2依次相连,且头、尾分别与柔性关节前端盖4-1和柔性关节后端盖4-4相连。四个柔性关节中部骨架4-2与柔性关节前端盖4-1、柔性关节后端盖4-4形成五段空间,用于安装仿生人工肌肉。
50.所述的三十个仿生人工肌肉4-3位于四个柔性关节中部骨架4-2之间、柔性关节前端盖4-1与中部骨架4-2之间以及柔性关节中部骨架4-2与柔性关节后端盖4-4之间,左右各十五个(以柔性关节前端盖4-1的左右为准,柔性关节中部骨架4-2的端部之间、端部与柔性关节前端盖4-1之间、端部与柔性关节后端盖4-4之间对称安装三层仿生人工肌肉4-3,每层5个),仿生人工肌肉4-3由介电高弹体薄膜复合材料卷绕而成,用于牵引柔性关节中部骨架4-2以实现柔性关节4的弯曲。
51.本实用新型的遥控式多关节深海巡检无人系统各组件连接关系图如图12所示。在电气连接上,遥控式多关节深海巡检无人系统不配备内置电池,由水上控制柜通过线缆给无人系统供电,电能首先经过供电管理模块,继而由供电管理模块分别给无人系统各个用电组件进行供电。用电组件包括浅地层剖面仪、前视声纳、激光成像仪、水声信标、多普勒测
速仪、深度传感器、单板计算机、两个柔性关节驱动模块、两个摄像头、两个照明灯、运动控制模块以及六个推进器,其中运动控制模块内置有一套惯性测量单元,另外,输送到两个柔性关节驱动模块的电能再由柔性关节驱动模块分配给每一块仿生人工肌肉。在通信连接上,运动控制模块分别与六个推进器、两个照明灯以及两个柔性关节驱动模块单向连接以实现对它们的控制,同时运动控制模块也与单板计算机双向连接,可以进行双向的通信;单板计算机与供电管理模块双向连接,一方面可以接收供电管理模块发来的关于电能分配的信息,另一方面也可以对供电管理模块进行相关配置;单板计算机分别与两个摄像头双向连接,一方面可以接收摄像头传回的图像信息,另一方面也可以对摄像头实现控制;单板计算机分别与浅地层剖面仪、前视声纳、激光成像仪、水声信标、多普勒测速仪以及深度传感器双向连接以实现与它们的通信和控制;单板计算机与水上的控制柜双向连接,用于三节水下无人系统与水上部分的通信和控制;控制柜与计算机双向连接,用于计算机与控制柜的通信与控制,此时控制柜在通信连接上相当于计算机与单板计算机之间的转接部分。
52.本实用新型的遥控式多关节深海巡检无人系统执行任务程序流程图如图13所示。在一次任务中,无人系统开机后首先由所述的单板计算机进行无人系统的自检,判断自身各功能模块是否正常,如果不正常,则由检修人员进行检修,任务结束;如果正常,则通过绞车吊装无人系统下水。无人系统下水后,首先由所述的运动控制模块控制六个推进器来调整稳定无人系统自身的姿态,继而打开所述的前视声纳、水声信标以及多普勒速度仪,然后由操作员遥控无人系统航行至水下需要巡检的区域。到达该区域后,操作员打开所述的浅地层剖面仪和激光成像仪,然后遥控无人系统对水下设施进行检查,同时无人系统返回各个传感器的声学图像以及光学图像。当不需要结束任务时,操作员继续遥控无人系统执行检查任务;当需要结束任务时,操作员首先关闭所述的浅地层剖面仪和激光成像仪,然后遥控无人系统航行至水面支持船附近,然后关闭所述的前视声纳、水声信标以及多普勒速度仪,最后通过绞车吊装无人系统上船,任务结束。
53.本实用新型无人系统为遥控式,系统的三个舱体之间通过柔性关节相连,并通过水密线缆进行通信和动力传输,通过柔性关节的设计,可以利用运动控制模块来控制、柔性关节驱动模块、推进器及照明灯,进而控制该无人系统的巡检移动方向,灵活性较高,且在遇到特殊情况时,通过三个柔性关节的配合,然后关闭浅地层剖面仪和激光成像仪遥控无人系统航行至水面支持船附近后,关闭前视声纳、水声信标以及多普勒速度仪可以实现该无人系统的快速停止和转向,有效的提高该无人系统水下活动时的安全性和可靠性。相比于传统的遥控式水下无人系统,本实用新型由于加入了可弯曲的柔性关节,使得三个舱体之间的角度可调,可以具备很高的运动灵活性和通过性。通过融合分布式的推进器进行推进,具有较高的运动稳定性,具备了稳定的水下探测能力,且不仅使其具有很高的冗余性,也可以完成很多复杂度较高的动作。
54.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的工作人员在本实用新型揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以权利要求的保护范围为准。