1.本发明涉及船舶领域,具体涉及一种艏艉双向航行船舶的驾驶室结构。
背景技术:
2.现有船舶的驾驶室通常都只在朝船首或者最多到两侧的方向上设置控制台与窗结构,以便船员目视观测船首以及船舷两侧的情况。部分船舶由于船宽较大,还在驾驶室两侧设置露天的桥翼平台,便于船员行走至室外直接观察船舶舷侧的情况。
3.但是,某些船舶在航行过程中有意识地需要其作艏艉双向航行,比如航行在极地的破冰船、自主破冰型的货船,以及一些对操纵性要求较高的船舶。对该类型船舶,采用现有常规型的驾驶室结构,则只能观测艏部的情况,而当船舶艉向航行时,船员就无法在驾驶室内直接观测船尾,对航行安全性极其不利。因此,对这种能够艏艉双向航行的船舶,其驾驶室结构需有别于现有传统船舶的驾驶室。
技术实现要素:
4.本发明的目的是提供一种艏艉双向航行船舶的驾驶室结构,以解决现有技术中的上述不足之处。
5.为了实现上述目的,本发明提供如下技术方案:
6.一种艏艉双向航行船舶的驾驶室结构,包括艏向驾驶室本体和艉向驾驶室本体,所述艏向驾驶室本体和艉向驾驶室本体设于船舶上层建筑的最顶层,所述艏向驾驶室本体的一侧设有连通过道,所述连通过道的一端和艉向驾驶室本体相连,所述艏向驾驶室本体、艉向驾驶室本体与连通过道在连通位置设有电吸门,所述艏向驾驶室本体的内部均设有船舶控制台船舶主控制台,所述的内部设有船舶副控制台,所述船舶主控制台和船舶副控制台的顶部一侧设有控制仪表台,所述船舶主控制台的顶部一侧设有主控制电脑,所述船舶主控制台的顶部一侧分别设有副电脑控制介入模块和主电脑控制介入模块,所述船舶副控制台的顶部一侧设有副控制电脑,所述船舶副控制台的顶部一侧分别设有主电脑控制介入模块和请求控制介入模块。
7.优选的,所述艏向驾驶室本体与桥翼为连体式结构,且均呈封闭式结构,以避免如雨雪天气下船员露天观测不便的情况。所述艏向驾驶室本体和艉向驾驶室本体的一侧外壁设有安全门。
8.优选的,所述艏向驾驶室本体和艉向驾驶室本体包括有驾驶室外墙,所述驾驶室外墙的外壁开有等距离分布的安装口,所述安装口的内壁固定设有双层观察窗,所述双层观察窗的两侧外壁固定设有防腐蚀密封胶条。
9.优选的,所述电吸门包括有磁吸门和电磁块,所述磁吸门为单向开闭型式,其顶部一侧固定设有铁镍合金板,所述电吸门的底部一侧固定设有电磁块,电吸门的门框前后两侧都固定设有电磁开关,所述电磁块通过导线和电磁开关电性连接,所述电磁开关连接有电源线。
10.优选的,所述电吸门、安全门与连通过道的壁面都敷有隔声材料,以满足船舶舱室噪声的要求。
11.优选的,所述连通过道的长度可随艏向和艉向驾驶室的布置位置作调整,其顶部与侧面每隔一档船舶肋骨间距设置有箱型梁结构,以确保连通过道作为船舶钢结构的强度和稳定性。
12.优选的,所述船舶主控制台和船舶副控制台通过监控设备互相了解操作状况,所述船舶主控制台和船舶副控制台内设有无线电通讯系统,以便于在无干扰仪器正常的情况下相互了解航行状态。
13.优选的,通过船舶主控制台顶部设有的副电脑控制介入模块能够将船体的实际操作系统移交于副控制电脑,通过船舶主控制台顶部设有的主电脑控制介入模块能够主动切换船体的实际操作系统,将船体的实际操作权移交于主控制电脑,通过船舶副控制台顶部设有的请求控制介入模块能够向主控制电脑请求操作船体的控制系统,在船舶主控制台未响应的情况下3min后自动切换至主控制电脑操作船体的控制系统,通过船舶副控制台顶部设有的请求退出控制介入模块能够请求主控制电脑移交船体的控制系统。
