1.本实用新型属于电子技术领域,特别涉及一种利用磁传感器采集转角信号的舵角指示器。
背景技术:
2.舵角指示器是船舶航行的重要设备,通过观察舵叶角度能够准确掌握当前船舶航向状态,在离靠码头与恶劣海况时尤为重要。目前船舶的舵角指示系统多数利用自整角机原理与电位器原理实现舵叶角度采集与舵角值指示,自整角机原理具有工作可靠优点,但是自整角机原理的舵角系统具有功耗大,噪音大,对外接口形式单一,不利于小型化设计以及制造成本高等缺点。电位器原理虽然避免了自整角机功耗大,噪音大,对外接口形式单一,不利于小型化设计以及制造成本高等缺点,但是电位器的使用寿命较短,温漂严重并容易受周围环境的电磁场影响导致信号不稳定。
技术实现要素:
3.本实用新型所要解决的技术问题是提供一种结构简单,工作可靠,使用寿命长的利用磁传感器采集转角信号的舵角指示器。
4.本实用新型的技术方案如下:
5.一种利用磁传感器采集转角信号的舵角指示器,包括壳体,在壳体内的底板上通过圆周均布的多个机芯支柱支撑有控制板,在控制板内侧固定有步进电机,该步进电机为双输出轴电机,其内侧输出轴端设有强磁铁;在步进电机的机壳内侧通过支柱安装有传感器印制板,在传感器印制板上对应强磁铁处设有磁传感器,用于采集步进电机的转角信息;
6.在控制板外侧通过圆周均布的刻度盘支柱安装有刻度盘,所述步进电机的外侧输出轴依次穿过控制板和刻度盘并安装有指针;
7.在控制板上设有控制器和驱动芯片,所述磁传感器的信号输出端与控制器通信连接,用于读取转角值信息;所述控制器通过驱动芯片与步进电机电连接,用于控制步进电机的转动。
8.作为进一步优选,所述步进电机通过刻度盘支柱一端的螺柱固定在控制板内侧。
9.作为进一步优选,所述步进电机的内侧输出轴上固定有安装套,所述强磁铁镶装在安装套内。
10.作为进一步优选,所述底板通过圆周均布的螺钉固定在壳体内底部,以便于拆装。
11.作为进一步优选,在壳体前面通过螺钉连接有密封盖,在密封盖内通过多个压片固定有玻璃板,在玻璃板外缘套设有密封胶圈,以达到防水效果。
12.作为进一步优选,在壳体外缘沿圆周方向均布有紧固支板,紧固支板一端折为u型并通过穿设在所述壳体底面的紧固螺栓与壳体连接,以便于安装。
13.作为进一步优选,在控制板上对应刻度盘的刻度位置设有发光二极管,所述控制器的控制端与发光二极管电连接,用于根据接收到的调光亮度值,控制发光二极管亮度,以
适应环境亮度要求。
14.作为进一步优选,在所述底板上设有接插件,在控制板上还设有电源模块和rs485接口,接插件分别与电源模块和rs485接口电连接,并通过rs485接口与所述控制器的信号输入端连接,用于实时监控rs485接口发送来的舵角值信息。
15.作为进一步优选,所述控制器为stc系列单片机stc8f2k32s2。
16.本实用新型的有益效果是:
17.该舵角指示器通过步进电机带动指针指示舵角值,通过步进电机内端安装的强磁铁与磁传感器保持一定间隙,当步进电机带动强磁铁转动时,使强磁铁与磁传感器发生相对转动;通过控制板上的控制器接收舵角值信息,并读取磁传感器角度信息后与接收舵角值信息进行比较,若两值不同,则通过控制器驱动步进电机转动,同时步进电机带动强磁铁与磁传感器发生相对转动,通过磁传感器输出当前步进电机转过的角度值给控制板,使步进电机控制形成闭环,当两个数值相同时,步进电机停止转动;通过磁传感器与强磁铁非接触相对转动,因此使用寿命长;产生的强磁场近距离作用于磁传感器使周围磁场不会对其产生影响,减少环境干扰,磁传感器转换精度高,不需要齿轮进行变比,减少机械零件,结构简单,工作可靠,便于安装调试。
附图说明
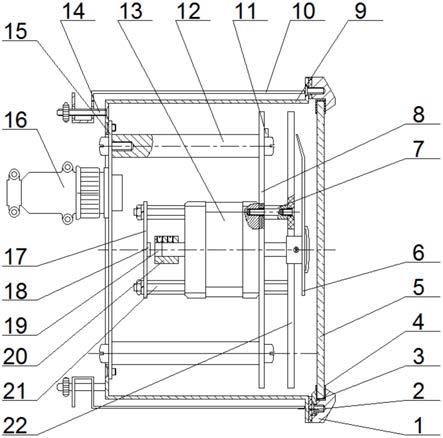
