1.本技术涉及水中机械设备领域,尤其涉及一种水下机器人。
背景技术:
2.目前,无人潜航器进行水面回收时,多采用母船释放小艇,通过小艇上的人员携带吊钩(有插销和挂钩两种结构)靠近无人潜航器,人工完成吊钩与无人潜航器上吊点的连接动作,但这种无人潜航器的回收方式受海上风浪影响较大,安全性差、作业效率低。
技术实现要素:
3.基于此,本技术提供了一种水下机器人及回收水中设备的方法,通过水下机器人完成水中设备起吊点的连接,安全可靠,作业效率高。
4.本技术的一个实施例提供一种水下机器人,包括:机器人本体;翻转抱臂,设置于所述机器人本体上,所述翻转抱臂用于夹紧水中设备;机械臂,设置于所述机器人本体上,所述机械臂用于带动第一起吊件连接水中设备上的第二起吊件。
5.根据本技术的一些实施例,所述翻转抱臂包括:上抱臂,通过第一转轴可旋转的设置于所述机器人本体上;下抱臂,通过第二转轴可旋转的设置于所述机器人本体上,所述下抱臂位于所述上抱臂的下方;第一驱动器,带动所述上抱臂旋转;第二驱动器,带动所述下抱臂旋转。
6.根据本技术的一些实施例,所述上抱臂包括第一支撑部和第一弧形部,所述第一支撑部的一端连接所述第一弧形部,所述第一支撑部的另一端连接所述第一转轴;所述下抱臂包括第二支撑部和第二弧形部,所述第二支撑部的一端连接所述第二弧形部,所述第二支撑部的另一端连接所述第二转轴。
7.根据本技术的一些实施例,所述第一支撑部连接所述第一弧形部的一端的侧壁上设置第一卡齿;所述第一弧形部连接所述第一支撑部的一端的侧壁上设置第二卡齿,所述第二卡齿与所述第一卡齿啮合;所述第二支撑部连接所述第二弧形部的一端的侧壁上设置第三卡齿;所述第二弧形部连接所述第二支撑部的一端的侧壁上设置第四卡齿,所述第四卡齿与所述第三卡齿啮合。
8.根据本技术的一些实施例,所述上抱臂的数量为两个,两个所述上抱臂分别位于所述机器人本体的两侧;所述下抱臂的数量为两个,两个所述下抱臂分别位于所述机器人本体的两侧。
9.根据本技术的一些实施例,所述机械臂包括:臂体,所述臂体的第一端连接所述机器人本体;机械手,包括支撑架、第一夹持部、第二夹持部和第三驱动器,所述支撑架设置于所述臂体的第二端,所述第一夹持部和第二夹持部分别与所述支撑架铰接,所述第三驱动器用于带动所述第一夹持部和第二夹持部夹紧第一起吊件;摄像头,设置于所述臂体上。
10.根据本技术的一些实施例,所述第一夹持部和第二夹持部上分别设置与所述第一起吊件对应的夹持槽。
11.根据本技术的一些实施例,所述机械臂还包括旋转驱动组件,所述旋转驱动组件用于带动所述支撑架旋转。
12.本技术的一个实施例提供一种回收水中设备的方法,利用如上所述的水下机器人进行水中设备的回收,所述方法包括:将第一起吊件设置于所述机械臂上;将所述水下机器人放入水中,控制所述水下机器人靠近所述水中设备;翻转水下机器人的翻转抱臂,所述翻转抱臂夹紧所述水中设备;所述机械臂带动第一起吊件连接水中设备上的第二起吊件;所述翻转抱臂松开所述水中设备,起吊所述水中设备。
13.根据本技术的一些实施例,所述翻转水下机器人的翻转抱臂,所述翻转抱臂夹紧所述水中设备包括:所述水下机器人与所述水中设备之间到达预设距离时,上抱臂和下抱臂向前翻转成“八”字状;控制所述水下机器人靠近所述水中设备,继续翻转所述上抱臂和下抱臂,至所述上抱臂与所述水中设备的距离及所述下抱臂与所述水中设备的距离为预设值;观察所述水中设备的第二起吊件的位置,确认所述第二起吊件位于机械臂的工作范围后,所述翻转抱臂夹紧所述水中设备。
14.本技术的水下机器人,进行水中设备的回收时,通过翻转抱臂夹紧所述水中设备,使得水下机器人与水中设备处于相对静止的状态,通过机械臂带动第一起吊件连接水中设备的第二起吊件,实现水中设备起吊件的无人接触式连接,从而避免人员下水操作带来的意外风险,安全可靠,作业效率高。
