1.本发明涉及水下对接装置,具体地说是一种适用于无人潜器的水下对接装置。
背景技术:
2.无人潜器已经成为一种特种海洋装备,能否顺利回收将直接影响无人潜器的续航保障效率,因此需要有效的对接装置为其提供能源补充与信息传输。目前,大量相关领域的国内外研究学者正在研究和开发可以传输信息与能源的水下对接装置;但是,纵观近代对接装置,都存在一定问题,传感器相对单一,导航定位困难,难以通过改变自己的运动姿态进行调整角度,对无人潜器的运动精度要求大,开发成本大。如何研制一款对接容错率大、对接操作方便、能够克服环境问题的对接装置,成为无人潜器的关键问题。
3.现阶段,根据目前国内外具有代表性的研究成果,大多数无人潜器的对接装置将分为三类:以绳索、杆类为对接目标的捕捉式对接方式,以圆锥导向罩和笼箱类为对接目标的包容式对接方式,以水中平台为对接目标的落座式对接方式。其中,以圆锥导向罩和笼箱类为对接目标的包容式对接方式被使用的最为广泛,国内具有代表性的中国科学院沈阳自动化研究所研究的探索者号,浙江大学研究的海豚二号,哈尔滨工程大学研究的海灵号均采用该对接结构。然而小型的对接装置却没有人研发,这导致无人潜器的水下对接技术的研发力量相较薄弱,并缺乏一定的专业型技术人才,严重束缚了水下对接装置的使用寿命以及整体性能的提升。如今,随着无人潜器的水下对接技术的发展,国内外各大水下仪器制造厂正不断追求更具可靠性、经济性及简便性的水下对接装置,这对水下对接装置的体积大小、稳定性、操作性有了更高的要求;传统的大型对接装置不在具有明显的竞争力,原有的产品市场和技术优势受到严重的威胁。因此设计一个体积较小、方便携带、操纵简单、稳定性强的水下对接装置,对无人潜器的发展起着至关重要的作用。
技术实现要素:
4.本发明的目的在于提供一种适用于无人潜器的水下对接装置。该水下对接装置仅需通过前后运动便可实现上下的对接,并且符合水下结构动力学,能够合理地设置精密仪器所需要的环境;并且,本发明具有体积较小、方便携带、操纵简单、稳定性强的特点。
5.本发明的目的是通过以下技术方案来实现的:
6.本发明包括被对接装置、导向罩、拔模圆台对接头及对接装置,其中对接装置包括对接杆、保压密封装置a,所述对接杆为中空结构、内设中空通道a,所述拔模圆台对接头与对接杆的对接端为一体结构或拔摸圆台对接头与对接杆的对接端直连,所述拔模圆台对接头内部设有保压密封装置a,通过所述保压密封装置a将中空通道a与拔模圆台对接头内部之间密封隔开,且所述中空通道a中的水通过保压密封装置a排出,所述拔模圆台对接头上开设有与外界相连通的对接通孔;所述被对接装置包括对接筒、保压密封装置b及电动夹爪,所述对接筒为中空结构、内设中空通道b,所述导向罩与对接筒的对接端相连,在所述导向罩后方的对接筒内设有电动夹爪,所述中空通道b内部设有保压密封装置b,通过所述保
压密封装置b将中空通道b分隔成密封的对接区域及保压区域,且所述保压区域中的水通过保压密封装置b排至对接区域;所述拔模圆台对接头在对接后位于对接区域内,所述电动夹爪在对接后密封夹紧对接杆,所述电动夹爪与保压密封装置b之间的对接区域中的水通过对接筒上开设的带电磁阀c的排水孔排出,所述中空通道a与中空通道b之间通过保压密封装置a、对接通孔及保压密封装置b实现连通。
7.其中:所述保压密封装置a包括保压延长管a、保压密封端盖a及密封环a,所述保压延长管a的一端设有密封环a,另一端安装有可开关的保压密封端盖a,所述密封环a与拔模圆台对接头的内壁密封抵接或与所述中空通道a的内壁密封抵接;所述密封环a上开设有连通密封环a两侧的排水管道a,所述排水管道a中安装有控制排水管道a开关的电磁阀a。
