1.本发明专利涉及一种环境监测潜航器,更具体地说涉及一种多功 能模块化深海环境监测型无人潜航器。
背景技术:
2.随着世界各国对海洋战略地位的重视,环境监测型无人潜航器 (uuv)备受关注。环境监测型无人潜航器是海洋环境监测的关键装备,也是 人类探索海洋的重要工具。对海洋环境的监测在探测海底地形、探寻海底遗 物中起着重要的作用,同时为我国军舰潜艇等军事装备在复杂的海洋环境中 安全运行提供保障。环境监测型 uuv 因活动自由、工作范围广、航行阻力小、 作业功能丰富、制造成本低、震动噪音小等受到各国研究者的重视。
技术实现要素:
3.本发明为环境监测型无人潜航器提供合理方案,对无人潜航器的 结构进行设计。面向我国长时序、多功能、大工作范围的海洋环境监测需求, 设计一种多功能模块化深海环境监测型无人潜航器。本论文重点研究了环境 监测型无人潜航器的总体设计方案和各模块单元设计方案,结合现已有环境 监测功能型无人潜航器的设计方法研究其长续航能力及原理,从运动高效、 监测精确、功能丰富等多方面设计环境监测型无人潜航器。
4.为解决上述设计问题,本发明涉及一种环境监测潜航器,更具体 地说是一种多功能模块化深海环境监测型无人潜航器,包括中间壳,中间壳 中搭载了电池装置,电池壳上方固定连接的微型电机机械控制天线,gps 导航 系统和中心控制装置固定安装在电池壳前方,通信装置固定连接在电池壳下 方,侧扫声纳、陀螺仪、深度计、电子罗盘、充电信息交换装置固定连接在中 间壳上,浅地层剖面仪、多普勒流速仪固定安装在中间壳内部,惯性导航固 定安装在多普勒流速仪上,底部 led 及摄像头固定安装在中心控制系统下方; 艏部和尾部由 o 型圈配合链接,垂推分别固定安装在艏部和尾部的通管中,温度检测装置、前视声纳、前视 led 及摄像头固定安装在艏部壳内,尾推电 池及控制装置固定安装在尾部,尾推螺旋桨安装在推进轴上;其特征在于: 潜航器呈鱼雷形,能安装多种载荷,实现潜航器装载的模块化设计。
5.作为本发明方案的进一步优化,本发明一种环境监测潜航器构型设计所述的天线由微型电机控制其伸出与复位。
6.作为本发明方案的进一步优化,本发明一种环境监测潜航器构型 设计所述的中间壳为圆柱仓,可以实现内部载荷的模块化设计。
7.作为本发明方案的进一步优化,本发明一种环境监测潜航器构型 设计所述的推进转向装置由五个推进装置配合完成系列动作。
8.作为本发明方案的进一步优化,本发明一种环境监测潜航器构型 设计所述的能源与信息互换装置完成潜航器能源的补充和信息的交换。
9.本发明一种环境监测潜航器构型设计,能够实现潜航器水下环境 监测,对海底地
形进行测绘、拍摄,采集水下水文信息等。
附图说明
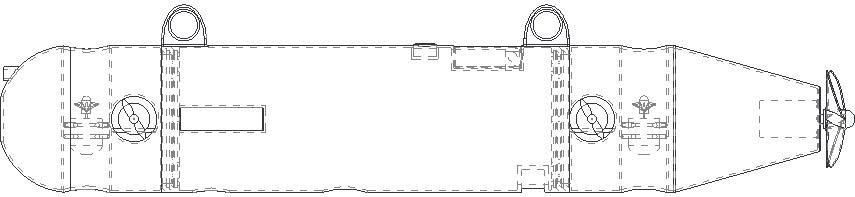
10.图1为本发明多功能模块化深海环境监测型无人潜航器的左视图。
11.图2为本发明多功能模块化深海环境监测型无人潜航器的俯视图。
12.图3为本发明多功能模块化深海环境监测型无人潜航器的内部左视图。
13.图4为本发明多功能模块化深海环境监测型无人潜航器的内部俯视图。
14.图5为本发明多功能模块化深海环境监测型无人潜航器的能源补充与信息交换装置图。
15.图中:温度检测装置(1)、艏部(2)、垂推(3)、吊环(4)、 惯性导航(5)、深度计(6)、中间壳(7)、中心控制装置(8)、gps 导航系统(9)、电子 罗盘(10)、天线(11)、微型电机(12)、尾推电池及控制装置(13)、尾推螺旋 桨(14)、充电信息交换装置(15)、电池装置(16)、通信装置(17)、陀螺仪 (18)、侧扫声纳(19)、底部 led 及摄像头(20)、浅地层剖面仪(21)、多 普勒流速仪(22)、前视声纳(23)、前视 led 及摄像头(24)、充电底座(25)。
具体实施方式
16.以下结合附图对本发明作进一步详细说明。
17.具体实施方式一:下面结合图 1、2、3、4 说明本实施方式,本发明涉及一种环境监 测潜航器,更具体地说是一种多功能模块化深海环境监测型无人潜航器,包 括中间壳 7,中间壳中搭载了电池装置 16,电池壳上方固定连接的微型电机 12 机械控制天线 11,gps 导航系统 9 和中心控制装置 8 固定安装在电池壳前 方,通信装置 17 固定连接在电池壳下方,侧扫声纳 19、陀螺仪 18、深度计 6、电子罗盘 10、充电信息交换装置 15 固定连接在中间壳上,浅地层剖面仪 21、多普勒流速仪 22 固定安装在中间壳内部,惯性导航 5)固定安装在多普 勒流速仪上,底部 led 及摄像头 20 固定安装在中心控制系统下方;艏部 2 和 尾部由 o 型圈配合链接,垂推 3 分别固定安装在艏部和尾部的通管中,温度 检测装置 1、前视声纳 23、前视 led 及摄像头 24 固定安装在艏部壳内,尾推 电池及控制装置 13 固定安装在尾部,尾推螺旋桨 14 安装在推进轴上;能够 实现潜航器水下环境的探测,对海底地形进行测绘与拍摄,高效完成海底环 境监测任务。