附图说明
15.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图,而并不超出本技术要求保护的范围。
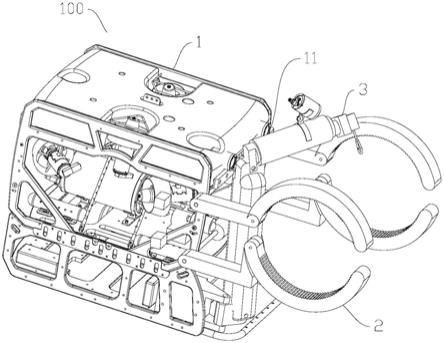
16.图1是本技术实施例水下机器人的示意图;
17.图2是本技术实施例水下机器人抱紧水中设备的示意图;
18.图3是本技术实施例第一起吊件连接第二起吊件的示意图;
19.图4是本技术实施例上抱臂和下抱臂的示意图;
20.图5是本技术实施例上抱臂和下抱臂后翻过程的示意图;
21.图6是本技术实施例上抱臂的爆炸图;
22.图7是本技术实施例下抱臂的示意图;
23.图8是本技术实施例机械臂的示意图;
24.图9是本技术实施例机械手的示意图;
25.图10是本技术实施例机械手的剖视图;
26.图11是本技术实施例第一夹持部连接支撑部的示意图;
27.图12是本技术实施例机械手的驱动结构示意图;
28.图13是本技术实施例推力块的示意图;
29.图14是本技术实施例传动块的示意图;
30.图15是本技术实施例支撑架的示意图;
31.图16是本技术实施例导向套的示意图;
32.图17是本技术实施例第一起吊件的示意图。
具体实施方式
33.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
34.如图1、图2和图3所示,本实施例提供一种水下机器人100。水下机器人100包括机器人本体1、翻转抱臂2和机械臂3,翻转抱臂2和机械臂3均设置于机器人本体1上。
35.本实施例的机器人本体1选择已有的机器人本体,使得水下机器人100可在水中移动并进行作业。操作人员可在母船上通过遥控对水中的水下机器人100进行控制。可选地,在机器人本体1的前端设置前端摄像头11,以便于操作人员观察水中的情况。
36.翻转抱臂2设置于机器人本体1上,翻转抱臂2连接机器人本体1上的控制单元(如处理器),使得操作人员可通过遥控对翻转抱臂2进行控制。翻转抱臂2向前翻转,可用于在水中夹紧水中设备200。即使在风量较大的情况下,通过翻转抱臂2夹紧水中设备200,可保证水下机器人100与水中设备200的相对静止。本实施例的水中设备200为无人潜航器。
37.机械臂3设置于机器人本体1的前端,机械臂3连接机器人本体1上的控制单元(如处理器),使得操作人员可通过遥控对机械臂3进行控制。机械臂3上夹持有第一起吊件101,本实施例的第一起吊件101为吊钩。水中设备200上设有第二起吊件201,本实施例的第二起吊件201为吊环。机械臂3带动第一起吊件101移动,并将第一起吊件101连接在水中设备上的第二起吊件201上,实现水中设备200的起吊连接。
38.本技术通过翻转抱臂2的翻转可实现对水中设备200的夹紧及松开,翻转抱臂2夹紧水中设备200时,水下机器人100与水中设备200相对静止,避免风浪对起吊件连接的影响。机械臂3带动第一起吊件101移动,实现第一起吊件101和第二起吊件201的连接。操作人员通过控制水下机器人100完成起吊件的连接,避免风浪对人员安全的影响,作业效率高。
39.如图4和图5所示,根据本技术一个可选的技术方案,翻转抱臂2包括:上抱臂21、第一驱动器23、下抱臂25和第二驱动器27。本实施例的第一驱动器23和第二驱动器27均为电机。
40.上抱臂21通过第一转轴22可旋转的设置于机器人本体1上。第一转轴22通过传动结构连接第一驱动器23,第一转轴22和第一驱动器23之间的传动结构为已有的传动结构。第一驱动器23通过第一转轴22带动上抱臂21翻转,第一驱动器23正转时带动上抱臂21前翻,第一驱动器23反转时带动上抱臂21后翻。本实施例在机器人本体1上设置第一挡块24,上抱臂21后翻到位时,上抱臂21紧贴第一挡块24。