8.所述保压密封装置b包括保压延长管b、保压密封端盖b及密封环b,所述保压延长管b的一端设有密封环b,另一端安装有可开关的保压密封端盖b,所述密封环b与中空通道b的内壁密封抵接;所述密封环b上开设有连通密封环b两侧的排水管道b,所述排水管道b中安装有控制排水管道b开关的电磁阀b。
9.所述保压密封端盖b在对接后位于所述对接通孔的上方。
10.所述对接杆为倒置的“l”形,其内部的所述中空通道a也为倒置的“l”形,所述“l”形横边的端部为对接杆的对接端。
11.所述对接筒为“l”形,其内部的所述中空通道b也为“l”形,所述“l”形横边的端部为对接端,且与所述导向罩连接。
12.所述导向罩为锥台状,直径小的一端与所述对接筒相连;所述导向罩包括多个同心设置、直径逐渐变大的圆环,各所述圆环之间通过多根斜杆连接;所述导向罩外侧端面的各象限点上均安装有用于照明导向的灯源。
13.所述导向罩后侧的中空通道b内壁开设有凹槽,所述电动夹爪容置于凹槽内,所述电动夹爪的夹爪轴固定在凹槽内,所述电动夹爪绕夹爪轴转动,实现对所述拔模圆台对接头后侧对接杆的密封夹紧。
14.所述拔模圆台对接头为锥台状,所述对接通孔开设于拔模圆台对接头的顶部。
15.所述对接杆及对接筒的尾端直径大于其他部位的直径。
16.本发明的优点与积极效果为:
17.1.本发明的水下对接装置为前头移动式对接,解决了水下设备移动性差、方向性差的笨重问题,符合了水下结构控制学的基本要求;同时,本发明可以使水下无人潜器有效的设置精密仪器的使用环境,并保证对接中的稳定性,具有方便进行水下无人潜器与其它装置的信息、能源传输的优势。
18.2.本发明在水下无人潜器的对接过程中,具有快捷高效、稳定性强、适用性广的优点。
19.3.本发明的水下对接装置设有圆台状的对接头,可以有效减少对接过程的阻力,符合结构设计学的基本要求。
20.4.本发明的导向罩呈锥形,可以完美的进行轨迹引导,并且导向罩设置为蜘蛛网状,符合了水下结构动力学的本要求。
附图说明
21.图1为本发明的整体结构示意图;
22.图2为本发明的结构俯视图;
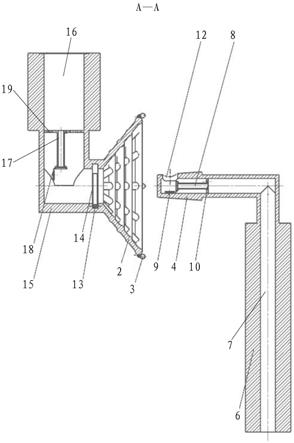
23.图3为图2中的a—a剖视图;
24.图4为本发明拔模圆台对接头处的局部放大剖视图;
25.图5为本发明对接筒部分的局部放大剖视图;
26.图6为本发明对接装置与被对接装置完成对接后的结构示意图;
27.图7为图6的结构左视图;
28.图8为本发明对接装置与被对接装置在对接处的局部放大剖视图;
29.图9为本发明对接装置与被对接装置完成对接后的结构剖视图;
30.图10为本发明的工作状态示意图;
31.其中:1为被对接装置,2为导向罩,3为灯源,4为拔模圆台对接头,5为对接装置,6为对接杆,7为中空通道a,8为保压延长管a,9为保压密封端盖a,10为密封环a,11为排水管道a,12为对接通孔,13为夹爪轴,14为电动夹爪,15为对接筒,16为中空通道b,17为保压延长管b,18为保压密封端盖b,19为密封环b,20为排水管道b,21为圆环,22为斜杆,23为无人潜器,24为对接平台。
具体实施方式
32.下面结合附图对本发明作进一步详述。
