1.本发明涉及潜航器回收技术领域,具体为一种水下潜航器自主回收装置及其回收方法。
背景技术:
2.水下潜航器可以代替潜水员进行沉船打捞、深水勘探以及水下电缆铺设灯作业,水下潜航器在回收的过程中一般通过牵引机构对其进行导向回收,而水下的水流动方向无法保持,在回收过程中潜航器容易因水流的推动产生一定的偏转,导致潜航器无法直接进入回收架内,需要进行繁琐的测定转向保证潜航器与回收架对应,因此,针对上述问题提出一种水下潜航器自主回收装置及其回收方法。
技术实现要素:
3.本发明的目的在于提供一种水下潜航器自主回收装置及其回收方法,以解决上述背景技术中提出的问题。
4.为实现上述目的,本发明提供如下技术方案:一种水下潜航器自主回收装置及其回收方法,包括回收船、潜航器主体和回收架,所述回收船的底端固定连接有回收架,通过回收架对潜航器主体进行回收后的放置,所述回收架的内侧滑动连接有液压升降杆,所述液压升降杆的内侧设置有电源线,通过电源线对牵引模块内进行供电,所述液压升降杆的底端固定连接有牵引模块,通过液压升降杆带动牵引模块上下运动,所述牵引模块的底端面固定连接有定位信号发射组件,通过定位信号发射组件发射定位信号,进行定位,所述潜航器主体的顶端内侧设置有缓冲模块,所述缓冲模块的顶端内侧转动连接有定位信号接收模块,所述定位信号接收模块的左端与右端均固定连接有变向受力组件。
5.进一步的,所述牵引模块的内侧转动连接有连接传动杆,所述连接传动杆的两端均固定连接有变向调板,通过连接传动杆将变向调板带动,所述变向调板的底端内侧固定连接有凸起组件,所述牵引模块的内侧滑动连接有方形框,所述方形框的外侧滑动连接有限位滑槽,所述限位滑槽与连接传动杆固定连接,通过限位滑槽使方形框在滑动后带动连接传动杆带动。
6.进一步的,所述牵引模块的内侧固定连接有第一电机,所述第一电机的主轴末端固定连接有第一螺杆,所述第一螺杆螺纹旋合连接于方形框的内侧,通过第一螺杆的转动带动方形框沿着第一螺杆的方向运动。
7.进一步的,所述缓冲模块与定位信号接收模块之间设置有阻尼轴承,通过阻尼轴承避免缓冲模块内进入水源,所述缓冲模块的左端内侧固定连接有高频电磁波发射模块,以缓冲模块的中线对称发射两组相同强度高频电磁波,所述缓冲模块的内侧转动连接有转动圆盘,所述定位信号接收模块与转动圆盘之间固定连接有偏移定位板,通过转动圆盘的转动方便偏移定位板运动,所述偏移定位板的左端内侧固定连接有电磁波接收模块,对高频电磁波进行接收。
8.进一步的,所述缓冲模块的右端内侧滑动连接有传动拉板,所述传动拉板的左端内侧转动连接有定位插杆,所述定位插杆滑动连接于偏移定位板的内侧,通过定位插杆使传动拉板将偏移定位板拉动。
9.进一步的,所述传动拉板的右端内侧穿设有第二螺杆,所述第二螺杆转动连接于缓冲模块内侧,所述第二螺杆的外侧螺纹旋合连接有滑动挡板,第二螺杆的转动带动滑动挡板运动,使其沿着第二螺杆的方向在缓冲模块的内侧滑动,所述第二螺杆的外侧设置有复位弹簧,所述复位弹簧固定连接于传动拉板与滑动挡板之间,复位弹簧的弹力将传动拉板带动。
10.进一步的,所述缓冲模块的右端内侧固定连接有第二电机,所述第二电机的主轴末端与第二螺杆的右端均固定连接有传动齿轮,所述传动齿轮相互啮合,通过传动齿轮使两个第二螺杆同时转动。
11.进一步的,所述潜航器主体的顶端固定连接有水下阻力检测模块,对在水下的潜航器主体所受的的水下阻力进行检测,所述潜航器主体的底端固定连接有桨叶推动器,方便将潜航器主体进行变向。
12.进一步的,一种水下潜航器自主回收装置的回收方法如下:
13.步骤一,定位信号发射组件向下方发射定位信号,定位信号接收模块对定位信号进行接收,通过潜航器主体后方的推进器将潜航器主体导航至牵引模块的下方;
