1.本实用新型涉及水下清洁设备技术领域,更具体的说是涉及一种水下机器人结构。
背景技术:
2.水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人。水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具。
3.但是,现有的水下机器人不仅结构复杂,而且运动受限,不能全方位携带作业工具运动,影响作业效果。
4.因此,提供一种结构简单且灵活运动的水下机器人结构是本领域技术人员亟需解决的问题。
技术实现要素:
5.有鉴于此,本实用新型提供了一种水下机器人结构,结构简单,动作灵活,能够携带作业工具全方位运动。
6.为了实现上述目的,本实用新型采用如下技术方案:
7.一种水下机器人结构,包括:
8.主体框架,所述主体框架内部上方形成浮力槽;
9.浮力块,所述浮力块安装在所述浮力槽内;
10.过滤网,所述过滤网围设在所述主体框架的外围;
11.多个垂直推进器,多个所述垂直推进器分别安装在所述主体框架内部上方的四个角端且均包裹在所述过滤网内,并且所述垂直推进器贯穿所述浮力块;
12.多个水平推进器,多个所述水平推进器分别安装在所述主体框架内部下方的四个角端且均包裹在所述过滤网内;
13.电源控制舱和驱动舱,所述电源控制舱及与其电性连接的所述驱动舱均固定在所述主体框架下部且均包裹在所述过滤网内;多个所述垂直推进器和多个所述水平推进器均与所述驱动舱电性连接。
14.通过采取以上技术方案,本实用新型产生的有益技术效果是:
15.1)本实用新型结构简单,通过浮力块为主体框架提供浮力,垂直推进器为主体框架的上浮下潜及俯仰横滚运动提供动力,水平推进器为主体框架的前进后退和左转右转及左移右移提供动力,动作灵活,能够携带作业工具全方位运动;
16.2)过滤网对水下环境中水草及鱼绳等杂物进行过滤,避免垂直推进器和水平推进器缠绕上杂物导致停转故障。
17.进一步的,还包括保护板架,所述保护板架固定在所述主体框架上部遮盖住所述浮力块,并且与所述过滤网外围紧贴固定;所述垂直推进器依次贯穿所述浮力块和所述保护板架。
18.采用上述进一步的技术方案产生的有益效果为,能够对主体框架内部的部件进行防撞及防刮保护。
19.进一步的,还包括多个带照明灯的摄像头、两个短基线定位信标和姿态导航仪,多个所述带照明灯的摄像头分别安装在所述浮力块的外围并且贯穿所述浮力块,多个所述带照明灯的摄像头均与所述电源控制舱电性连接;两个所述短基线定位信标分别固定在所述主体框架内部上方两侧且贯穿所述浮力块;所述姿态导航仪安装在所述主体框架上且位于所述浮力块的下方,所述姿态导航仪与所述电源控制舱电性连接。
20.采用上述进一步的技术方案产生的有益效果为,能够获取水下信息,利于水下运动载体的运动及控制,提高清刷效果,其中多个带照明灯的摄像头可以全方位观察到水下周边环境状态,为运动提供参考信息;姿态导航仪能够获取航向、姿态及深度等导航信息。
21.进一步的,还包括布放回收头,所述布放回收头铰接在所述主体框架中央,并且贯穿所述浮力块。
22.采用上述进一步的技术方案产生的有益效果为,布放回收头能够前后摆动,顺应水流方向,减小在水中的运动阻力。
23.进一步的,所述垂直推进器与所述主体框架竖直方向呈5
‑
20
°
夹角。
24.采用上述进一步的技术方案产生的有益效果为,能够提高推动效率。
25.进一步的,所述主体框架为不锈钢或钛合金材质;所述保护板架为pe或聚丙烯材质。
26.采用上述进一步的技术方案产生的有益效果为,不锈钢或钛合金材质的主体框架防腐;pe或聚丙烯材质的保护板架耐磨抗撞。
附图说明
27.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
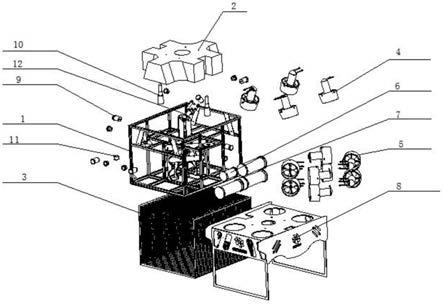
28.图1附图为本实用新型提供的一种水下机器人结构的爆炸图;
29.图2附图为本实用新型提供的一种水下机器人结构的主视图;
30.图3附图为本实用新型提供的一种水下机器人结构的俯视图。
具体实施方式
31.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
32.如图1
‑
3所示,本实用新型实施例公开了一种水下机器人结构,包括:
33.主体框架1,主体框架1内部上方形成浮力槽;
34.浮力块2,浮力块2安装在浮力槽内;
35.过滤网3,过滤网3围设在主体框架1的外围;
36.多个垂直推进器4,多个垂直推进器4分别安装在主体框架1内部上方的四个角端且均包裹在过滤网3内,并且垂直推进器4贯穿浮力块2;
37.多个水平推进器5,多个水平推进器5分别安装在主体框架1内部下方的四个角端且均包裹在过滤网3内;
38.电源控制舱6和驱动舱7,电源控制舱6及与其电性连接的驱动舱7均固定在主体框架1下部且均包裹在过滤网3内;多个垂直推进器4和多个水平推进器5均与驱动舱7电性连接。
39.本实用新型结构简单,通过浮力块2为主体框架1提供浮力,垂直推进器4为主体框架的上浮下潜及俯仰横滚运动提供动力,水平推进器5为主体框架的前进后退和左转右转及左移右移提供动力,动作灵活,能够携带作业工具全方位运动;并且过滤网3对水下环境中水草及鱼绳等杂物进行过滤,避免垂直推进器4和水平推进器5缠绕上杂物导致停转故障。
40.具体的,还包括保护板架8,保护板架8固定在主体框架1上部遮盖住浮力块2,并且与过滤网3外围紧贴固定;垂直推进器4依次贯穿浮力块2和保护板架8。
41.具体的,还包括多个带照明灯的摄像头9、两个短基线定位信标10和姿态导航仪11,多个带照明灯的摄像头9分别安装在浮力块2的外围并且贯穿浮力块2,多个带照明灯的摄像头9均与电源控制舱6电性连接;两个短基线定位信标10分别固定在主体框架1内部上方两侧且贯穿浮力块2;姿态导航仪11安装在主体框架1上且位于浮力块2的下方,姿态导航仪11与电源控制舱6电性连接。
42.具体的,还包括布放回收头12,布放回收头12铰接在主体框架1中央,并且贯穿浮力块2。
43.具体的,垂直推进器4与主体框架1竖直方向呈5
‑
20
°
夹角。
44.具体的,主体框架1为不锈钢或钛合金材质;保护板架8为pe或聚丙烯材质。
45.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
46.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。