1.本实用新型涉及一种无人舰艇大风浪中安全航行实时智能决策操纵装置,可适用于各类无人舰艇大风浪中航行安全预评估和安全航速航向智能决策及自动操纵,显著降低大风浪中的运动幅值和倾覆风险,辅助安全作业或返航,属于无人舰艇安全航速航向智能决策操纵技术领域。
背景技术:
2.无人舰艇在远离海岸执行任务过程中,不可避免地遭遇大风浪,产生大幅摇荡运动,甚至造成无人舰艇倾覆、无法返航等重大事故。目前,还未发现可智能决策无人舰艇在大风浪中的安全航速航向并规避倾覆风险的有效手段和装置,主要是通过大幅降低使用海况和离岸距离的被动方式规避风险,很大程度上影响了无人舰艇的作业能力。因此,亟待提供一种装置实时采集无人舰艇在大风浪中的航行信息,智能预评估航行安全并提供安全航行操纵策略,自动驱动操纵控制程序并驱动发动机和自动舵,实时调整至安全航速航向,从而降低其在大风浪中的运动幅值和倾覆风险。
3.无人舰艇在大风浪中的摇荡运动幅值与排水量、船型特点、自身固有周期及海浪等级、遭遇海浪波长、周期等密切相关。当运动幅值超过其安全航行衡准一定范围时,无人舰艇将倾覆。对于同样排水量、船型特点的无人舰艇和同样等级、波长的海浪,遭遇周期与无人舰艇固有周期越接近,运动越剧烈,越容易发生倾覆。而遭遇周期由海浪周期以及无人舰艇与海浪的相对航速航向共同决定。因此,该装置的智能决策系统需以耐波性理论为基础,具备智能预评估航行安全,并实时智能决策安全航速航向的功能。
4.无人舰艇大风浪中安全航行实时智能决策操纵装置存在两大主要技术问题。一是如何将航行信息采集系统(包括吃水传感器、气象系统、导航系统)、安全航行智能决策系统、舰艇操控系统(包括操纵控制中心、发动机和自动舵)组合在一起,具备实时信息采集、智能安全航行评估、安全航速航向决策和自动操纵驱动的功能。二是在安全航行智能决策子系统中,如何根据采集的吃水、浪高、浪向、航速、航向等航行信息,实时评估无人舰艇在大风浪中的航行安全,并实时智能决策安全航速航向。目前,尚未有应用于无人舰艇安全航速航向实时智能决策的先例。
技术实现要素:
5.本实用新型要解决的技术问题是无人舰艇大风浪中安全航行实时智能决策操纵的技术难题。
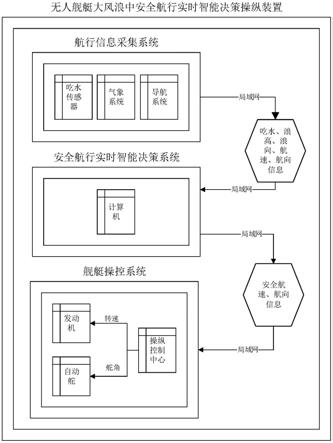
6.为了解决上述技术问题,本实用新型的技术方案是提供了一种无人舰艇大风浪中安全航行实时智能决策操纵装置,其特征在于:包括航行信息采集系统、安全航行实时智能决策系统和舰艇操控系统,所述航行信息采集系统包括吃水传感器、气象系统、导航系统,所述航行信息采集系统与安全航行实时智能决策系统通信连接,所述安全航行实时智能决策系统通信控制舰艇操控系统,所述舰艇操控系统包括操纵控制中心、发动机和自动舵。
7.其中,所述安全航行实时智能决策系统预置来源于耐波性理论的运动与航行安全评估数据库,包含8列数据,分别为:排水量、浪高、航速、相对航向、横摇、纵摇、垂荡、航行安全评估结果;所述航行信息采集系统采集的吃水、浪高、浪向、航速、航向信息,预处理后从数据库中匹配最近的排水量、浪高、航速、相对浪向和航行安全评估结果,实现无人舰艇大风浪中的航行安全实时预评估。
8.本实用新型优点在于可实现无人舰艇大风浪中的航行安全实时预评估、安全航速航向智能决策和自动操纵驱动,能显著降低无人舰艇在大风浪中的运动幅值和倾覆风险,辅助安全作业或返航。
附图说明
9.图1为无人舰艇大风浪中安全航行实时智能决策操纵装置组成及通信数据图;
10.图2为航行安全评估及安全航速航向智能决策流程图。
具体实施方式
11.为使本实用新型更明显易懂,兹以优选实施例,并配合附图作详细说明如下。
12.实施例