14.步骤二,液压升降杆伸长带动牵引模块位于变向受力组件的外侧,启动第一电机带动第一螺杆转动,第一螺杆带动方形框滑动,方形框通过限位滑槽带动连接传动杆运动,连接传动杆使变向调板对变向受力组件夹持;
15.步骤三,高频电磁波发射模块发射高频电磁波,电磁波接收模块对电磁波接收,启动第二电机使传动齿轮转动,使第二螺杆一同转动,且带动滑动挡板滑动,将复位弹簧进行弹力调节,启动潜航器主体底端的桨叶推动器将潜航器主体进行转向。
16.与现有技术相比,本发明通过定位信号发射组件与定位信号接收模块进行潜航器主体与牵引模块之间的定位,通过变向调板对变向受力组件夹持,使变向受力组件进行变向,使其与回收架的方向对应,在水下的外部作用力可以忽略时,通过阻尼轴承的摩擦力,带动潜航器主体运动,将潜航器主体与回收架对应,方便潜航器主体被回收架回收。
17.与现有技术相比,本发明通过定位信号接收模块在缓冲模块内的转动,在水下水源的流动会产生推力,带动潜航器主体自身发生偏斜转向,避免构件刚性损伤,通过第二螺杆的转动,使前后两侧的滑动挡板以相反的方向滑动,对复位弹簧进行弹力调节,并通过桨叶推动器,使潜航器主体在受到水下的水流作用力时更快速的与回收架对应。
附图说明
18.为了更清楚地说明本发明的技术方案,下面将对本发明技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
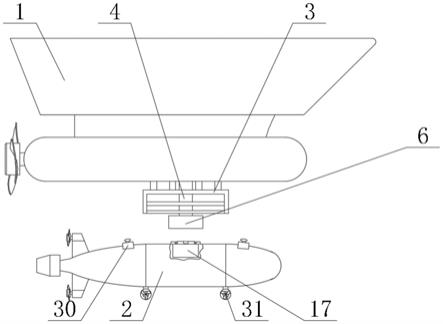
19.图1为本发明的整体结构示意图。
20.图2为本发明牵引模块的结构示意图。
21.图3为本发明牵引模块的内部结构示意图。
22.图4为本发明牵引模块的俯剖结构示意图。
23.图5为本发明连接传动杆的安装结构示意图。
24.图6为本发明方形框的结构示意图。
25.图7为本发明缓冲模块的内部结构示意图。
26.图8为本发明缓冲模块的俯剖示意图。
27.图9为本发明图8的a处结构示意图。
28.图中:1、回收船;2、潜航器主体;3、回收架;4、液压升降杆;5、电源线;6、牵引模块;7、变向调板;8、凸起组件;9、定位信号发射组件;10、连接传动杆;11、限位滑槽;12、方形框;13、第一电机;14、第一螺杆;15、定位信号接收模块;16、变向受力组件;17、缓冲模块;18、阻尼轴承;19、偏移定位板;20、转动圆盘;21、高频电磁波发射模块;22、电磁波接收模块;23、传动拉板;24、定位插杆;25、复位弹簧;26、滑动挡板;27、第二螺杆;28、传动齿轮;29、第二电机;30、水下阻力检测模块;31、桨叶推动器。
具体实施方式
29.下面结合具体实施方式对本发明作进一步的说明,基于本发明中的具体实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他具体实施方式,都属于本发明保护的范围。
30.实施例1
31.请参阅图1
‑
9,本发明提供了一种水下潜航器自主回收装置及其回收方法,其包括回收船(1)、潜航器主体(2)和回收架(3),所述回收船(1)的底端固定连接有回收架(3),通过回收架(3)对潜航器主体(2)进行回收后的放置,所述回收架(3)的内侧滑动连接有液压升降杆(4),所述液压升降杆(4)的内侧设置有电源线(5),通过电源线(5)对牵引模块(6)内进行供电,所述液压升降杆(4)的底端固定连接有牵引模块(6),通过液压升降杆(4)带动牵引模块(6)上下运动,所述牵引模块(6)的底端面固定连接有定位信号发射组件(9),通过定位信号发射组件(9)发射定位信号,进行定位,所述潜航器主体(2)的顶端内侧设置有缓冲模块(17),所述缓冲模块(17)的顶端内侧转动连接有定位信号接收模块(15),所述定位信号接收模块(15)的左端与右端均固定连接有变向受力组件(16)
