1.本实用新型属于清洁设备技术领域,具体是一种吸尘对位结构。
背景技术:
2.扫地机器人和吸尘器等清洁设备越来越普遍,为了清洁更加方便,因此设计了基站对扫地机器人或吸尘器里面的灰尘进行集中处理,目前与基站配套使用的扫地机器人均设有对接口,一般情况下在对接口处会设有遮挡,但是遮挡是固定的,在扫地机器人回到基站后,需要手动将遮挡打开才能使扫地机器人与基站对接,十分不便,影响用户的体验。
技术实现要素:
3.本实用新型的目的在于提供一种吸尘对位结构,以解决上述背景技术中提出的问题。
4.为实现上述目的,本实用新型提供如下技术方案:
5.一种吸尘对位结构,包括基站和扫地机器人,所述基站内设有集尘装置,所述集尘装置通过管道连接对接机构,所述扫地机器人包括集尘盒,所述集尘盒上设有用于排空灰尘的出口,所述出口外侧设有挡板,所述挡板一端与集尘盒铰接,在挡板与集尘盒铰接处设有扭簧。
6.进一步的技术方案,所述集尘盒还包括出尘通道,所述出尘通道一端与出口对接,所述出尘通道另一端可与对接机构连接,所述出口面积小于出尘通道截面面积。
7.进一步的技术方案,所述对接机构包括折弯管,所述折弯管一端与管道连接,所述折弯管另一端连接有软管,所述软管向外一端设有密封嘴。
8.进一步的技术方案,所述软管上设有开闭机构。
9.进一步的技术方案,所述开闭机构包括夹条一和夹条二,所述夹条一和夹条二分别位于软管相对一侧,并且两者一端相互铰接,形成可夹紧软管的通道门夹,所述通道门夹一侧设有驱动装置,所述驱动装置上安装有齿轮,所述齿轮与设置在夹条一上的棘条啮合。
10.本实用新型的有益效果:
11.本实用新型提供一种吸尘对位结构,在扭簧和挡板的配合下,使挡板时刻抵住出口,将出口封闭,当需要吸尘时,吸力大于扭簧的弹力,使挡板一端往吸力方向运动,出口被打开,同时通过吸力将位于集尘盒内的灰尘从出口出被吸出,完成吸出后,吸出装置关闭,通过扭簧的弹力再次将挡板压回出口外侧,将出口关闭,实现全程无需人员操作,提高智能化程度,优化人们的体验。
附图说明
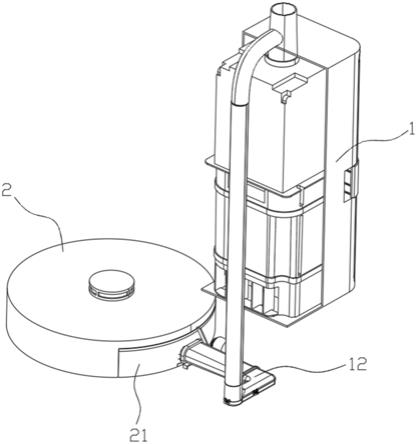
12.图1:本实用新型的整体结构图。
13.图2:本实用新型的集尘盒和对接机构结构图。
14.图3:本实用新型的集尘盒和对接机构剖面图。
具体实施方式
15.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,
16.请参照图1-3,
17.一种吸尘对位结构,包括基站1和扫地机器人2,所述基站1内设有集尘装置11,所述集尘装置11通过管道连接对接机构12,所述扫地机器人2包括集尘盒21,所述集尘盒21上设有用于排空灰尘的出口22,所述出口22外侧设有挡板23,所述挡板23一端与集尘盒21铰接,在挡板23与集尘盒21铰接处设有扭簧24。
18.使用时,扫地机器人2在规定的区域内进行清扫,清扫完成后扫地机器人2回到基站1中,此时出口22与对接结构进对接,由于在出口22外侧设有挡板23,并且在扭簧24的作用下,使挡板23时刻抵住出口22,将出口22封闭,此时,基站1中的吸尘装置启动,使管道及对接机构12中形成一定吸力,当吸力大于扭簧24的弹力时,挡板23一端往吸力方向运动,出口22被打开,同时通过吸力将位于集尘盒21内的灰尘从出口22出被吸出,完成吸出后,吸出装置关闭,通过扭簧24的弹力再次将挡板23压回出口22外侧,将出口22关闭;
19.通过该对位机构,实现全程无需人员操作,提高智能化程度,优化人们的体验。
