1.本发明属于检查设备技术领域,具体涉及一种高流速动水条件下长隧洞流道检查系统。
背景技术:
2.导流洞是用于施工导流目的的隧洞。工程导流洞具有设计安全运行年限,若超期服役,洞身结构存在重大安全隐患;为了保障超期服役导流洞的安全导流,需对导流洞的整个洞身段以及门槽部位结构进行水下检查,以确保导流洞洞身结构的完好性,近而保障导流洞的导流安全性,因此对导流洞的洞身检测是一项有必要且有重要意义的工作。
3.以往对大坝导流洞运行情况的检查,是通过潜水器完成,例如通过rov潜水器远程供电与操控,在水流流速满足rov潜水器探测速度的条件下,可进行长隧洞洞身检测作业。
4.在导流洞水流流速较大时,如流速在6
‑
12m/s之间,远远超出rov潜水器自主探测速度;导流洞洞身较长(约1.3km)且不在一直线上路径,即存在一定的角度,导流洞水流快流态紊乱,导致rov潜水器存在与洞壁的碰撞损坏且无法在紊乱流态下平稳运行;洞身长,也将导致rov潜水器自身无定位系统无法进行缺陷的准确定位,严重影响导流洞洞身检测的质量与准确性。
技术实现要素:
5.本发明的目的是提供一种高流速动水条件下长隧洞流道检查系统,解决了高流速动水作业条件下rov潜水器无法使用的问题。
6.为了实现上述目的,本发明采用以下技术方案:
7.一种高流速动水条件下长隧洞流道检查系统,包括牵引装置、检查船、检查模块和导航模块;
8.牵引装置包括至少一个驱动器和牵引绳,驱动器固定在岸基上,牵引绳一端连接驱动器,牵引绳另一端穿过隧洞并延伸至隧洞外;
9.检查船漂浮于流道上并连接牵引绳,以使检查船在驱动器作用下沿牵引绳流动;
10.检查模块和导航模块均设置在检查船上,导航模块通信连接驱动器以使检查船在隧洞中匀速流动,检查模块在检查船流动过程中检查隧洞。
11.在一种可能的设计中,检查船包括两个并排设置的船体、两船体之间的连接结构和位于船体上的防撞结构,其中,连接结构设置为至少两层,且层间设有若干个第一连接杆;
12.防撞结构包括弧形板和第二连接杆,弧形板所在平面上,弧形板自一个船体延伸至另一个船体,以罩住检查船的前端,弧形板的内侧通过第二连接杆连接船体,弧形板的外侧敷设有由防撞材料组成的防撞层。
13.在一种可能的设计中,同一层的连接结构构造为若干个间隔设置的连杆,连杆的两端分别固定在一船体上,相邻连杆之间设有若干个支撑杆;
14.上下层的连接结构之间通过第一连接杆相连,第一连接杆的两端分别连接一连杆。
15.在一种可能的设计中,船体前端和后端均设置为流线型,船体的头部在平面投影呈等腰三角形,且夹角小于60度,船体的尾部设有适配于牵引绳的牵引点;
16.船体位于吃水线以下部分设置为圆弧形,船体内放置有压重,船体的外侧设有舭龙骨,以使船体的重心和稳心位于同一垂直线上。
17.在一种可能的设计中,驱动器设置为卷扬机,卷扬机包括机座、可转动设置在机座上的卷筒、用于驱动卷筒转动的电机和三个抱闸,其中,牵引绳绕设在卷筒上,卷筒上还设有排绳器,电机通过减速箱连接卷筒,抱闸中一者连接减速箱,一者连接电机,一者连接滚筒。
18.在一种可能的设计中,连接滚筒的抱闸设置为手动抱闸,手动抱闸包括拉杆、传动杆和箍环;
19.拉杆的下端铰接在机座上,拉杆的上端设有握柄,拉杆的下端可设置踏板;
20.传动杆一端连接拉杆,传动杆另一端向滚筒方向延伸并连接箍环;
21.箍环一端为连接端,箍环另一端为绕过卷筒转动轴的拉紧端,拉紧端处设有连接槽,传动杆穿过连接槽并连接箍环的连接端;
