1.本实用新型涉及水下滑翔机领域,尤其涉及一种可长时间采集信息的水下滑翔装置。
背景技术:
2.水下滑翔机是一种特殊类型的水下自主航行器,它没有螺旋桨或者推进器等动力装置,它通过机内的可变浮力系统来控制自身的浮力变化,并通过滑翔翼将正浮力和负浮力转化为向前的推力,从而驱动滑翔机前进。其利用净浮力和姿态角调整获得推进力,能源消耗小,只在调整净浮力和姿态角时消耗少量能源,并且具有效率高、续航力大的特点。但与其高效特点相伴的是其相对固定的运动形式和姿态,在水下只能做锯齿形和螺旋回转轨迹航行,机身姿态不能处于水平状态,只能保持一个攻角滑翔,机身回转半径大,在执行多样性观测任务时有明显缺陷,并且其航迹控制和定位精度低,航速慢,在风浪较大的海面可能会出现随波逐流的情况。国内现有水下滑翔机普遍续航力不足,导致无法完成长时间的观测任务;同时需要增加水下滑翔机回收及再次布放的人力及费用,严重制约了我国海洋科学和相关海洋业务的发展。以水下滑翔机观测海洋中尺度涡现象为例,寿命较长的涡旋存活时间可以达到170天以上;而国产水下滑翔机续航能力普遍不能达到半年时间,无法获取中尺度涡生成、延续、分裂、汇合、消散的整个演化过程数据。所以国内海洋研究机构与海洋业务单位对长续航能力水下滑翔机的需求非常迫切。
技术实现要素:
3.本实用新型的目的在于提供一种可长时间采集信息的水下滑翔装置,以解决现有技术中水下滑翔机结构复杂、能源利用率低、续航力不足的问题。
4.为实现上述目的,本实用新型提供如下技术方案:一种可长时间采集信息的水下滑翔装置,包括依次密封连接的头部舱段、姿态调节舱段、设备安装舱段、浮力调节舱段及尾部舱段,其中设备安装舱段的两侧对称安装有水平翼,所述姿态调节舱段内安装有改变俯仰角的姿态调节模块,所述设备安装舱段中固定安装有动力电池和控制单元,所述浮力调节舱段内安装有浮力调节模块,所述尾部舱段上端安装有尾翼,所述姿态调节模块包括第一滚珠丝杠组件和设置于第一滚珠丝杠组件上的配重驱动电源,所述水平翼上设置有蜗轮发电机,所述蜗轮发电机通过稳压器与动力电池相连,所述控制单元与浮力调节模块和姿态调节模块电性连接。在下潜起始阶段,通过浮力调节模块减小自身排水体积,使重力大于浮力,开始下潜;到达设定深度后,在浮力调节模块作用下,改变自身排水体积,使其所受浮力大于重力,从而实现下潜到上浮的转变。在下潜和上浮过程中,借助固定水平翼上的水动力产生水平运动,从而实现了在纵平面内锯齿形滑翔运动。在滑翔过程中,通过调整内部配重驱动电源沿滑翔机主轴线前后移动,实现滑翔机自身姿态的控制。具有功耗低、隐蔽性好、效率高、续航力强、维护费用低、可重复使用和大量投放等特点,其作为一种海洋移动观探测设备,可广泛应用于海洋安全体系和水文环境观测体系建设。
5.作为上述技术方案的进一步改进:
6.所述浮力调节模块包括第二滚珠丝杠组件和与第二滚珠丝杠组件相连的波纹囊,所述波纹囊一端与外界相连。
7.所述第一滚珠丝杠组件包括第一滚珠丝杠和第一滚珠丝杠副,所述配重驱动电源设置于第一滚珠丝杠副上。
8.所述第二滚珠丝杠组件包括第二滚珠丝杠和第二滚珠丝杠副,所述波纹囊与第二滚珠丝杠副相连。
9.所述第一滚珠丝杠和第二滚珠丝杠通过联轴器相连,所述联轴器处设置有驱动电机。
10.与现有技术相比,本实用新型的有益效果是:
11.本实用新型的一种可长时间采集信息的水下滑翔装置搭载了多种传感器,获取多种数据信息。包括声学矢量水听器及其相应的信号处理系统,可以有效的获得水下目标的方位信息第一滚珠丝杆和第二滚珠丝杆采用同一套控制设备进行驱动,能耗低,在水平翼上设置蜗轮发电机对动力电池进行充电,保证了滑翔装置的使用时间,将控制设备的电源和运动设备的电源分开,延长了电源使用时间,有利于实现长时间的数据采集。
附图说明
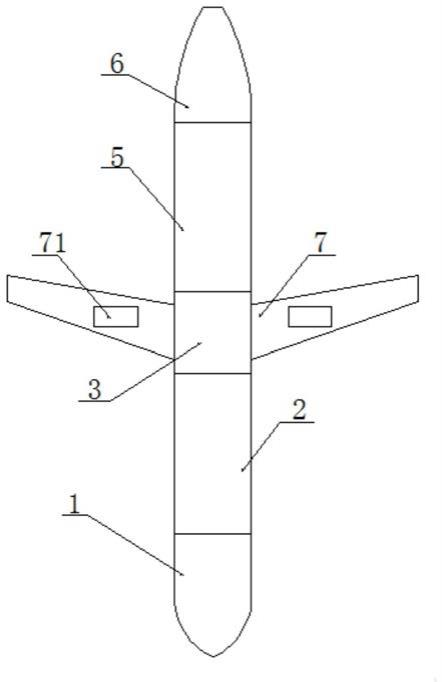
12.图1为本实用新型仰视结构示意图;
13.图2为本实用新型正视结构示意图;
14.图3为本实用新型内部结构示意图。