13.本实施例提供了一种无人舰艇大风浪中安全航行实时智能决策装置,包括三个子系统,分别是航行信息采集系统(包括吃水传感器、气象系统、导航系统)、安全航行实时智能决策系统和舰艇操控系统(包括操纵控制中心、发动机和自动舵)。以安全航行实时智能决策系统为核心,构建通信连接,打通与无人舰艇上的航行信息采集系统的通信,实时采集吃水、浪高、浪向、航速、航向等航行信息,智能评估无人舰艇在大风浪中的航行安全,并实时智能决策安全航速航向,自动将操纵策略发送给操纵控制程序,驱动发动机和自动舵,实时调整至目标航速航向,可显著降低其在大风浪中的摇荡运动幅值和倾覆风险。
14.装置组成及通信数据如附图1所示。
15.为解决安全航行实时智能决策子系统如何根据采集的航行信息,智能预评估无人舰艇在大风浪中的航行安全,并实时智能决策安全航速航向的技术难题,本实施例在安全航行实时智能决策子系统中预置来源于耐波性理论的运动与航行安全评估数据库,包含8列数据,分别为:排水量、浪高、航速、相对航向、横摇、纵摇、垂荡、航行安全评估结果。将从航行信息采集系统采集的吃水、浪高、浪向、航速、航向信息,预处理后自动从数据库中匹配最近的排水量、浪高、航速、相对浪向和航行安全评估结果。若评估结果为1,则代表可安全航行,若评估结果为0,则代表不可安全航行。若评估结果为不安全,自动从数据库中筛选出与当前航速和目标航向最近的安全航速航向,从而解决了无人舰艇大风浪中的航行安全难以实时评估和安全航速航向难以实时决策的技术难题。
16.航行安全评估及安全航速航向智能决策流程如附图2所示。
17.有益效果
18.本实用新型提供的无人舰艇大风浪中安全航行实时智能决策操纵装置,包括航行信息采集系统(包括吃水传感器、气象系统、导航系统)、安全航行实时智能决策系统和舰艇操控系统(包括操纵控制中心、发动机和自动舵)三个子系统,具备实时信息采集、智能安全航行评估、安全航速航向决策和自动操纵驱动的功能。实现方式简便,成本低,可显著降低
无人舰艇大风浪中的运动幅值和倾覆风险,辅助安全作业或返航。
19.本实用新型的主要内容为:
20.(1)以安全航行实时智能决策系统为核心,构建局域网,通过数据通信的形式,将航行信息采集系统(包括吃水传感器、气象系统、导航系统)、安全航行实时智能决策系统和舰艇操控系统(包括操纵控制中心、发动机和自动舵)组合在一起,组成无人舰艇大风浪中安全航行实时智能决策装置。
21.(2)在安全航行实时智能决策子系统中预置来源于耐波性理论的运动与航行安全评估数据库,包含8列数据,分别为:排水量、浪高、航速、相对航向、横摇、纵摇、垂荡、航行安全评估结果。
22.(3)将从航行信息采集系统采集的吃水、浪高、浪向、航速、航向信息,预处理后自动从数据库中匹配最近的排水量、浪高、航速、相对浪向和航行安全评估结果,具备无人舰艇航行信息实时采集和安全航行实时评估的功能,解决了无人舰艇大风浪中的航行安全性无法实时评估的难题。
23.(4)自动从数据库中筛选出与当前航速和目标航向最近的安全航速航向,自动将操纵策略发送给操纵控制程序,驱动发动机和自动舵,实时调整至安全航速航向,具备安全航速航向智能决策、自动操纵驱动和安全返航的功能,解决了无人舰艇在大风浪中难以实时寻找安全航速航向、安全返航的难题。
24.综上,本实用新型提供了一种无人舰艇大风浪中安全航行实时智能决策操纵装置,包括航行信息采集系统(包括吃水传感器、气象系统、导航系统)、安全航行实时智能决策系统和舰艇操控系统(包括操纵控制中心、发动机和自动舵),具备无人舰艇航行信息实时采集、安全航行实时评估、安全航速航向智能决策和自动操纵驱动的功能,能显著降低无人舰艇大风浪中的运动幅值和倾覆风险。