41.下抱臂25通过第二转轴26可旋转的设置于机器人本体1上,下抱臂25位于上抱臂21的下方。第二转轴26通过传动结构连接第二驱动器27,第二转轴26和第二驱动器27之间的传动结构为已有的传动结构。第二驱动器27通过第二转轴26带动下抱臂25翻转,第二驱动器27正转时带动下抱臂25前翻,第二驱动器27反转时带动下抱臂25后翻。本实施例在机器人本体1上设置第二挡块28,下抱臂25后翻到位时,下抱臂25紧贴第二挡块28。
42.上抱臂21和下抱臂25前翻时,上抱臂21和下抱臂25配合夹紧水中设备200。上抱臂
21和下抱臂25后翻时,松开水中设备200。
43.如图6所示,根据本技术一个可选的技术方案,上抱臂21包括第一支撑部211和第一弧形部212。本实施例的第一支撑部211为“一”字形,第一弧形部212为弧形。第一弧形部212的内壁直径与水中设备200的外径相配合。第一支撑部211的一端设置连接孔2114,第一弧形部212的一端设置连接孔2124,通过螺栓穿过连接孔2114和连接孔2124实现第一支撑部211和第一弧形部212的固定连接。第一支撑部211的另一端设置连接孔2111,第一支撑部211通过连接孔2111连接第一转轴22。
44.如图7所示,下抱臂25包括第二支撑部251和第二弧形部252。本实施例的第二支撑部251为“l”形,第二弧形部252为弧形。第二弧形部252的内壁直径与水中设备200的外径相配合。第二支撑部251的一端设置连接孔2512,第二弧形部252的一端设置连接孔2522,通过螺栓穿过连接孔2512和连接孔2522实现第二支撑部251和第二弧形部252的连接。第二支撑部251的另一端设置连接孔2511,第二支撑部251通过连接孔2511连接第二转轴26。第一弧形部212由上方紧贴水中设备200,第二弧形部252由下方紧贴水中设备200,第一弧形部212和第二弧形部252配合将水中设备200夹紧。可选地,在第一弧形部212的内壁2121和第二弧形部252的内壁2521上设置防滑橡胶条,提高防滑效果的同时避免第一弧形部212和第二弧形部252划伤水中设备200。
45.根据本技术一个可选的技术方案,第一支撑部211连接第一弧形部212的一端包括第一凸面2112和第一凹面2113,第一凸面2112和第一凹面2113之间的侧壁上设置第一卡齿2115。本实施例的多个第一卡齿2115绕连接孔2114的轴线周向均布。第一弧形部212连接第一支撑部211的一端包括第二凸面2122和第二凹面2123,第二凸面2122和第二凹面2123之间的侧壁上设置第二卡齿2125。本实施例的第二卡齿2125绕连接孔2124的轴线周向均布。第一凸面2112和第二凹面2123配合,第一凹面2113和第二凸面2122配合。第一卡齿2115和第二卡齿2125啮合,便于对第一弧形部212相对第一支撑部211的角度进行微调,使得第一弧形部212可以更好的贴合水中设备。
46.第二支撑部251连接第二弧形部252的一端的侧壁上设置第三卡齿2513,多个第三卡齿2513绕连接孔2512的轴线周向均布。第二弧形部252连接第二支撑部251的一端的侧壁上设置第四卡齿2523,多个第四卡齿2523绕连接孔2522的轴线周向均布。第四卡齿2523与第三卡齿2513啮合,以便调整第二弧形部252相对第二支撑部251的角度。
47.根据本技术一个可选的技术方案,上抱臂21的数量为两个,两个上抱臂21分别设置于第一转轴22的两端,以使两个上抱臂21分别位于机器人本体1的两侧。下抱臂25的数量为两个,两个下抱臂25分别设置于第二转轴26的两端,以使两个下抱臂22分别位于机器人本体1的两侧。机器人本体1两侧的上抱臂21和下抱臂25分别配合,实现对水中设备200的两个位置的夹紧,保证水下机器人100与水中设备200相对静止。