15.附图标记:1、头部舱段;2、姿态调节舱段;3、设备安装舱段;4、联轴器;5、浮力调节舱段;6、尾部舱段;7、水平翼;31、动力电池;61、尾翼;71、蜗轮发电机;213、配重驱动电源;214、第一滚珠丝杠;215、第一滚珠丝杠副;25、驱动电机;522、波纹囊;523、第二滚珠丝杠;524、第二滚珠丝杠副。
具体实施方式
16.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
17.在本实用新型的描述中,需要说明的是,术语“上”、“下”、“内”、“外”“前端”、“后端”、“两端”、“一端”、“另一端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
18.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行
清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.如图1至图3所示,本实施例的可长时间采集信息的水下滑翔装置,包括耐压结构壳体,其使用椭圆回转体外形,具有良好的水动力特性。其密封性要求高,增加装置水下工作可靠性、提高任务的持续时间。耐压壳体内部包括依次密封连接的头部舱段1、姿态调节舱段2、设备安装舱段3、浮力调节舱段5及尾部舱段6,各舱端耐压外壳由硬铝合金构成,各舱段间的端盖与壳体间有o型圈、防水垫圈进行密封。头部舱段1可装载各类传感器(ctd或前视、侧扫声纳等),壳体表面做特殊的表面处理以减少海洋生物的附着繁殖。其中设备安装舱段3的两侧对称安装有水平翼7,姿态调节舱段2内安装有改变俯仰角的姿态调节模块,设备安装舱段3中固定安装有动力电池31和控制单元,浮力调节舱段5内安装有浮力调节模块,尾部舱段6上端安装有尾翼61,姿态调节模块包括第一滚珠丝杠组件和设置于第一滚珠丝杠组件上的配重驱动电源213,水平翼7上设置有蜗轮发电机71,蜗轮发电机71通过稳压器与动力电池31相连,控制单元与浮力调节模块和姿态调节模块电性连接。水平翼7和尾翼61均采用naca翼型,配重驱动电源213为装载的各种电子设备提供必要的能源,且同时满足长时小功率输出状态,动力电池31为浮力调节模块和姿态调节模块提供必要能源,满足短时大功率输出两种状态。整个装置在水中运动过程中带动蜗轮发电机71运转,将获得的电能输送给动力电池31,能够对动力电池31进行充电,延长滑翔装置的使用时间。
21.浮力调节模块包括第二滚珠丝杠组件和与二滚珠丝杠组件相连的波纹囊522,波纹囊522一端与外界相连。第一滚珠丝杠组件包括第一滚珠丝杠214和第一滚珠丝杠副215,配重驱动电源213设置于第一滚珠丝杠副215上。第二滚珠丝杠组件包括第二滚珠丝杠523和第二滚珠丝杠副524,波纹囊522与第二滚珠丝杠副524相连。第一滚珠丝杠214和第二滚珠丝杠523通过联轴器4相连,联轴器4处设置有驱动电机25。联轴器4在此处为动力分配机构,驱动电机25通过与联轴器4相连,继而带动第一滚珠丝杠214和第二滚珠丝杠523运动,继而带动第一滚珠丝杠副215和第二滚珠丝杠副524运动,运动可以为同步同向运动,可以速度不同的同向运动,可以为同步反向运动,也可以为速度不同的反向运动,该运动方式本领域技术人员可参考汽车传动、机械传动而获悉。
22.使用时,通过驱动电机25带动联轴器4两端的第一滚珠丝杠214和第二滚珠丝杠523转动,通过控制单元对联轴器4进行控制,控制输出速度和输出方向,而实现浮力变化和姿态变化,下行时,配重驱动电源213朝头部舱段1运行,第二滚珠丝杠副524带动波纹囊522朝头部舱段1方向运动,水体进入波纹囊522,浮力减小,上行时,配重驱动电源213朝尾部舱段6方向运行,第二滚珠丝杠副524带动波纹囊522朝尾部舱段6方向运动,将水体推出波纹囊522,浮力增小,其运动均受到控制单元对联轴器4的控制。控制单元通过上位机的调整可以对姿态进行调整。
23.以上所述的仅是本实用新型的实施例,方案中公知的具体结构及特性等常识在此未作过多描述。对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要
件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。