32.具体的,所述牵引模块(6)的内侧转动连接有连接传动杆(10),所述连接传动杆(10)的两端均固定连接有变向调板(7),通过连接传动杆(10)将变向调板(7)带动,所述变向调板(7)的底端内侧固定连接有凸起组件(8),所述牵引模块(6)的内侧滑动连接有方形框(12),所述方形框(12)的外侧滑动连接有限位滑槽(11),所述限位滑槽(11)与连接传动杆(10)固定连接,通过限位滑槽(11)使方形框(12)在滑动后带动连接传动杆(10)带动。
33.具体的,所述牵引模块(6)的内侧固定连接有第一电机(13),所述第一电机(13)的主轴末端固定连接有第一螺杆(14),所述第一螺杆(14)螺纹旋合连接于方形框(12)的内侧,通过第一螺杆(14)的转动带动方形框(12)沿着第一螺杆(14)的方向运动。
34.具体的,所述缓冲模块(17)与定位信号接收模块(15)之间设置有阻尼轴承(18),通过阻尼轴承(18)避免缓冲模块(17)内进入水源,所述缓冲模块(17)的左端内侧固定连接有高频电磁波发射模块(21),以缓冲模块(17)的中线对称发射两组相同强度高频电磁波,
所述缓冲模块(17)的内侧转动连接有转动圆盘(20),所述定位信号接收模块(15)与转动圆盘(20)之间固定连接有偏移定位板(19),通过转动圆盘(20)的转动方便偏移定位板(19)运动,所述偏移定位板(19)的左端内侧固定连接有电磁波接收模块(22),对高频电磁波进行接收。
35.具体的,所述缓冲模块(17)的右端内侧滑动连接有传动拉板(23),所述传动拉板(23)的左端内侧转动连接有定位插杆(24),所述定位插杆(24)滑动连接于偏移定位板(19)的内侧,通过定位插杆(24)使传动拉板(23)将偏移定位板(19)拉动。
36.具体的,所述传动拉板(23)的右端内侧穿设有第二螺杆(27),所述第二螺杆(27)转动连接于缓冲模块(17)内侧,所述第二螺杆(27)的外侧螺纹旋合连接有滑动挡板(26),第二螺杆(27)的转动带动滑动挡板(26)运动,使其沿着第二螺杆(27)的方向在缓冲模块(17)的内侧滑动,所述第二螺杆(27)的外侧设置有复位弹簧(25),所述复位弹簧(25)固定连接于传动拉板(23)与滑动挡板(26)之间,复位弹簧(25)的弹力将传动拉板(23)带动。
37.具体的,所述缓冲模块(17)的右端内侧固定连接有第二电机(29),所述第二电机(29)的主轴末端与第二螺杆(27)的右端均固定连接有传动齿轮(28),所述传动齿轮(28)相互啮合,通过传动齿轮(28)使两个第二螺杆(27)同时转动。
38.具体的,所述潜航器主体(2)的顶端固定连接有水下阻力检测模块(30),对在水下的潜航器主体(2)所受的的水下阻力进行检测,所述潜航器主体(2)的底端固定连接有桨叶推动器(31),方便将潜航器主体(2)进行变向。
39.通过采用上述技术方案:本发明中,通过定位信号发射组件(9)与定位信号接收模块(15)进行潜航器主体(2)与牵引模块(6)之间的定位,通过变向调板(7)对变向受力组件(16)夹持,使变向受力组件(16)进行变向,使其与回收架(3)的方向对应,在水下的外部作用力可以忽略时,通过阻尼轴承(18)的摩擦力,带动潜航器主体(2)运动,将潜航器主体(2)与回收架(3)对应,方便潜航器主体(2)被回收架(3)回收;本发明中,通过定位信号接收模块(15)在缓冲模块(17)内的转动,在水下水源的流动会产生推力,带动潜航器主体(2)自身发生偏斜转向,避免构件刚性损伤,通过第二螺杆(27)的转动,使前后两侧的滑动挡板(26)以相反的方向滑动,对复位弹簧(25)进行弹力调节,并通过桨叶推动器(31),使潜航器主体(2)在受到水下的水流作用力时更快速的与回收架(3)对应。