33.如图1~10所示,本发明包括被对接装置1、导向罩2、拔模圆台对接头4及对接装置5,其中对接装置5包括对接杆6、保压密封装置a,对接杆6为中空结构、内设中空通道a7,拔模圆台对接头4与对接杆6的对接端为一体结构或拔摸圆台对接头4与对接杆6的对接端直连,拔模圆台对接头4内部设有保压密封装置a,通过保压密封装置a将中空通道a7与拔模圆台对接头4内部之间密封隔开,且中空通道a7中的水通过保压密封装置a排出;拔模圆台对接头4上开设有与外界环境相连通的对接通孔12,可以作为对接装置1与被对接装置5对接后的信息管理传输通道;被对接装置1包括对接筒15、保压密封装置b及电动夹爪14,对接筒15为中空结构、内设中空通道b16,导向罩2与对接筒15的对接端相连,导向罩2用于对拔模圆台对接头4进行引导对齐,在导向罩2后方的对接筒15内设有电动夹爪14,中空通道b16内部设有保压密封装置b,通过保压密封装置b将中空通道b16分隔成密封的对接区域及保压区域,且保压区域中的水通过保压密封装置b排至对接区域;保压密封装置a及保压密封装置b用于隔离仪器环境与外界环境,可以完全阻绝外界环境的影响;拔模圆台对接头4在对接后位于对接区域内,电动夹爪14在对接后密封夹紧对接杆6,电动夹爪14与保压密封装置b之间的对接区域中的水通过对接筒15上开设的带电磁阀c的排水孔排出,中空通道a7与中空通道b16之间通过保压密封装置a、对接通孔12及保压密封装置b实现连通。
34.本实施例的对接杆6为倒置的“l”形,其内部的中空通道a7也为倒置的“l”形,“l”形横边的端部为对接杆6的对接端。本实施例的拔模圆台对接头4为中空的锥台状,对接通孔12开设于拔模圆台对接头4的顶部,拔模圆台对接头4将直接伸入对接筒15进行对接。本实施例的拔模圆台对接头4与对接杆6一体成形,拔模圆台对接头4尾端直径大于对接杆6的“l”形横边直径。
35.本实施例的保压密封装置a包括保压延长管a8、保压密封端盖a9及密封环a10,保压延长管a8位于对接杆6的“l”形横边内部,且同轴设置;保压延长管a8的一端设有密封环a10,保压延长管a8的另一端安装有位于对接通孔12下方、可开关的保压密封端盖a9,保压密封端盖a9可通过自带的电动气缸驱动实现90
°
翻盖,保压密封端盖a9是整个对接杆6与外界连通的开关,密封环a10与拔模圆台对接头4的内壁密封抵接或与中空通道a7的内壁密封抵接;密封环a10上开设有连通密封环a10两侧的排水管道a11,调节环境的介质与压力,排水管道a11中安装有控制排水管道a11开关的电磁阀a。本实施例的密封环a10用于隔离外界复杂的水下环境和布置精准对接的条件。
36.本实施例的对接筒15为“l”形,其内部的中空通道b16也为“l”形,“l”形横边的端部为对接端,且与导向罩2连接。本实施例的导向罩2为蜘蛛网型锥形导向罩,即导向罩2呈锥台状,直径小的一端与对接筒15的对接端相连;导向罩2包括多个(本实施例为四个)同心设置、直径逐渐变大的圆环,各圆环之间通过多根斜杆连接;导向罩2外侧端面的各象限点上均安装有用于照明导向的灯源3,灯源3可为灯泡,分别分布在蜘蛛网型锥形导向罩外侧端面的四个象限点上,用于照明导向。
37.本实施例的保压密封装置b包括保压延长管b17、保压密封端盖b18及密封环b19,保压延长管b17位于对接筒15的“l”形竖边内部,且同轴设置;保压延长管b17的一端设有密封环b19,保压延长管b17的另一端安装有可开关的保压密封端盖b18,保压密封端盖b18可通过自带的电动气缸驱动实现90
°
翻盖,保压密封端盖b18是整个对接筒15与外界连通的开关,保压密封端盖b18在对接后位于对接通孔12的上方,密封环b19与中空通道b16的内壁密封抵接;密封环b19上开设有连通密封环b19两侧的排水管道b20,用于调节环境的介质与压力,排水管道b20中安装有控制排水管道b20开关的电磁阀b。本实施例的密封环b19用于隔离外界复杂的水下环境和布置精准对接的条件。