18.图1是本实用新型的结构示意图。
19.图2是本实用新型的右视图。
20.图3是本实用新型的安装示意图。
21.图4是本实用新型的工作原理方框图。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
23.如图1-图4所示,本实用新型涉及的一种利用磁传感器采集转角信号的舵角指示器,包括一个圆筒形壳体9,在壳体9内底部通过圆周均布的螺钉固定有底板15,在底板15上通过圆周均布的多个机芯支柱12和螺钉固定支撑有控制板8,在控制板8内侧固定有步进电机13,该步进电机13为双输出轴电机,其内侧输出轴端通过顶丝固定有安装套20,在安装套20的端口内镶装有强磁铁19;在步进电机13的机壳内侧通过支柱21和螺杆安装有传感器印制板17,在传感器印制板17上对应强磁铁19处设有磁传感器18,磁传感器18靠近强磁铁19,用于采集步进电机13的转角信息。所述磁传感器18采用as5048。
24.在控制板8外侧通过圆周均布的刻度盘支柱7和螺钉安装有刻度盘22,所述步进电机13的外侧输出轴依次穿过控制板8和刻度盘22并安装有指针6。所述步进电机13通过刻度盘支柱7一端的螺柱固定在控制板8内侧。
25.在控制板8上设有控制器和驱动芯片,所述磁传感器18的信号输出端与控制器通信连接,用于读取转角值信息;所述控制器通过驱动芯片与步进电机13的控制输入端电连
接,用于控制步进电机13的转动。所述控制器为stc系列单片机stc8f2k32s2;所述驱动芯片采用细分方式驱动芯片thb6128。
26.在控制板8上对应刻度盘22的刻度位置设有发光二极管11,所述控制器的控制端与发光二极管11电连接,用于根据接收到的调光亮度值,控制发光二极管11亮度,以适应环境亮度要求。
27.在所述底板15上安装有接插件16,在控制板8上还设有电源模块和rs485接口,所述接插件16分别与电源模块和rs485接口电连接,并通过rs485接口与所述控制器的信号输入端连接,用于实时监控rs485接口发送来的舵角值信息。所述电源模块的输出端分别与rs485接口、控制器和磁传感器18电连接,用于提供工作电源。在控制板8上设有零位设定按键,零位设定按键与控制器的输入引脚连接,用于进行该舵角指示器的零位校正。
28.在壳体9前面的卡沿上通过橡胶垫圈2和螺钉连接有密封盖1,在密封盖1内通过多个压片3和螺钉固定有玻璃板5,在玻璃板5外缘套设有密封胶圈4,以达到防水效果。
29.在壳体9外缘沿圆周方向均布有多个紧固支板10,紧固支板10一端折为u型并通过穿设在所述壳体9底面的紧固螺栓14与壳体9连接,以便于安装在驾驶室控制台面板23上,如图3所示。
30.工作时,所述控制器通过rs485接口接收舵角发送器传送的舵角值及调光亮度值。控制器根据接收到的舵角值控制具有细分功能的驱动芯片,控制步进电机13转动,同时将舵角值与磁传感器18输出的转角值进行比较,若结果相同则停止步进电机13转动;控制器根据接收到的调光亮度值,控制发光二极管亮度,以适应环境亮度要求。另外通过该零位设定按键进行舵角指示器的零位校正,即当该舵角指示器接收到舵角值为零时,按下该按键,控制器将控制步进电机13转动,使指针6指示刻度盘22零位位置,并在以后运行时,实时进行偏差修正。
31.尽管本实用新型的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本实用新型的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本实用新型并不限于特定的细节和这里示出与描述的图例。