40.需要说明的是,本发明提供的一种水下潜航器自主回收装置的回收方法如下:定位信号发射组件(9)向下方发射定位信号,定位信号接收模块(15)对定位信号进行接收,通过潜航器主体(2)后方的推进器将潜航器主体(2)导航,直至定位信号接收模块(15)位于至牵引模块(6)的下方,首先启动第一电机(13)带动第一螺杆(14)转动,第一螺杆(14)通过与方形框(12)的螺纹旋合连接,带动方形框(12)在牵引模块(6)的内侧滑,使左右两侧的方形框(12)相互靠近,方形框(12)在限位滑槽(11)内侧滑动,并通过限位滑槽(11)带动连接传动杆(10)运动,液压升降杆(4)带动牵引模块(6)向下滑动,使变向受力组件(16)被牵引模块(6)覆盖,再次启动第一电机(13)并带动第一螺杆(14)反向转动,方形框(12)会相互远离,并通过限位滑槽(11)带动连接传动杆(10)运动,连接传动杆(10)使变向调板(7)对变向受力组件(16)夹持,夹持过程中通过凸起组件(8)插入变向受力组件(16)内,避免变向受力组件(16)从牵引模块(6)内侧脱落,在水下水源的流动会产生推力,带动潜航器主体(2)自身发生偏斜转向,通过定位信号接收模块(15)在缓冲模块(17)内的转动,避免构件刚性损
伤,高频电磁波发射模块(21)会以缓冲模块(17)的中线位置为中心,发射前后对称的两组相同强度的高频电磁波,电磁波接收模块(22)对电磁波接收,通过对两组电磁波强度的感应差值,可以得出定位信号接收模块(15)与缓冲模块(17)之间的转动偏移方向,复位弹簧(25)的弹力对传动拉板(23)施加作用力,使传动拉板(23)可以带动偏移定位板(19)逐渐与高频电磁波相互垂直,使电磁波接收模块(22)接收的电磁波强度相同,使定位信号接收模块(15)与缓冲模块(17)之间转动复位,实现潜航器主体(2)与回收架(3)的对应,启动第二电机(29)使传动齿轮(28)转动,传动齿轮(28)的相互啮合带动第二螺杆(27)一同转动,第二螺杆(27)的对称设置使前后两侧的滑动挡板(26)以相反的方向滑动,对复位弹簧(25)进行弹力调节,启动潜航器主体(2)底端的桨叶推动器(31),根据两组电磁波强度的感应差值将潜航器主体(2)进行转向,使潜航器主体(2)在受到水下的水流作用力时更快速的与回收架(3)对应。
41.实施例2
42.请参阅图1
‑
6,本发明提供了一种水下潜航器自主回收装置及其回收方法,其包括回收船(1)、潜航器主体(2)和回收架(3),所述回收船(1)的底端固定连接有回收架(3),通过回收架(3)对潜航器主体(2)进行回收后的放置,所述回收架(3)的内侧滑动连接有液压升降杆(4),所述液压升降杆(4)的内侧设置有电源线(5),通过电源线(5)对牵引模块(6)内进行供电,所述液压升降杆(4)的底端固定连接有牵引模块(6),通过液压升降杆(4)带动牵引模块(6)上下运动,所述牵引模块(6)的底端面固定连接有定位信号发射组件(9),通过定位信号发射组件(9)发射定位信号,进行定位,所述潜航器主体(2)的顶端内侧设置有缓冲模块(17),所述缓冲模块(17)的顶端内侧转动连接有定位信号接收模块(15),所述定位信号接收模块(15)的左端与右端均固定连接有变向受力组件(16)
43.具体的,所述牵引模块(6)的内侧转动连接有连接传动杆(10),所述连接传动杆(10)的两端均固定连接有变向调板(7),通过连接传动杆(10)将变向调板(7)带动,所述变向调板(7)的底端内侧固定连接有凸起组件(8),所述牵引模块(6)的内侧滑动连接有方形框(12),所述方形框(12)的外侧滑动连接有限位滑槽(11),所述限位滑槽(11)与连接传动杆(10)固定连接,通过限位滑槽(11)使方形框(12)在滑动后带动连接传动杆(10)带动。