48.如图8所示,根据本技术一个可选的技术方案,机械臂3包括:臂体31、机械手32和摄像头33。机械手32和摄像头33均设置于臂体31上。
49.本技术的臂体31设置于机器人本体1的前端。臂体31包括臂体前段311、臂体中段312、臂体后段313和固定座314。臂体前段311与臂体中段312铰接,臂体中段312与臂体后段313铰接,臂体后段313和固定座314铰接,固定座314的一端作为臂体31的第一端连接机器人本体1。本实施例的臂体31为已有结构,可实现多自由度的运动。
50.如图9、图10、图11和图12所示,本技术的机械手32包括支撑架321、第一夹持部322、第二夹持部323和第三驱动器324。支撑架321设置于臂体31的第二端,即支撑架321设置于臂体前段311上。第一夹持部322和第二夹持部323分别与支撑架321铰接。第三驱动器324用于带动第一夹持部322和第二夹持部323夹紧第一起吊件101。第一夹持部322和第二夹持部323闭合可夹紧第一起吊件101,第一夹持部322和第二夹持部323分离可松开第一起吊件101。
51.如图13所示,一种可选的方案中,推力块325包括沉孔3251和位于沉孔3251两侧的第一轴孔3252及第二轴孔3253,沉孔3251的轴线与第一轴孔3252的轴线及第二轴孔3253的轴线垂直。
52.如图14所示,传动块326包括第三轴孔3261和第四轴孔3262,第三轴孔3261的轴线和第四轴孔3262的轴线平行。
53.如图11所示,第一夹持部322通过第一轴3223与支撑架321铰接。第二轴3222穿过传动块326的第四轴孔3262和第一夹持部322上的轴孔,实现传动块326和第一夹持部322的铰接。第三轴3263穿过推力块325的第一轴孔3252及传动块326的第三轴孔3261,实现推力块325与传动块326的铰接。推力块325向前端或后端移动时带动第一夹持部322绕第一轴3223摆动。
54.第二夹持部323与支撑架321及另一传动块326的铰接方式和第一夹持部322的铰接方式相同。另一传动块326通过第二轴孔3253与推力块325铰接。推力块325向后端移动时第一夹持部322和第二夹持部323相互靠近,闭合后用于夹持第一起吊件101。推力块325向前端移动时第一夹持部322和第二夹持部323相互远离,分离后用于松开第一起吊件101。
55.如图15和图16所示,支撑架321包括通孔3211。第三驱动器324设置于臂体前段311的空腔内。本实施例的第三驱动器324为电机。第三驱动器324的输出轴连接丝杠3241。螺母3242的一端与丝杠3241螺纹连接,另一端穿入过渡套3243中,通过螺钉将螺母3242与过渡套3243固定。臂体前段311的空腔内固定设置导向套3246,导向套3246的侧壁上设置导向槽32461,过渡套3243设置于导向套3246内,螺母3242与过渡套3243的连接螺钉的螺帽位于导向槽32461内,以使过渡套3243可滑动但不能转动。拉杆3244的一端可旋转的设置于过渡套3243中,且拉杆3244的端部设置凸缘,凸缘将拉杆3244的端部限制在所述过渡套3243内,拉杆3244的另一端穿过支撑架321的通孔3211。通过螺钉将推力块325与拉杆3244连接。
56.第三驱动器324正转时,利用丝杠3241和螺母3242的螺纹配合,螺母3242推动过渡套3243和拉杆3244前移。第三驱动器324反转时,螺母3242通过过渡套3243带动过拉杆3244后移。拉杆3244带动推力块325前后移动,实现第一夹持部322和第二夹持部323的分离及闭合。