14.优选的,两个所述船舶控制台均可以独立操作和控制船舶的航行状态,包括航速、航向等,且两个船舶控制台的操作系统互不干扰,在正常工作状态下只允许其中的一个船舶控制台能够操作和控制船舶的航行。
15.在上述技术方案中,本发明提供的技术效果和优点:
16.1.本发明的驾驶室结构通过艏向驾驶室本体和艉向驾驶室本体构成艏艉双向航行船舶的驾驶室结构,满足船舶艏艉双向航行的操作需求,设置相互独立的两个控制台,简化船舶的艏艉双向航行操作控制过程,设置的连通过道也可以方便船员在船舶艏艉交替航行时的通信与走动。
17.2.本发明的驾驶室结构在船舶主控制台控制船体移动时船舶副控制台无法操作船体,这样能够避免两个操作系统冲突。通过船舶主控制台顶部设有的副电脑控制介入模块能够将船体的实际操作系统移交于副控制电脑,能够快捷方便的切换船舶主控制台和船舶副控制台的控制权,以便于更加简单的操作船体。
附图说明
18.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
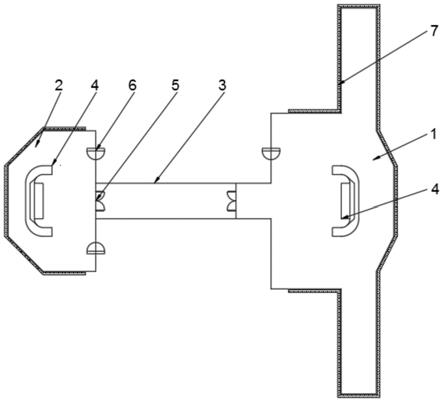
19.图1为本发明一种艏艉双向航行船舶的驾驶室结构的主体结构示意图。
20.图2为本发明一种艏艉双向航行船舶的驾驶室结构的驾驶室外墙结构示意图。
21.图3为本发明一种艏艉双向航行船舶的驾驶室结构中电吸门结构示意图。
22.图4为本发明船舶一种艏艉双向航行船舶的驾驶室结构中主控制台结构示意图;
23.图5为本发明一种艏艉双向航行船舶的驾驶室结构中船舶副控制台结构示意图。
24.附图标记说明:
25.1艏向驾驶室本体、2艉向驾驶室本体、3连通过道、4-1船舶主控制台、4-2船舶副控制台、5电吸门、6安全门、7驾驶室外墙、8双层观察窗、9防腐蚀密封胶条、10磁吸门、11铁镍
合金板、12电磁块、13电磁开关、14控制仪表台、15主控制电脑、16副控制电脑、17副电脑控制介入模块、18主电脑控制介入模块、19请求控制介入模块、20请求退出控制介入模块。
具体实施方式
26.为了使本领域的技术人员更好地理解本发明的技术方案,下面将结合附图对本发明作进一步的详细介绍。
27.参照说明书附图1-5,本发明涉及到一种艏艉双向航行船舶的驾驶室结构,包括艏向驾驶室本体1和艉向驾驶室本体2,艏向驾驶室本体1和艉向驾驶室本体2设于船舶上层建筑的最顶层,在艏向驾驶室本体1和艉向驾驶室本体2中分别设计有船舶控制台4,为了区分,艏向驾驶室本体1的内部均设有船舶主控制台4-1,艉向驾驶室本体的内部设有船舶副控制台4-2。
28.艏向驾驶室本体1的一侧设有连通过道3,连通过道3的一端和艉向驾驶室本体2相连。艏向驾驶室本体1、艉向驾驶室本体2与连通过道3在连通位置设有电吸门5,艏向驾驶室本体1与桥翼为连体式结构,且均呈封闭式结构,以避免如雨雪天气下船员露天观测不便的情况。艏向驾驶室本体1和艉向驾驶室本体2的一侧外壁设有安全门6。艏向驾驶室本体1和艉向驾驶室本体2包括有驾驶室外墙7,驾驶室外墙7的外壁开有等距离分布的安装口,安装口的内壁固定设有双层观察窗8,双层观察窗8的两侧外壁固定设有防腐蚀密封胶条9。
29.上述的电吸门5包括有磁吸门10和电磁块12,磁吸门10为单向开闭型式,其顶部一侧固定设有铁镍合金板11,电吸门5的底部一侧固定设有电磁块12,电吸门5的门框前后两侧都固定设有电磁开关13,电磁块12通过导线和电磁开关13电性连接,电磁开关13连接有电源线,电吸门5、安全门6与连通过道3的壁面都敷有隔声材料,以满足船舶舱室噪声的要求。