44.具体的,所述牵引模块(6)的内侧固定连接有第一电机(13),所述第一电机(13)的主轴末端固定连接有第一螺杆(14),所述第一螺杆(14)螺纹旋合连接于方形框(12)的内侧,通过第一螺杆(14)的转动带动方形框(12)沿着第一螺杆(14)的方向运动。
45.通过采用上述技术方案:本发明中,通过定位信号发射组件(9)与定位信号接收模块(15)进行潜航器主体(2)与牵引模块(6)之间的定位,通过变向调板(7)对变向受力组件(16)夹持,使变向受力组件(16)进行变向,使其与回收架(3)的方向对应,在水下的外部作用力可以忽略时,通过阻尼轴承(18)的摩擦力,带动潜航器主体(2)运动,将潜航器主体(2)与回收架(3)对应,方便潜航器主体(2)被回收架(3)回收。
46.实施例3
47.请参阅图7
‑
9,本发明提供了一种水下潜航器自主回收装置及其回收方法,其包括回收船(1)、潜航器主体(2)和回收架(3),所述潜航器主体(2)的顶端内侧设置有缓冲模块(17),所述缓冲模块(17)的顶端内侧转动连接有定位信号接收模块(15),所述定位信号接收模块(15)的左端与右端均固定连接有变向受力组件(16)
48.具体的,所述缓冲模块(17)与定位信号接收模块(15)之间设置有阻尼轴承(18),通过阻尼轴承(18)避免缓冲模块(17)内进入水源,所述缓冲模块(17)的左端内侧固定连接有高频电磁波发射模块(21),以缓冲模块(17)的中线对称发射两组相同强度高频电磁波,所述缓冲模块(17)的内侧转动连接有转动圆盘(20),所述定位信号接收模块(15)与转动圆盘(20)之间固定连接有偏移定位板(19),通过转动圆盘(20)的转动方便偏移定位板(19)运动,所述偏移定位板(19)的左端内侧固定连接有电磁波接收模块(22),对高频电磁波进行接收。
49.具体的,所述缓冲模块(17)的右端内侧滑动连接有传动拉板(23),所述传动拉板(23)的左端内侧转动连接有定位插杆(24),所述定位插杆(24)滑动连接于偏移定位板(19)的内侧,通过定位插杆(24)使传动拉板(23)将偏移定位板(19)拉动。
50.具体的,所述传动拉板(23)的右端内侧穿设有第二螺杆(27),所述第二螺杆(27)转动连接于缓冲模块(17)内侧,所述第二螺杆(27)的外侧螺纹旋合连接有滑动挡板(26),第二螺杆(27)的转动带动滑动挡板(26)运动,使其沿着第二螺杆(27)的方向在缓冲模块(17)的内侧滑动,所述第二螺杆(27)的外侧设置有复位弹簧(25),所述复位弹簧(25)固定连接于传动拉板(23)与滑动挡板(26)之间,复位弹簧(25)的弹力将传动拉板(23)带动。
51.具体的,所述缓冲模块(17)的右端内侧固定连接有第二电机(29),所述第二电机(29)的主轴末端与第二螺杆(27)的右端均固定连接有传动齿轮(28),所述传动齿轮(28)相互啮合,通过传动齿轮(28)使两个第二螺杆(27)同时转动。
52.具体的,所述潜航器主体(2)的顶端固定连接有水下阻力检测模块(30),对在水下的潜航器主体(2)所受的的水下阻力进行检测,所述潜航器主体(2)的底端固定连接有桨叶推动器(31),方便将潜航器主体(2)进行变向。
53.通过采用上述技术方案:本发明中,通过定位信号接收模块(15)在缓冲模块(17)内的转动,在水下水源的流动会产生推力,带动潜航器主体(2)自身发生偏斜转向,避免构件刚性损伤,通过第二螺杆(27)的转动,使前后两侧的滑动挡板(26)以相反的方向滑动,对复位弹簧(25)进行弹力调节,并通过桨叶推动器(31),使潜航器主体(2)在受到水下的水流作用力时更快速的与回收架(3)对应。
54.以上所述仅的仅为本发明优选的具体实施方式,但本发明的保护范围并不局限于此,对于本技术领域的普通技术人员来说,在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,均应视为本发明的保护范围。