22.相应地,机座上设有至少一个导向座,导向座上设有适配于传动杆的导向槽。
23.在一种可能的设计中,检查模块设置为水下多波束侧扫声呐,导航模块设置为惯性导航系统和航速辅助系统。
24.在一种可能的设计中,检查船的尾部设有照明摄像模块,照明摄像模块设置为若干个摄像仪;
25.检查船上还设有供电模块,供电模块分为电连接检查模块、导航模块和照明摄像模块。
26.在一种可能的设计中,检查船上设有防水模块,防水模块选用防水箱和/或防水罩,防水箱和/或防水罩覆盖在检查模块、导航模块、照明摄像模块和供电模块上。
27.有益效果:
28.一种高流速动水条件下长隧洞流道检查系统可在高流速动水作业条件对隧洞进行检查,实现了对长隧洞进行全覆盖扫描,获取水下地形以及水下地貌资料,可用于分析导流洞洞身混凝结构表观完整性情况,准确圈定混凝土结构破损的空间位置分布解决了高流速动水作业条件下rov潜水器无法使用的问题。
29.同时,检查船上设有供电模块,自带电源,无需远程供电,降低施工难度及危险性。
30.此外,通过水下多波束侧扫声呐与照明摄像模块相互配合,可以同时对隧洞内水上、水下部分进行检测,而rov潜水器只能对水下部分进行检测,有效拓展了检查范围,检查质量更好。
附图说明
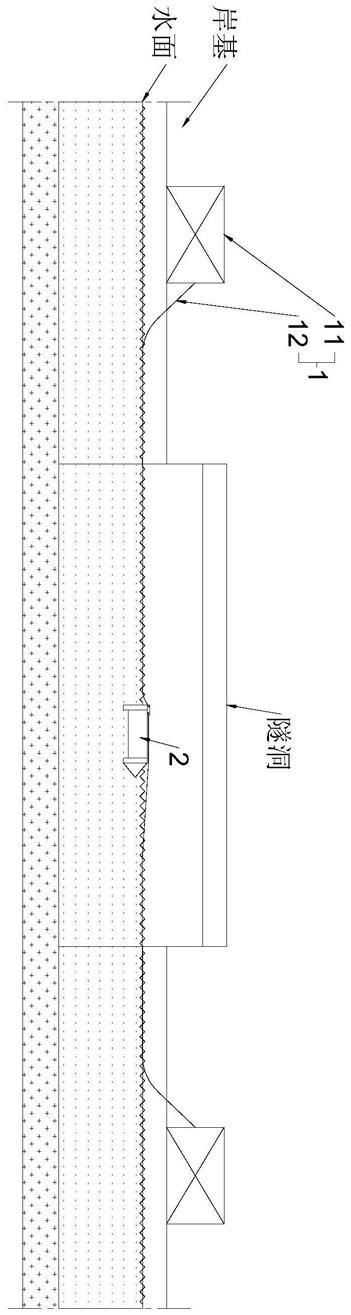
31.图1为一种高流速动水条件下长隧洞流道检查系统的结构示意图。
32.图2为检查船的俯视结构示意图。
33.图3为检查船的结构示意图。
34.图4为检查船位于水中时的结构示意图。
35.图5为上层的连接结构的结构示意图。
36.图6为下层的连接结构的结构示意图。
37.图7为未设置手动抱闸时,卷扬机的结构示意图。
38.图8为设置手动抱闸时,卷扬机的侧视结构示意图。
39.图9为检查模块、导航模块、照明摄像模块和供电模块的连接示意图。
40.图中:
41.1、牵引装置;11、驱动器;12、牵引绳;111、机座;112、卷筒;113、电机;114、抱闸;101、拉杆;102、传动杆;103、箍环;104、踏板;105、导向座;2、检查船;21、船体;22、连接结构;23、防撞结构;231、防撞框;232、防撞垫;201、弧形板;202、第二连接杆;203、连杆;204、支撑杆;205、第一连接杆;206、牵引点;207、舭龙骨。
具体实施方式
42.实施例:
43.rov潜水器,即遥控无人潜水器,是用于水下观察、检查和施工的水下机器人。系统组成一般包括:动力推进器、遥控电子通讯装置、黑白或彩色摄像头、摄像俯仰云台、用户外围传感器接口、实时在线显示单元、导航定位装置、自动舵手导航单元、辅助照明灯和凯夫拉零浮力拖缆等单元部件。功能多种多样,不同类型的rov用于执行不同的任务。
44.但用于高流速动水条件下的长隧洞检查时,rov潜水器处于非平稳状态,检测的效果差,同时rov潜水器的操控性下降,容易与隧洞碰撞,造成rov潜水器的损坏。鉴于此,本发明提出一种高流速动水条件下长隧洞流道检查系统,以取代rov潜水器,实现在高流速动水条件下的检测作业。
45.如图1
‑
9所示,一种高流速动水条件下长隧洞流道检查系统,包括牵引装置1、检查船2、检查模块和导航模块;其中,检查船2可沿隧洞漂流,检查模块放置于检查船2上,在检查船2航行过程中实现对隧洞的检查,二者相互配合达到了取代rov潜水器的目的。
