1.本发明涉及水草清除领域,具体是一种智慧城市智能调整的水草切割系统。
背景技术:
2.在如今的大很多的水域,由于一些其中存在许多水生植物,没到夏季温度升高时,水体内的水质富营养化严重,大量的水上植物快速繁殖,使水体进一步恶化,严重的还会影响到人们的饮水安全,甚至还会导致大量鱼类的死亡。目前,治理水草的方法大多还是人工将水草进行打捞,这样不仅会对相关人员带来的生命安全威胁,同时效率也很低;对于大多数的清理装置来说,它们自带的刀具在工作时非常容易被水草缠绕,同时大多数的装置只能在深水水域工作,当其靠近岸边时,其切割刀具将有很大可能被水底的石块和其他障碍物损坏,所以针对此现象在此设计了一种智慧城市智能调整的水草切割系统,可以将水草切割刀在不同的水域自动调节工作深度,同时还可以防止切割刀被水草缠绕。
技术实现要素:
3.本发明的目的是针对现有技术中存在的上述问题,提出了一种智慧城市智能调整的水草切割系统,可以将水草切割刀在不同的水域自动调节工作深度,同时还可以防止切割刀被水草缠绕。
4.为了实现上述目的,本发明采用以下技术方案:一种智慧城市智能调整的水草切割系统,包括打捞船体,所述打捞船体中间船体部位固设有水草打捞输送带,所述输送带靠近船头方向的一侧固设有第一固定板,所述第一固定板远离所述打捞船体的一方固设有水草收集转板,所述打捞船体远离所述水草收集转板的一侧固设有发动机,所述发动机上连接有推动涡轮扇叶,所述打捞船体的船身下方固设有水草切割机,所述水草切割机靠所述打捞船体船头和船尾两端各设有两组深度探测杆组。
5.优选的,所述打捞船体的中间船身处设有电机固定座,所述电机固定座上固设有第一电机,所述打捞船体的位于安装有所述第一电机的一侧固设有第二固定板,所述第二固定板上固设有可转动的第一传动件,所述输送带通过所述第一传动件与所述第一电机相连,所述第一电机上固设有第二传动件,所述第二传动件上通过传动链连接有水草收集传动件,所述水草收集传动件通过固定在所述打捞船体船头一端的两个第三固定板固定,所述水草收集传动件远离所述传动链的一端转动连接有水草收集转板,所述输送带靠近船头方向的一侧固设有第一固定板,所述水草收集转板另一端固定在所述第一固定板上。
6.优选的,所述两组深度探测杆组每组各有两个深度探测杆,所述打捞船体的每侧船身各设有两个探测杆伸缩推动件,每个所述深度探测杆固定在所述伸缩推动件上,每根所述深度探测杆靠近所述打捞船体的一端为固定元件,每根所述深度探测杆另一端设有伸缩杆,每根所述伸缩杆远离所述打捞船体的一端设有第一转动连接件,每个所述第一转动连接件远离每个所述伸缩杆的一端设有弧形接触探测板,所述打捞船体两侧的每两个深度探测杆之间连接有第一固定杆,每根所述第一固定杆与每根所述深度探测杆连接处设有第
二转动连接件,所述打捞船体两侧的每两个深度探测杆之间在每根所述第一固定杆靠近所述打捞船体的一方固设有第一传动杆固定槽。
7.优选的,所述第一固定杆中间部分设有第三转动连接件,每根所述深度探测杆内部设有滑动槽,每个所述滑动槽中设有第二传动杆,每根所述第二传动杆靠近所述接触探测板的一侧连接有第四转动连接件,每个所述第四转动连接件设有第三传动杆,每个所述第三传动杆远离所述第四转动连接件的一端设有第五转动连接件,每个所述第五转动连接件连接至所述第一固定杆上,所述第二传动杆远离所述第四转动连接件的一端设有弧形转动契块,所述弧形转动契块与所述第二传动杆相垂直的方向设有第一传动杆。