18.具体实施方式二:下面结合图 1、2、3、4 说明本实施方式,本实施方式对实施方式 一作进一步说明, 所述的推进装置 13 和垂推 3 能够相互配合,完成五自由 度的自由动作,方便潜航器在水下安全、运动。
19.具体实施方式三:下面结合图 1、2、3、4 说明本实施方式,本实施方式对实施方式 一作进一步说明, 所述的天线 11 和微型电机 12 配合,使天线可以伸出与复 位,方便天线的伸出式设计,减小潜航器高度,能够让潜航器进入更广泛的 海底环境。
20.具体实施方式四:下面结合图 4、5 说明本实施方式,本实施方式对实施方式一作进 一步说明,所述的充电装置 16 即能源补充与信息交换装置在潜航器下端,采 用插拔式充电口与信息交换口与充电底座 25 配合,能够在潜航器不拆卸情况 下进行能源的补充和信息的交换,同时能够在水下能源补给接驳站进行能源 补充和信息交换。
技术特征:
1.一种多功能模块化深海环境监测型无人潜航器,包括中间壳(7),中间壳中搭载了电池装置(16),电池壳上方固定连接的微型电机(12)机械控制天线(11),gps导航系统(9)和中心控制装置(8)固定安装在电池壳前方,通信装置(17)固定连接在电池壳下方,侧扫声纳(19)、陀螺仪(18)、深度计(6)、电子罗盘(10)、充电信息交换装置(15)固定连接在中间壳上,浅地层剖面仪(21)、多普勒流速仪(22)固定安装在中间壳内部,惯性导航(5)固定安装在多普勒流速仪上,底部led及摄像头(20)固定安装在中心控制系统下方;艏部(2)和尾部由o型圈配合链接,垂推(3)分别固定安装在艏部和尾部的通管中,温度检测装置(1)、前视声纳(23)、前视led及摄像头(24)固定安装在艏部壳内,尾推电池及控制装置(13)固定安装在尾部,尾推螺旋桨(14)安装在推进轴上;其特征在于:潜航器呈鱼雷形,能安装多种载荷,实现潜航器装载的模块化设计;潜航器呈三段式分布,中间由卡口连接;天线装置采用伸出式设计;潜航器推进转向装置由一个推进电机螺旋桨和两个垂推、两个侧推装置组成。2.根据权利要求1所述的一种多功能模块化深海环境监测型无人潜航器,其特征在于:所述的天线(11)伸出式设计,采用微型电机(12)控制。3.根据权利要求1所述的一种多功能模块化深海环境监测型无人潜航器,其特征在于:所述的推进转向装置由推进装置和两个垂推两个侧推组成,完成一些列复杂动作。4.根据权利要求1所述的一种多功能模块化深海环境监测型无人潜航器,其特征在于:所述的电池装置(16)电池仓卡扣设计,内部采用模块化电池设计,便于拆卸更换与维修。5.根据权利要求1所述的一种多功能模块化深海环境监测型无人潜航器,其特征在于:所述的侧扫声纳(19)、led及摄像头(20)、浅底层剖面仪(21)配合同时测绘海底地形特征及采集海底图像。6.根据权利要求1所述的一种多功能模块化深海环境监测型无人潜航器,其特征在于:所述的中间仓(7)与艏段(2)、尾段(13)用o型圈卡扣式,增加潜航器密封性。7.根据权利要求书1所述的一种多功能模块化深海环境监测型无人潜航器,其特征在于:所述的能源补充与信息交换装置(16)采用插拔式充电口与信息交换口,能够在潜航器不拆卸情况下进行能源的补充和信息的交换,同时能够在水下能源补给接驳站进行能源补充和信息交换。
技术总结
本发明专利涉及一种环境监测无人潜航器,更具体地说涉及一种多功能模块化深海环境监测型无人潜航器,设计的两个垂推、两个侧推装置能够让潜航器在复杂水下环境完成高难度动作;导航通信系统搭配伸出式天线,保证了潜航器高度不会过高,节省水下空间,增加潜航器水下航行的安全性;能源补充及信息交换装置额能够让潜航器在水下水上进行非拆卸的能源补充与信息交换,节省人力时间;环境监测方面,潜航器艏段安装温度检测装置实时监测海水温度,收集水下水文数据;前视声纳能够探测潜航器前方环境,为潜航器避障策划路线;多波束侧扫声纳配合摄像装置,监测提供海底地形测绘图与摄影图像;浅底层剖面仪测绘地下浅底并作出分析。浅底层剖面仪测绘地下浅底并作出分析。浅底层剖面仪测绘地下浅底并作出分析。
技术研发人员:王佳茂 杨鹏
受保护的技术使用者:海南大学
技术研发日:2021.05.21
技术公布日:2021/12/21