46.同时,通过牵引装置1和导航模块的相互配合,前者对检查船2的航速进行控制,从而确保检查船2航行过程中处于相对稳定状态,后者也放置于检查船2上并实施监控检查船2,工作人员通过导航模块掌握检查船2的实时信息,如航向、航速等,进而调节牵引装置1,一方面使检查船2保持相对稳定,另一方面避免检查船2碰撞隧洞内壁。
47.本高流速动水条件下长隧洞流道检查系统通过检查船2上所搭载的检查模块对长隧洞进行全覆盖扫描,获取水下地形以及水下地貌资料,可用于分析导流洞洞身混凝结构表观完整性情况,准确圈定混凝土结构破损的空间位置分布。牵引装置1与导航模块相配合,引导并控制检查船2的船速、位置等,使检查船2处于相对稳定的状态,既避免了碰撞的发生,也保证了高流速紊流条件下检测的质量。
48.在一种可能的实现方式中,牵引装置1包括至少一个驱动器11和牵引绳12,驱动器11固定在岸基上,牵引绳12一端连接驱动器11,牵引绳12另一端穿过隧洞并延伸至隧洞外;检查船2漂浮于流道上并连接牵引绳12,以使检查船2在驱动器11作用下沿牵引绳12流动;检查模块和导航模块均设置在检查船2上,导航模块通信连接驱动器11以使检查船2在隧洞中匀速流动,检查模块在检查船2流动过程中检查隧洞。
49.检查模块和导航模块安装在检查船2上的合适位置后,检查船2下水并连接牵引绳12,工作人员通过操控驱动器11进而调节牵引绳12的收放,尽量使检查船2以恒定的速度航行。且工作人员通过终端至少通信连接导航模块,即检查模块可以设置为自动工作,从而不必连接终端,或者,检查模块也通信连接终端,工作人员通过终端实时控制检查模块的工作,以提高检测的质量。而导航模块所实时监测的信息需传回至终端,从而辅助工作人员实时调整驱动器11,以控制检查船2的航行与航速。
50.容易理解的,终端包括但不限于台式电脑、笔记本电脑、智能手机和智能平板。
51.驱动器11可以设置一个或者两个,当只有一个驱动器11时,即在长隧洞的上游位置设置一驱动器11,通过该驱动器11控制牵引绳12的收放以及收放速度,达到间接控制检查船2的目的;此时,长隧洞的下游位置设有对应的收揽结构,如压绳器或收绳器,牵引绳12的一端连接驱动器11,牵引绳12的另一端穿过隧洞后连接于该收揽结构。
52.当设有两个驱动器11时,长隧洞的上下游分别设置一驱动器11,牵引绳12的两端各连接一驱动器11,调节的灵活性更好。
53.下面结合各个部件的具体结构对检查过程进行说明:
54.在高流速的条件下,即使有牵引装置1进行引导,检查船2仍然有倾覆的可能性,因此对检查船2的结构进行改进,以增加其防倾覆性能,具体的,检查船2包括两个并排设置的船体21、两船体21之间的连接结构22和位于船体21上的防撞结构23,其中,连接结构22设置为至少两层,且层间设有若干个第一连接杆205。
55.检查船2通过两个并排的船体21构成双体船结构,相比于单体船,横摇时回复力矩是同样排水量的单体船的若干倍,摇摆周期短,检查船2的稳定性更好,同时,甲板开阔,提供了更多的安装空间;此外重量也有所增加,也有助提高防倾覆性能。
56.连接结构22用于将两个船体21连接在一起,且连接结构22设置为多层结构,增加连接点的数量,也提高了检查船2的结构强度。防撞结构23设置在船体21上,在不可避免的情况下,检查船2与隧洞发生碰撞,通过防撞结构23进行缓冲,降低碰撞对检查船2上检查模块和导航模块的影响。