8.优选的,所述水草切割机靠近所述打捞船体一侧固设有两个切割机安装孔,每个所述切割机安装孔中固设有切割机,每个所述切割机中设有空腔,每个所述空腔中间部位设有切割刀转动件,每个所述切割刀转动件中设有l形杆件,所述切割刀转动件远离所述切割机安装孔的方向固设有刀片安装块,每个所述刀片安装块上固定连接有四片切割刀片,每个所述l形杆件靠近所述刀片安装块的一端设有半球状固定件,所述半球状固定件在所述切割刀转动件内部的一端固设有呈轴向伞架状分布的刀片保护块,每个所述刀片保护块都有扩张弹性,所述水草切割机靠近所述打捞船体一侧固设有转动件,所述转动件固定在所述打捞船体底部的环形固定板上。
9.优选的,每个所述空腔远离所述切割机安装孔一端固设有第二电机,所述第二电机在远离所述切割刀片的方向固设有第一传动带轮,所述第一传动带轮远离所述第二电机的一侧固设有第二传动带轮,所述第一传动带轮通过第一传动带连接至所述切割刀转动件上,所述第二传动带轮通过第二传动带连接至第三传动带轮上,在每个空腔的所述第三传动带轮远离所述切割刀片的一侧同高度处固设有第二固定板,每个所述第二固定板上固设有转动柱,所述转动柱外圆面上设有螺纹状接触槽,所述螺纹状接触槽并非饶所述转动柱一周,其中留有空隙,所述切割刀转动件面向所述转动柱的一侧设有齿轮接触槽,所述切割刀转动件靠近所述切割刀片的一方固设有传动环,所述传动环上径向分布有一圈的清除刀安装杆,每个所述清除刀安装杆另一端固设有水草清除刀片。
10.有益效果:本发明通过改进在此提供一种智慧城市智能调整的水草切割系统。与现有技术相比,具有如下改进及优点:
11.1,通过此装置的自动调节切割刀工作深度的设计,可以实现对不同水域实现水草的清理和打捞工作。
12.2,通过此装置的水草切割刀的往复运动设计可以有效地避免切割刀被水草缠绕的情况。
13.3,通过装置的接触弹出保护设计,可以非常有效地避免切割刀在水下工作时,由于与石块等障碍物的碰撞的现象。
14.4,通过船体构的设计可以将切割后的水草进行打捞,提高工作效率。
附图说明
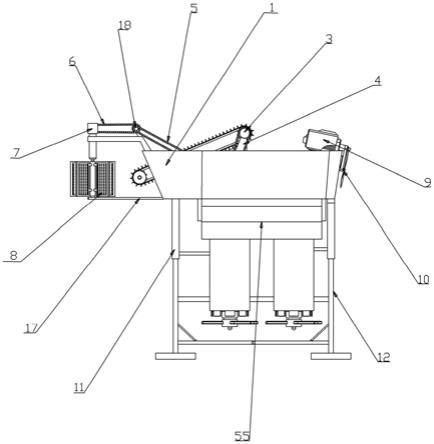
15.图1是本发明的机构示意图;
16.图2是本发明的侧视图;
17.图3是本发明的俯视图;
18.图4是本发明中切割机构的结构示意图;
19.图5是本发明中切割机构的侧视图;
20.图6是图3中a
‑
a处剖视图;
21.图7是图5中b
‑
b处剖视图;
22.图8是图4中c
‑
c处剖视图;
23.图9是图6中d处局部放大图;
24.图中:打捞船体1,输送带2,第一固定板17,水草收集转板8,发动机9,推动涡轮扇叶10,水草切割机55,电机固定座56,第一电机24,第二固定板4,第一传动件3,第二传动件18,传动链6,水草收集传动件7,第三固定板57,深度探测杆11,探测杆伸缩推动件21,伸缩推动件21,伸缩杆12,第一转动连接件19,接触探测板13,第一固定杆14,第二转动连接件35,第一传动杆固定槽15,第三转动连接件25,滑动槽30,第二传动杆29,第四转动连接件28,第三传动杆27,第五转动连接件26,转动契块31,第一传动杆32,切割机安装孔33,空腔34,切割刀转动件38,l形杆件50,刀片安装块37,切割刀片36,固定件52,刀片保护块51,第二电机42,第一传动带轮43,第二传动带轮44,第一传动带49,第二传动带48第三传动带轮57,第二固定板47,转动柱45,接触槽54,齿轮接触槽46,传动环41,清除刀安装杆40,水草清除刀片39,转动件53,环形固定板16。
具体实施方式
25.以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