30.上述连通过道3的长度可随艏向和艉向驾驶室的布置位置作调整,其顶部与侧面每隔一档船舶肋骨间距设置有箱型梁结构,以确保连通过道作为船舶钢结构的强度和稳定性。
31.船舶控制台4均可以独立操作和控制船舶的航行状态,包括航速、航向等,且两个船舶控制台4的操作系统互不干扰,在正常工作状态下只允许其中的一个船舶控制台4能够操作和控制船舶的航行。
32.上述船舶主控制台4-1和船舶副控制台4-2的顶部一侧设有控制仪表台14,船舶主控制台4-1的顶部一侧设有主控制电脑15,船舶主控制台4-1的顶部一侧分别设有副电脑控制介入模块17和主电脑控制介入模块18。船舶副控制台4-2的顶部一侧设有副控制电脑16,船舶副控制台4-2的顶部一侧分别设有主电脑控制介入模块18和请求控制介入模块19。船舶主控制台4-1和船舶副控制台4-2通过监控设备互相了解操作状况,船舶主控制台4-1和船舶副控制台4-2内设有无线电通讯系统,以便于在无干扰仪器正常的情况下相互了解航行状态。
33.通过船舶主控制台4-1顶部设有的副电脑控制介入模块17能够将船体的实际操作系统移交于副控制电脑16,通过船舶主控制台4-1顶部设有的主电脑控制介入模块18能够主动切换船体的实际操作系统,将船体的实际操作权移交于主控制电脑15,通过船舶副控制台4-2顶部设有的请求控制介入模块19能够向主控制电脑15请求操作船体的控制系统,
在船舶主控制台4-1未响应的情况下3min后自动切换至主控制电脑15操作船体的控制系统,通过船舶副控制台4-2顶部设有的请求退出控制介入模块20能够请求主控制电脑15移交船体的控制系统。
34.除了便于观察以外,本发明的艏艉双向航行船舶的驾驶室结构满足船舶艏艉双向航行的操作需求,通过设置相互独立的两个控制台,简化船舶的艏艉双向航行操作控制过程。同时,设置的连通过道也可以方便船员在船舶艏艉交替航行时的通信与走动。
35.在实际航向过程中,在艏向驾驶室本体1和艉向驾驶室本体2内均可以独立操作船舶控制台4来控制船舶的航行状态,包括航速、航向等,且两个船舶控制台4的操作系统互不干扰,但是在正常工作状态下只允许其中的一个船舶控制台4能够操作和控制船舶的航行。
36.从而当艏向航行时,船员只需待在艏向驾驶室本体1内进行操作,而当艉向航行时,船员只需待在艉向驾驶室本体2内进行操作,并且避免因艏向驾驶室本体1与艉向驾驶室本体2内都有船员的情况下操作信号的相互干扰,通过船舶主控制台4-1顶部设有的副电脑控制介入模块17能够将船体的实际操作系统移交于副控制电脑16。通过船舶主控制台4-1顶部设有的主电脑控制介入模块18能够主动切换船体的实际操作系统,将船体的实际操作权移交于主控制电脑15,通过船舶副控制台4-2顶部设有的请求控制介入模块19能够向主控制电脑15请求操作船体的控制系统,在船舶主控制台4-1未响应的情况下3min后自动切换至主控制电脑15操作船体的控制系统,通过船舶副控制台4-2顶部设有的请求退出控制介入模块20能够请求主控制电脑15移交船体的控制系统,能够快捷方便的切换船舶主控制台4-1和船舶副控制台的控制权,以便于更加简单的操作船体。
37.以上只通过说明的方式描述了本发明的某些示范性实施例,毋庸置疑,对于本领域的普通技术人员,在不偏离本发明的精神和范围的情况下,可以用各种不同的方式对所描述的实施例进行修正。因此,上述附图和描述在本质上是说明性的,不应理解为对本发明权利要求保护范围的限制。