57.检查船2设计为双体船结构,稳定性好,提高了防倾覆性能,双体船结构兼具操控性好的特点,方便工作人员对检查船2进行操控,有助于检查船2在检查过程中保持相对稳定,二者相互配合,则在隧洞检查过程,检查船2上各个设备的稳定性也更好,提高了检测的质量。
58.可选地,船体21由若干个板体组成,相邻板体之间通过螺栓相连,如此一来使船体21具有可拆卸性,操作更为灵活。优选地,螺栓选用8.8级高强度螺栓,以保证船体21的强度符合要求。
59.在本实施例中,防撞结构23包括防撞框231和防撞垫232,其中,防撞框231设置在船头处,船体21其余部分敷设防撞垫232。
60.高流速动水条件下,检查船2的速度也相对较快,失控时检查船2任何部分均有可能碰撞隧洞,因此,防撞结构23要对检查船2进行全面的防护,同时考虑到船头发生碰撞的概率最大,故通过防撞框231保护检查船2的船头部分,检查船2的其余部分敷设防撞垫232,既达到了全面防护的目的,又有效降低了防护成本。
61.在一种可能的实现方式中,防撞框231包括弧形板201和第二连接杆202,弧形板
201所在平面上,弧形板201自一个船体21延伸至另一个船体21,以罩住检查船2的前端,弧形板201的内侧通过第二连接杆202连接船体21,弧形板201的外侧敷设有由防撞材料组成的防撞层。
62.鉴于检查船2是双船体21结构,故弧形板201从一船体21的船头外侧延伸至另一船体21的船头外侧,以扩大覆盖的范围,避免出现防护死角。第二连接杆202既起到了连接作用,也配合弧形板201提高防撞框231的结构强度。
63.可选地,弧形板201至少外侧设计为流线型,在发生碰撞时可以快速滑走,使其余部分分散撞击,减少第一碰撞部位的受到冲击的时间,提高弧形板201的使用寿命。此外,防撞层可以采用防撞垫232代替,以降低成本。
64.在一种可能的实现方式中,防撞垫232由防撞高分子材料制成。防撞高分子材料包括但不限于聚甲醛和聚醚醚酮,或者也可以选择其他类型的防撞材料,如橡胶或经过调质处理的合金钢。
65.在一种可能的实现方式中,同一层的连接结构22构造为若干个间隔设置的连杆203,连杆203的两端分别固定在一船体21上,相邻连杆203之间设有若干个支撑杆204;上下层的连接结构22之间通过第一连接杆205相连,第一连接杆205的两端分别连接一连杆203。
66.如此一来,连接结构22分层设置,且通过支撑杆204连接相邻的连杆203,使同一层处的连接结构22形成网状结构;上下层连接结构22之间通过第一连接杆205相连,则将上下层相互连接,构成立体网状结构,进一步提高了连接结构22的结构强度,也就提高了检查船2的强度。同时,较为密集的立体网状结构增加了杆件的数量,也增加了检查船2的总重量,一定程度上增加了检查船2的稳定性。
67.可选地,连接结构22可拆卸连接于船体21,使检查船2具备可拆卸性,操作灵活,同时,运输时可将检查船2拆分,降低了所占用的空间,提高了运输的方便性。
68.在一种可能的实现方式中,参见图5,上层的连接结构22处设有四个等间隔设置的支撑杆204,支撑杆204的两端设有连接座,相邻支撑杆204之间设有三个连杆203,其中一个连杆203垂直于支撑杆204,另两个连杆203倾斜设置并分别位于垂直的连杆203的两侧。
69.在一种可能的实现方式中,参见图6,下层的连接结构22处设有四个等间隔设置的支撑杆204,支撑杆204的两侧各设有一连接板,相邻支撑杆204之间设有两个倾斜设置的连杆203。