38.本实施例的导向罩2后侧的中空通道b16内壁开设有凹槽,电动夹爪14容置于凹槽内,电动夹爪14的夹爪轴13固定在凹槽内,电动夹爪14绕夹爪轴13转动,实现对拔模圆台对接头4后侧对接杆6的密封夹紧。
39.本实施例对接筒15的“l”形横边底部开设有排水孔,排水孔中安装有电磁阀c。本实施例在对接筒15的“l”形竖边远离导向罩2的一侧内壁上安装有接触感应继电器。本实施例的电磁阀a、电磁阀b、电磁阀c、电动夹爪14、接触感应继电器和保压密封端盖上的电动气缸均与控制单元连接,水下控制单元与水上无线控制终端无线通信,水下控制单元根据水上无线控制终端发送的指令,控制电磁阀a、电磁阀b、电磁阀c、电动夹爪14、接触感应继电器和电动气缸动作。
40.本实施例对接杆6及对接筒15的尾端直径大于其他部位的直径,以增加对接杆6、对接筒15的强度,避免因长度过长而折断。
41.本实施例的保压密封端盖a9、保压密封端盖b18、电动夹爪14均为现有技术,水下控制单元控制电磁阀a、电磁阀b、电磁阀c的开关为现有技术,水下控制单元控制保压密封端盖a9、保压密封端盖b18的开关以及控制电动夹爪14的动作均为现有技术,在此不再赘述。
42.本发明的工作原理为:
43.如图10所示,为了使对接结构设计合理,本实施例通过前后两个水下对接装置完
成对接。因单纯的上浮和下沉需要进行压水舱的调节,但由于压水舱调节技术尚未成熟,调节精度不够,调节方式复杂。因此,本发明通过前后结构完成对接。
44.对接前,水下控制单元分别控制电磁阀a及电磁阀b打开,将中空通道a7及中人通道b16内部环境的海水/湖水排空,直至排至真空或中空通道a7及中空通道b16内压强与大气压相同;设置好相关环境后,电磁阀a及电磁阀b在水下控制单元的控制下关闭。保持对接装置5在被对接装置1的下方,经过对接装置5的前进,开始两个水下对接装置的对接。由于需要径直前进,将两个水下对接装置中的对接装置5设计为不同长度,方便将其错开,保证可以顺利对接。由于其中第一个水下对接装置的导向罩2较大、拔模圆台对接头4所在的对接杆6的“l”形横边较长,第一个水下对接装置的对接将快于第二个水下对接装置。因此,第一个水下对接装置可以进行大范围的导向定位,经过第一个水下对接装置中导向罩2的成功导向后,再由两个水下对接装置共同导向对接。
45.无人潜器将仅靠简单的推进运动使对接装置5与导向罩2进行对接,将导向罩2设计成锥形,可更方便的对接,锥形的导向罩2可以对拔模圆台对接头4进行导航定位,使拔模圆台对接头4仅靠一个方向的速度,就可以完成各个方向的定位,顺利到达锥形的导向罩2后侧的对接筒15中;同时,将锥形的导向罩2设计成蜘蛛网状可以大大减小无人潜器运动的阻力。首先,拔模圆台对接头4会经过导向罩2进行导向定位,之后拔模圆台对接头4将被导向罩2导入对接筒15中,待拔模圆台对接头4碰到对接筒15内壁上设置的接触感应继电器时,水下控制单元控制电动夹手14将拔模圆台对接头4后侧的对接杆6夹紧,使对接杆6与对接筒15固定,从而使无人潜器23与对接平台24固定。密封环b19与电动夹爪14之间的区域为密封的对接区域,水下控制单元控制电磁阀c打开,排空对接区域中的水,电磁阀c关闭,使对接区域形成密封空间。然后,水下控制单元分别控制保压密封端盖a9自带的电动气缸动作及保压密封端盖b18自带的电动气缸动作,使保压密封端盖a9及保压密封端盖b18分别翻转90
°
,中空通道a7与中空通道b16之间通过保压延长管a8、保压密封端盖a9、对接通孔12、保压密封端盖b18、保压延长管b17相通,无人潜器23和对接平台24将允许信息传输的相关线路连通。
46.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。