26.在本发明的描述中,需要说明的是,术语“内”、“下”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
27.结合附图1
‑
9,一种智慧城市智能调整的水草切割系统,包括打捞船体1,打捞船体1中间船体部位固设有水草打捞输送带2,输送带2靠近船头方向的一侧固设有第一固定板17,第一固定板17远离打捞船体1的一方固设有水草收集转板8,打捞船体1远离水草收集转板8的一侧固设有发动机9,发动机9上连接有推动涡轮扇叶10,打捞船体1的船身下方固设有水草切割机55,水草切割机55靠打捞船体1船头和船尾两端各设有两组深度探测杆组。
28.进一步的,打捞船体1的中间船身处设有电机固定座56,电机固定座56上固设有第一电机24,打捞船体1的位于安装有第一电机24的一侧固设有第二固定板4,第二固定板4上固设有可转动的第一传动件3,输送带2通过第一传动件3与第一电机24相连,第一电机24上固设有第二传动件18,第二传动件18上通过传动链6连接有水草收集传动件7,水草收集传动件7通过固定在打捞船体1船头一端的两个第三固定板57固定,水草收集传动件7远离传动链6的一端转动连接有水草收集转板8,输送带2靠近船头方向的一侧固设有第一固定板17,水草收集转板8另一端固定在第一固定板17上。
29.进一步的,两组深度探测杆组每组各有两个深度探测杆11,打捞船体1的每侧船身各设有两个探测杆伸缩推动件21,每个深度探测杆11固定在伸缩推动件21上,每根深度探
测杆11靠近打捞船体1的一端为固定元件,每根深度探测杆11另一端设有伸缩杆12,每根伸缩杆12远离打捞船体1的一端设有第一转动连接件19,每个第一转动连接件19远离每个伸缩杆12的一端设有弧形接触探测板13,打捞船体1两侧的每两个深度探测杆11之间连接有第一固定杆14,每根第一固定杆14与每根深度探测杆11连接处设有第二转动连接件35,打捞船体1两侧的每两个深度探测杆11之间在每根第一固定杆14靠近打捞船体1的一方固设有第一传动杆固定槽15。
30.进一步的,第一固定杆14中间部分设有第三转动连接件25,每根深度探测杆11内部设有滑动槽30,每个滑动槽30中设有第二传动杆29,每根第二传动杆29靠近接触探测板13的一侧连接有第四转动连接件28,每个第四转动连接件28设有第三传动杆27,每个第三传动杆27远离第四转动连接件28的一端设有第五转动连接件26,每个第五转动连接件26连接至第一固定杆14上,第二传动杆29远离第四转动连接件28的一端设有弧形转动契块31,弧形转动契块31与第二传动杆29相垂直的方向设有第一传动杆32。
31.进一步的,水草切割机55靠近打捞船体1一侧固设有两个切割机安装孔33,每个切割机安装孔33中固设有切割机,每个切割机中设有空腔34,每个空腔34中间部位设有切割刀转动件38,每个切割刀转动件38中设有l形杆件50,切割刀转动件38远离切割机安装孔33的方向固设有刀片安装块37,每个刀片安装块37上固定连接有四片切割刀片36,每个l形杆件50靠近刀片安装块37的一端设有半球状固定件52,半球状固定件52在切割刀转动件38内部的一端固设有呈轴向伞架状分布的刀片保护块51,每个刀片保护块51都有扩张弹性,水草切割机55靠近打捞船体1一侧固设有转动件53,转动件53固定在打捞船体1底部的环形固定板16上。