70.在一种可能的实现方式中,船体21前端和后端均设置为流线型,船体21的头部在平面投影呈等腰三角形,且夹角小于60度。
71.此时,根据《港口工程荷载规范》(jts144
‑1‑
2010)计算水流阻力系数公式f
w
=c
w
×
ρ/2
×
a
×
v2,其中,a是计算构件在与流向垂直平面上的投影面积,船体21的尺寸数据设计为在平面投影上为腰长1.118m,底边长1.0m的等腰三角形,船体21的水流阻力系数小于等于0.65,远小于截面为矩形或桁架型水流阻力系数大于1,极大减小了水流阻力,有助于减小牵引装置1的工作难度。
72.可选地,船体21的尾部设有适配于牵引绳12的牵引点206;牵引点206可以构造为任意合适的结构,且牵引点206的数量可以根据实际使用需求进行选择。
73.在一种可能的实现方式中,船体21位于吃水线以下部分设置为圆弧形。此时,根据《港口工程荷载规范》(jts144
‑1‑
2010)水流对船舶产生的水流力纵向分力公式:f
yc
=c
yc
×
ρ/2
×
s
×
v2,其中,s是船舶吃水线以下的表面积,流速重量相同条件下船舶吃水线以下的表面积越小其浮力越大;但是在计算水流纵向水流力f
yc
中,要考虑受雷诺系数(r
e
)影响较大的水流纵向分力系数c
yc
,在水流纵向分力系数c
yc
=0.046r
e
‑
0.134
+b与雷诺系数r
e
=vl/v中,受水温要求较高的粘滞性系数ν与水的流速v来决定,综合上述影响因素,在船体21长度(l)与宽度(b)一定的条件下,设计为面积较小的圆弧形,以增大水浮力。
74.在一种可能的实现方式中,船体21内放置有压重,船体21的外侧设有舭龙骨207。在高流速动水条件下作业时,水流的高速冲击作用下,船体21重心较高可直接导致船体21出现倾覆与侧翻,因此在船体21内设有压重,优选地,压重设置在船体21的底部,进而形成低重心高稳心的结构,提高船体21在水中的稳定性。
75.同时,在船体21的两侧设置舭龙骨207,进而极大降低横摇和纵摇,牺牲船体21一定操作性的同时极大提高稳定性。配合于压重,极大降低了作业过程中出现倾覆的可能性。
76.即通过上述设计,使船体21的重心和稳心位于同一垂直线上,提高船体21在使用过程中的稳定性。容易理解的,在水深较浅的导流洞内使用时,检查船2整体缩比,提高检查船2与导流洞底部之间的距离,以避免在船体21在流动过程中磕碰导流洞的底部。
77.在本实施例中,驱动器11设置为卷扬机,卷扬机包括机座111、可转动设置在机座111上的卷筒112、用于驱动卷筒112转动的电机113和三个抱闸114,其中,牵引绳12绕设在卷筒112上,卷筒112上还设有排绳器,电机113通过减速箱连接卷筒112,抱闸114中一者连接减速箱,一者连接电机113,一者连接滚筒。
78.卷扬机是用卷筒112缠绕钢丝绳或链条提升或牵引重物的轻小型起重设备,可以垂直提升、水平或倾斜拽引重物,因操作简单、绕绳量大、移置方便而广泛应用。显然,卷扬机的规格要适配于检查船2,以能够牵引检查船2。此外,本实施例中的卷扬机设有多个抱闸114,实现多重抱紧,可有效控制牵引绳12的收放速度。在卷筒112上设置了排绳器,方便了牵引绳12的释施与回收。
