1.本实用新型涉及无人船的技术领域,更具体地说,是涉及一种桅杆设备及无人船。
背景技术:
2.水面无人船是一种高度集成的水面机器人,由于其体量小、功能多和机动灵活,被广泛应用在海洋、河流、湖泊的测量和安防的任务中,可以替代有人船在各种复杂水情下工作。其搭载的设备种类繁多,且经常出现相互干涉等问题,比如雷达组件和摄像头组件都需要安装在无人船的高处,四周尽量无遮挡,因此两者经常会发生相互干涉的问题。为了让雷达和光电摄像头能够360度观察无人船周边的状态,需要对现有常规桅杆进行优化设计。
技术实现要素:
3.本实用新型的目的在于提供一种桅杆设备及无人船,以解决现有技术中存在的无人船的雷达组件和摄像组件相互干涉的技术问题。
4.为实现上述目的,本实用新型采用的技术方案是一种桅杆设备,包括:
5.第一平台;
6.第二平台,位于所述第一平台的下方;
7.摄像组件,设于所述第一平台上;
8.雷达组件,设于所述第二平台上;
9.支撑板,连接所述第一平台和所述第二平台,所述支撑板的长度方向与所述雷达组件的电磁波发射方向平行或者成锐角相交。
10.通过采用上述技术方案,降低了摄像组件和雷达组件相互干涉的程度,摄像组件和雷达组件呈上下布置,摄像组件和雷达组件都可以获取周围环境,相互干涉程度低,同时支撑板的长度方向与雷达组件的电磁波发射方向平行或者成锐角相交,减少了支撑板对电磁波的遮挡,降低了电磁波在传播过程的损耗。
11.在一个实施例中,所述支撑板为透波材料件。
12.具体地,透波材料件为当电磁波通过时损耗和失真不大的两面均具传导性的介质材料。
13.通过采用上述技术方案,提高雷达组件发射电磁波的通过率,降低雷达组件发射的电磁波在传播过程的损耗。
14.在一个实施例中,所述支撑板为玻璃钢。
15.具体地,玻璃钢学名纤维增强塑料,俗称frp(fiber reinforced plastics),微波透过性良好,玻璃钢的透波率可以达到90%-99%。
16.通过采用上述技术方案,提高雷达组件发射电磁波的通过率,降低雷达组件发射的电磁波在传播过程的损耗。
17.在一个实施例中,所述桅杆设备包括至少两个所述支撑板,两个所述支撑板对称设置。
18.优选地,两个支撑板的长度方向均与所述雷达组件的电磁波发射方向平行或者成锐角相交,两个支撑板相互不平行,两个支撑板形成支撑结构。
19.通过采用上述技术方案,两个支撑板形成的支撑结构机械强度高,提高了桅杆设备的稳定性。
20.在一个实施例中,所述支撑板包括第一板体和第二板体,所述第一板体和所述第二板体均连接所述第一平台和所述第二平台,所述第一板体与所述第二板体成钝角相交。
21.通过采用上述技术方案,提高了支撑板的机械强度。
22.在一个实施例中,所述第一板体和所述第二板体为一体成型件。
23.具体地,支撑板可以由板材一体冲压形成。
24.通过采用上述技术方案,简化了加工工序,且提高了支撑板的支撑强度。
25.在一个实施例中,所述桅杆设备还包括天线和倒伏机构,所述天线设于所述倒伏机构上,所述倒伏机构设于所述第一平台上,用于驱使所述天线倒伏和站立。
26.具体地,天线都需要安装在船的高处,以获得良好的接收和发送信号效果,同时在无人船进行陆路运输的时候,无人船的高度又面临公路限高等问题,过高的天线会与公路的限高架碰撞。
27.通过采用上述技术方案,天线在进行公路运输时,可以依靠倒伏机构折叠于第一平台上,避免限高架的影响,提高了无人船的通过率。
28.在一个实施例中,所述桅杆设备还包括设于所述支撑板的靠近所述第二平台的端部的快拆装置。
29.具体地,快拆装置用于连接无人船的船体和支撑板。
30.通过采用上述技术方案,实现了桅杆设备的快拆,以进一步降低无人船的高度,进一步提高了无人船的通过率。
31.在一个实施例中,所述快拆装置包括快拆插头、快拆桅杆座和快拆销,所述快拆插头用于固定于无人船的船体上,所述快拆桅杆座设于所述支撑板上,所述快拆销固定所述快拆插头和所述快拆桅杆座。