20.本实用新型实施例中,在出口22处设置有出尘通道25,当需要吸尘对接时,对接机构12与出尘通道25远离出口22的一端对接,提供了缓冲空间,另外由于出口22面积小于出尘通道25截面面积,使挡板23被吸起时,通过出尘通道25提供足够的活动空间,使挡板23能够完全打开,更利于将灰尘从集尘盒21中吸出。
21.本实用新型实施例中,对接机构12包括折弯管121、软管122,及密封嘴123,通过折弯管121的设置,可以使对接口能够放置到合适的位置,而软管122的设置,通过开闭机构13控制软管122的开合,避免有蟑螂等小动物从对接口进入基站1中,而造成损坏,另外,在吸尘时,密封嘴123与出尘通道25或出口22对接,可以避免吸力外泄。
22.本实用新型实施例中,开闭机构13包括夹条一131、夹条二132,以及驱动装置133;其中夹条一131和夹条二132一端铰接形成可夹紧软管122的通道门夹,使用时,夹条二132是固定不动的,通过驱动装置133上的齿轮134与夹条一131上的棘条(图未示)配合下,使夹条一131能够以铰接点为中心摆动,能够与夹条二132贴合,将软管122压住,也就是说,将对接机构12关闭。
23.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
24.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施。
技术特征:
1.一种吸尘对位结构,包括基站(1)和扫地机器人(2),所述基站(1)内设有集尘装置(11),其特征在于:所述集尘装置(11)通过管道连接对接机构(12),所述扫地机器人(2)包括集尘盒(21),所述集尘盒(21)上设有用于排空灰尘的出口(22),所述出口(22)外侧设有挡板(23),所述挡板(23)一端与集尘盒(21)铰接,在挡板(23)与集尘盒(21)铰接处设有扭簧(24)。2.根据权利要求1所述的一种吸尘对位结构,其特征在于:所述集尘盒(21)还包括出尘通道(25),所述出尘通道(25)一端与出口(22)对接,所述出尘通道(25)另一端可与对接机构(12)连接,所述出口(22)面积小于出尘通道(25)截面面积。3.根据权利要求2所述的一种吸尘对位结构,其特征在于:所述对接机构(12)包括折弯管(121),所述折弯管(121)一端与管道连接,所述折弯管(121)另一端连接有软管(122),所述软管(122)向外一端设有密封嘴(123)。4.根据权利要求3所述的一种吸尘对位结构,其特征在于:所述软管(122)上设有开闭机构(13)。5.根据权利要求4所述的一种吸尘对位结构,其特征在于:所述开闭机构(13)包括夹条一(131)和夹条二(132),所述夹条一(131)和夹条二(132)分别位于软管(122)相对一侧,并且两者一端相互铰接,形成可夹紧软管(122)的通道门夹,所述通道门夹一侧设有驱动装置(133),所述驱动装置(133)上安装有齿轮(134),所述齿轮(134)与设置在夹条一(131)上的棘条啮合。
技术总结
本实用新型公开了一种吸尘对位结构,包括基站和扫地机器人,所述基站内设有集尘装置,所述集尘装置通过管道连接对接机构,所述扫地机器人包括集尘盒,所述集尘盒上设有用于排空灰尘的出口,所述出口外侧设有挡板,所述挡板一端与集尘盒铰接,在挡板与集尘盒铰接处设有扭簧,实现全程无需人员操作,提高智能化程度,优化人们的体验。优化人们的体验。优化人们的体验。
技术研发人员:焦加加 薛烈潮
受保护的技术使用者:广东旺家智能机器人有限公司
技术研发日:2021.09.10
技术公布日:2022/1/14