79.结合实际检查作业环境进行说明,假定检查船2的重量约为4.75吨,隧洞的洞身长度约为1300米,检查船2的尾部设有四个牵引点206。此时,根据《港口工程荷载规范》(jts144
‑1‑
2010)水流对船舶产生的水流力纵向分力公式:f
yc
=c
yc
×
ρ/2
×
s
×
v2,船体21与水流平行时在水中受到的冲击力在8吨
‑
10吨之间,考虑到检查船2的尾部受到四点牵引力的牵引,其在水中的运行轨迹均为平行于水流方向,故取10吨最大水流冲击力为极值,同时考虑到牵引绳12拽引船体21向上游回收的功况,取其作业的安全系数为2,故取20吨作为船在水中的水流常态冲击力,综合考虑船体21顺水流以及逆水流回收受水流冲击力的情况,故卷扬机选取20吨变频式卷扬机,即20吨变频式卷扬机向检查船2提供牵引动力。
80.牵引绳12采用强度符合规范的钢丝绳进行牵引,考虑到钢丝绳过长时会沉没于隧洞的底部进而产生锚链作用,如果锚链与混凝土底板的摩擦力与水流冲击力相等时,会导致检查船2停滞于隧洞的某处,导致水下检测失败。故经对比选择,牵引绳12选用由超高分子量聚乙烯制成的缆绳,以代替钢丝绳,根据检查船2所受的冲击力、卷扬机布置位置和隧洞的洞身长度,选择长度l=2000m,直径φ=32mm的超高分子量聚乙烯漂浮缆绳2根,抗拉强度不小于70吨,满足使用的需要。可选地,当长隧洞检测是处于寒冷季节时,隧洞的洞壁处积有冰层,其中一超高分子量聚乙烯漂浮缆绳的外侧套2毫米保护套,以保护缆绳并增加磨损强度。
81.相应地,考虑到牵引绳12的长度和直径,绳容量较大,故在保证卷扬机强度的基础上,用于收纳的卷筒112需适当增加,以收纳牵引绳12,满足现场施工的要求。
82.该超高分子量聚乙烯漂浮缆绳,重量轻,可漂浮于水面,比同等直径的钢丝缆绳轻87.5%左右。同时具有强度高的特点,比同等直径的钢丝缆绳强度高1.5倍左右。且其具有较强的抗冲击性、耐用性、耐海水、耐化学药品、耐紫外线辐射及耐温差变化,反复使用质量不变。
83.卷扬机上设有三个抱闸114,其中电机113和减速箱处设有其中两个,形成了双抱闸114系统,保证了卷扬机的速度的操控性和使用的安全性。同时,在卷筒112上设置了手动抱闸114,具体结构如下:
84.在一种可能的实现方式中,连接滚筒的抱闸114设置为手动抱闸114,手动抱闸114包括拉杆101、传动杆102和箍环103;拉杆101的下端铰接在机座111上,拉杆101的上端设有握柄,拉杆101的下端可设置踏板104;传动杆102一端连接拉杆101,传动杆102另一端向滚筒方向延伸并连接箍环103;箍环103一端为连接端,箍环103另一端为绕过卷筒112转动轴的拉紧端,拉紧端处设有连接槽,传动杆102穿过连接槽并连接箍环103的连接端;相应地,机座111上设有至少一个导向座105,导向座105上设有适配于传动杆102的导向槽。
85.通过手动操作,电机113在停机状态下,减少牵引绳12的惯性移动。具体来说,手握拉杆101的握柄,向远离卷筒112方向拉动拉杆101,拉杆101以其与机座111的铰接处为中心转动。传动杆102随拉杆101滑动,且由于导向座105的限位,传动杆102沿一直线滑动。传动杆102的滑动使得箍环103收紧,即箍环103的连接端和拉紧端相互靠拢,进而夹紧卷筒112转轴,以停止卷筒112的转动。
86.同时,拉杆101的下端设有踏板104,以增加工作人员所施加的作用力,提高了使用的便捷性和停止卷筒112的有效性。此外,导向座105可以构造为任意合适的结构。