32.通过采用上述技术方案,简化了快拆装置的结构,且提高了快拆装置的可靠性。
33.本实施例还提供一种无人船,包括船体和上述的桅杆设备,所述桅杆设备固定于所述船体的顶部。
34.通过采用上述技术方案,降低了摄像组件和雷达组件相互干涉的程度,摄像组件和雷达组件呈上下布置,摄像组件和雷达组件都可以获取周围环境,相互干涉程度低,同时支撑板的长度方向与雷达组件的电磁波发射方向平行或者成锐角相交,减少了支撑板对电磁波的遮挡,降低了电磁波在传播过程的损耗。
35.进一步地,天线竖在无人船的最高点,没有其他设备遮挡,可以有效确保通信距离,同时没有通信死角。摄像组件与天线安装在第一平台,无人船的最高位置,视野开阔能够为远程操控者提供最全面的视觉图像。雷达组件装在位于下方的第二平台,基于雷达组件是平面360
°
旋转扫描,虽然在视觉上支撑板挡住了雷达组件的侧后方,但是雷达组件的电磁波可以穿透玻璃钢材质的支撑板,实现无人船周围360
°
全覆盖扫描。
附图说明
36.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
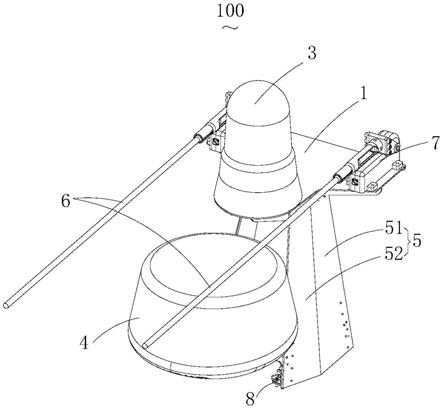
37.图1是本实用新型实施例提供的桅杆设备的一种视角的立体结构图;
38.图2是本实用新型实施例提供的桅杆设备的另一种视角的立体结构图;
39.图3是本实用新型实施例提供的桅杆设备的右视图。
40.图中各附图标记为:
41.100-桅杆设备;
42.1-第一平台;2-第二平台;3-摄像组件;4-雷达组件;5-支撑板;6-天线;7-倒伏机构;8-快拆装置;
43.51-第一板体;52-第二板体;81-快拆插头;82-快拆桅杆座;83-快拆销。
具体实施方式
44.为了使本实用新型所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
45.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接位于另一个元件上或者间接位于另一个元件上。当一个元件被称为“连接于”另一个元件,它可以是直接连接或间接连接至另一个元件。
46.需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型,而不是指示装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
47.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示相对重要性或指示技术特征的数量。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。以下结合具体实施例对本实用新型的具体实现进行更加详细的描述:
48.如图1至图3所示,本实用新型实施例提供的一种桅杆设备100,包括:第一平台1、第二平台2、摄像组件3、雷达组件4和支撑板5;第一平台1和第二平台2呈上下布置;第二平台2位于第一平台1的下方;摄像组件3设于第一平台1上;雷达组件4设于第二平台2上;支撑板5连接第一平台1和第二平台2,支撑板5的长度方向与雷达组件4的电磁波发射方向平行或者成锐角相交。
49.本实施例提供的桅杆设备100的工作原理如下:
50.将桅杆设备100安装于无人船的船体的顶部,第一平台1和第二平台2呈上下布置,摄像组件3设于第一平台1上,摄像组件3可以绕自身轴线转动360
°
,用于拍摄无人船周围的环境图像,雷达组件4设于第二平台2上,雷达组件4可以绕自身轴线转动360
°
,用于发射电磁波探测周围的环境。
51.通过采用上述技术方案,降低了摄像组件3和雷达组件4相互干涉的程度,摄像组
件3和雷达组件4呈上下布置,摄像组件3和雷达组件4都可以获取周围环境,相互干涉程度低,同时支撑板5的长度方向与雷达组件4的电磁波发射方向平行或者成锐角相交,减少了支撑板5对电磁波的遮挡,降低了电磁波在传播过程的损耗。