57.可选地,支撑架321的通孔3211内设置无滚珠的自润滑轴承3245,拉杆3244穿过自润滑轴承3245,便于拉杆3244相对支撑架321滑动。
58.摄像头33设置于臂体31的臂体前段311上。操作人员可通过摄像头33观察机械手32夹持的第一起吊件101的位置。
59.如图11和图17所示,根据本技术一个可选的技术方案,第一起吊件101的末端为十字型。第一夹持部322和第二夹持部323上分别设置与第一起吊件101对应的十字型的夹持槽3221。第一夹持部322和第二夹持部323闭合时,第一夹持部322和第二夹持部323上的夹
持槽3221形成的空腔正好与第一起吊件101的十字型末端契合,确保机械手32闭合后能够牢牢地抓握住第一起吊件101,保证第一起吊件101连接第二起吊件201时动作稳定可靠,避免第一起吊件101在机械手32的夹持下产生歪斜和滑脱。
60.根据本技术一个可选的技术方案,机械臂3还包括旋转驱动组件34。旋转驱动组件34用于带动支撑架321旋转。
61.可选地,旋转驱动组件34包括第四驱动器341、第一齿轮342和第二齿轮343。第四驱动器341为电机,设置于臂体前段311的空腔内。第一齿轮342连接第四驱动器341的输出轴,第二齿轮343与第一齿轮342啮合。
62.机械手32还包括齿轮箱壳327和支撑架轴承328。齿轮箱壳32通过螺栓连接臂体前段311的端面。支撑架轴承328设置于齿轮箱壳327的空腔内,支撑架321的一端穿过支撑架轴承328进入齿轮箱壳327的空腔内。支撑架321的外壁上设置键槽3212,键槽3212内设置键,第二齿轮343通过键连接支撑架321。第四驱动器341通过第一齿轮342和第二齿轮343带动支撑架321旋转,从而带动第一夹持部322和第二夹持部323跟随旋转,以调整第一起吊件101的角度,便于第一起吊件101连接第二起吊件201。支撑架321旋转时,推力块325和拉杆3244跟随旋转。
63.本实施例提供一种回收水中设备的方法,利用如上的水下机器人进行水中设备的回收,方法包括:
64.s1、将第一起吊件设置于机械臂上;
65.s2、将水下机器人放入水中,控制水下机器人靠近水中设备;
66.s3、向前翻转水下机器人的翻转抱臂,翻转抱臂夹紧水中设备;
67.s4、机械臂带动第一起吊件连接水中设备上的第二起吊件;
68.s5、翻转抱臂松开水中设备,通过母船上的起吊设备起吊水中设备。
69.根据本技术一个可选的技术方案,翻转水下机器人的翻转抱臂,翻转抱臂夹紧水中设备包括:
70.水下机器人与水中设备之间到达预设距离时,上抱臂和下抱臂向前翻转成“八”字状,预设距离可根据实际需求设置;
71.控制水下机器人靠近水中设备,继续翻转上抱臂和下抱臂,至上抱臂与水中设备的距离及下抱臂与水中设备的距离为预设值,本实施例设置的预设值为10~20cm,以使翻转抱臂大致环抱水中设备;
72.观察水中设备的第二起吊件的位置,确认第二起吊件位于机械臂的工作范围后,翻转抱臂夹紧水中设备。
73.本技术的水下机器人,进行水中设备的回收时,通过翻转抱臂夹紧水中设备,通过机械臂带动第一起吊件连接水中设备的第二起吊件,实现水中设备起吊件的无人接触式连接,即使在风浪较大的情况下也能可靠的实现水中设备的起吊连接。
74.以上对本技术实施例进行了详细介绍,本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明仅用于帮助理解本技术的方法及其核心思想。同时,本领域技术人员依据本技术的思想,基于本技术的具体实施方式及应用范围上做出的改变或变形之处,都属于本技术保护的范围。综上所述,本说明书内容不应理解为对本技术的限制。