87.在本实施例中,检查模块设置为水下多波束侧扫声呐,导航模块设置为惯性导航系统和航速辅助系统。
88.采用水下多波束侧扫声呐进行侧扫、采用测量级全功能的惯性导航系统和航速辅助系统pathfinderdvl组合定位、并使用全球定位系统进行rtk实时差分定位方法实施测量定位。
89.水下多波束侧扫声呐具有测量精度高,量程范围大,分辨率高,测量效率高等一系列水下地形调查优势。检查船2搭载水下多波束侧扫声呐进行水下缺陷检测,检测过程中声呐信息自主保存,船体21在靠墙行进中单台声呐便可覆盖隧道全切面,保障因船体21无法控制造成的数据盲区。
90.现有的测绘技术基本上都是基于gps全球定位系统进行精准定位的,但在长隧道内部是无法接收到卫星定位信息的。使用带实时航速辅助的惯性导航系统可以很好的解决这个难题。该惯性导航系统解决了传统惯性导航系统累积误差增长过快的问题,总误差仅是航程的0.1%,同时又可以为水下多波束侧扫声呐提供高精度的艏向和姿态数据,集成度高,安装使用都很方便。
91.测量级全功能的惯性导航系统和航速辅助系统pathfinderdvl组合导航定位精度主要误差源包括dvl标度误差、惯导航向误差、惯导和dvl航向安装偏角。如果选用速度精度优于1.2%
±
0.2cm/s的dvl,则dvl标度误差引起最大定位误差1.2%d。惯导航向误差(9角
分)引起的定位误差0.3%d。为保证综合定位精度3%d,则惯性导航系统和航速辅助系统pathfinderdvl的航向安装偏角引起的定位误差应小于1.5%d,即偏角小于45角分。利用机械安装对准和水中标定相结合的方法,很容易将偏角控制在45角分之内,体现了检测过程的先进性。
92.具体的,水下多波束侧扫声呐的安装方法如下:
93.根据水浮力计算检查船2的吃水高度;根据隧洞的水深和宽度,确定水下多波束侧扫声呐的侧扫高度与范围;根据水中标定位置和水下多波束侧扫声呐侧扫角度,调整水下多波束侧扫声呐在检查船2上的位置;根据侧扫的效果,确定水下多波束侧扫声呐在检查船2上的位置。
94.即水下多波束侧扫声呐的侧扫角度是固定的,因此可调整其位于检查船2上的位置,进而调整水下多波束侧扫声呐距离导流洞底部的距离,找到最合适的设置高度,使水下多波束侧扫声呐的侧扫范围达到最大。
95.在本实施例中,检查船2的尾部设有照明摄像模块,照明摄像模块设置为若干个摄像仪;一方面进行照明,另一方面对隧洞进行视频录制,方便于工作人员进行分析。容易理解的,摄像仪自带内存卡,所录制的视频保存在内存卡中。
96.在本实施例中,检查船2上还设有供电模块,供电模块分为电连接检查模块、导航模块和照明摄像模块。优选地,供电模块设置在检查船2的重心处。
97.可选地,上述模块可以设置在检查船2上任意合适位置处,本发明对此并不作任何限制。
98.在本实施例中,检查船2上设有防水模块,防水模块选用防水箱和/或防水罩,防水箱和/或防水罩覆盖在检查模块、导航模块、照明摄像模块和供电模块上。如此一来,以免船体21在导流洞中发生碰撞损伤设备影响数据采集,也提高了防水性,扩大了各个模块的选择范围,可选用防水性能稍差的设备。
99.可选地,防水箱和防水罩均可构造为任意合适的形状,可以根据实际使用条件设置为合适的不规则形状。
100.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。