52.在一个实施例中,支撑板5为透波材料件。
53.具体地,透波材料件为当电磁波通过时损耗和失真不大的两面均具传导性的介质材料。
54.通过采用上述技术方案,提高雷达组件4发射电磁波的通过率,降低雷达组件4发射的电磁波在传播过程的损耗。
55.在一个实施例中,支撑板5为玻璃钢。
56.具体地,玻璃钢学名纤维增强塑料,俗称frp(fiber reinforced plastics),微波透过性良好,玻璃钢的透波率可以达到90%-99%。
57.通过采用上述技术方案,提高雷达组件4发射电磁波的通过率,降低雷达组件4发射的电磁波在传播过程的损耗。
58.在一个实施例中,桅杆设备100包括至少两个支撑板5,两个支撑板5对称设置。
59.优选地,两个支撑板5的长度方向均与雷达组件4的电磁波发射方向平行或者成锐角相交,两个支撑板5相互不平行,两个支撑板5形成支撑结构。
60.通过采用上述技术方案,两个支撑板5形成的支撑结构机械强度高,提高了桅杆设备100的稳定性。
61.在一个实施例中,支撑板5包括第一板体51和第二板体52,第一板体51和第二板体52均连接第一平台1和第二平台2,第一板体51与第二板体52成钝角相交。
62.通过采用上述技术方案,提高了支撑板5的机械强度。
63.在一个实施例中,第一板体51和第二板体52为一体成型件。
64.具体地,支撑板5可以由板材一体冲压形成。
65.通过采用上述技术方案,简化了加工工序,且提高了支撑板5的支撑强度。
66.在一个实施例中,桅杆设备100还包括天线6和倒伏机构7,天线6设于倒伏机构7上,倒伏机构7设于第一平台1上,用于驱使天线6倒伏和站立。
67.具体地,天线6都需要安装在船的高处,以获得良好的接收和发送信号效果,同时在无人船进行陆路运输的时候,无人船的高度又面临公路限高等问题,过高的天线6会与公路的限高架碰撞。
68.通过采用上述技术方案,天线6在进行公路运输时,可以依靠倒伏机构7折叠于第一平台1上,避免限高架的影响,提高了无人船的通过率。
69.在一个实施例中,桅杆设备100还包括设于支撑板5的靠近第二平台2的端部的快拆装置8。
70.具体地,快拆装置8用于连接无人船的船体和支撑板5。
71.通过采用上述技术方案,实现了桅杆设备100的快拆,以进一步降低无人船的高度,进一步提高了无人船的通过率。
72.在一个实施例中,快拆装置8包括快拆插头81、快拆桅杆座82和快拆销83,快拆插头81用于固定于无人船的船体上,快拆桅杆座82设于支撑板5上,快拆销83固定快拆插头81和快拆桅杆座82。
73.通过采用上述技术方案,简化了快拆装置8的结构,且提高了快拆装置8的可靠性。
74.本实施例还提供一种无人船,包括船体和上述的桅杆设备100,桅杆设备100固定于船体的顶部。
75.通过采用上述技术方案,降低了摄像组件3和雷达组件4相互干涉的程度,摄像组件3和雷达组件4呈上下布置,摄像组件3和雷达组件4都可以获取周围环境,相互干涉程度低,同时支撑板5的长度方向与雷达组件4的电磁波发射方向平行或者成锐角相交,减少了支撑板5对电磁波的遮挡,降低了电磁波在传播过程的损耗。
76.进一步地,天线6竖在无人船的最高点,没有其他设备遮挡,可以有效确保通信距离,同时没有通信死角。摄像组件3与天线6安装在第一平台1,无人船的最高位置,视野开阔能够为远程操控者提供最全面的视觉图像。雷达组件4装在位于下方的第二平台2,基于雷达组件4是平面360
°
旋转扫描,虽然在视觉上支撑板5挡住了雷达组件4的侧后方,但是雷达组件4的电磁波可以穿透玻璃钢材质的支撑板5,实现无人船周围360
°
全覆盖扫描。
77.以上仅为本技术的较佳实施例而已,并不用以限制本技术,凡在本技术的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本技术的保护范围之内。