32.进一步的,每个空腔34远离切割机安装孔33一端固设有第二电机42,第二电机在远离切割刀片36的方向固设有第一传动带轮43,第一传动带轮43远离第二电机42的一侧固设有第二传动带轮44,第一传动带轮43通过第一传动带49连接至切割刀转动件38上,第二传动带轮44通过第二传动带48连接至第三传动带轮57上,在每个空腔34的第三传动带轮远离切割刀片36的一侧同高度处固设有第二固定板47,每个第二固定板47上固设有转动柱45,转动柱45外圆面上设有螺纹状接触槽54,螺纹状接触槽54并非饶转动柱45一周,其中留有空隙,切割刀转动件38面向转动柱45的一侧设有齿轮接触槽46,切割刀转动件38靠近切割刀片36的一方固设有传动环41,传动环41上径向分布有一圈的清除刀安装杆40,每个清除刀安装杆40另一端固设有水草清除刀片39。
33.本发明的工作原理:
34.首先当施工人员乘此装置到达工作区域时,打捞船体1的每侧船身各设有两个探测杆伸缩推动件21,每个深度探测杆11固定在伸缩推动件21上,每根深度探测杆11另一端设有伸缩杆12,每根伸缩杆12一端设有弧形接触探测板13,通过伸缩杆12可以将四个弧形接触探测板13推至与水底接触的位置,打捞船体1两侧的每两个深度探测杆11之间连接有第一固定杆14,每根第一固定杆14与每根深度探测杆11连接处设有第二转动连接件35,打捞船体1两侧的每两个深度探测杆11之间在每根第一固定杆14靠近打捞船体1的一方固设有第一传动杆固定槽15,水草切割机55靠打捞船体1船头和船尾两端各设有两组深度探测杆组,通过不同侧的两根深度探测杆11的伸缩情况,水草切割机55在转动件53的作用下进行转动,从而实现对工作水域深度的调节。
35.当切割机构遇到障碍物时,第三转动连接件25将进行转动,同时,第三传动杆27一端将向上运动推动第二传动杆29,第二传动杆29将与弧形转动契块31接触并推动其转动,弧形转动契块31与第二传动杆29相垂直的方向设有第一传动杆32,每个空腔34中间部位设有切割刀转动件38,每个切割刀转动件38中设有l形杆件50,第一传动杆32在弧形转动契块31的转动下将推动l形杆件50,半球状固定件52在切割刀转动件38内部的一端固设有呈轴向伞架状分布的刀片保护块51,每个刀片保护块51都有扩张弹性,l形杆件50在第一传动杆32作用下将向下运动,此时刀片保护块51将被弹出,将对刀片进行保护。
36.当切割机构在水下进行工作时,每个空腔34远离切割机安装孔33一端固设有第二电机42,传动环41上径向分布有一圈水草清除刀片39,传动环41在第二电机42的带动下通过第一传动带49将水草清除刀片39进行旋转切割,同时转动柱45在第二电机42的带动下通过第二传动带48进行转动,转动柱45外圆面上设有螺纹状接触槽54,切割刀转动件38面向转动柱45的一侧设有齿轮接触槽46,齿轮接触槽46与螺纹状接触槽54相啮合,螺纹状接触槽54并非饶转动柱45一周,其中留有空隙,所以切割刀转动件38运动至空隙处时,在自身重力作用下进行下降,从而实现切割刀转动件38的往复运动,传动环41上径向分布有一圈水草清除刀片39,水草清除刀片39在第二电机42的带动下对切割刀片36上可能缠绕的水草进行切割。
37.当装置工作时,打捞船体1的中间船身处设有电机固定座56,电机固定座56上固设有第一电机24,输送带2通过第一传动件3与第一电机24相连,第二传动件18上通过传动链6连接有水草收集传动件7,水草收集传动件7远离传动链6的一端转动连接有水草收集转板8,水草收集转板8可将切割机构切割的水草进行收集,在输送带2作用下进行打捞。
38.以上所述仅为本发明的实施例,并非因此限制本发明的专利保护范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。