海底自主航行器的高效海底充电
1.相关申请
2.本技术要求于2020年6月23日提交的美国临时专利申请号63/042,886的权益,其内容整体并入本文。
技术领域
3.本发明涉及海底自主航行器(undersea autonomous vehicle,uav)领域,并且特别地涉及为这些航行器提供电力的电池的充电。
背景技术:
4.水下自主航行器通常包括在水下独立操作的机器人。这种航行器可以是远程控制的,或者可以由机载软件控制以执行特定的任务。uav可以被部署为执行在商业、研究和军事部门中的各种任务。例如,在安装深海基础设施或管道之前,石油和天然气行业可以使用uav来绘制海床的详细地图。科学家可以使用配备有各种传感器的uav来测量海底环境的各个方面。军队具有uav的许多应用,包括例如情报收集、监视和侦察以及战时活动(例如有效载荷递送和反水雷)。
5.uav通常由可再充电电池供电。具有可再充电电池的uav的一个限制是,电池再充电必须以周期性间隔进行,这取决于所执行的任务的强度。目前存在用于为uav电池再充电的几种方法,包括将uav从海底环境物理移除至陆地、通过将uav带到船上以便进行再充电、或通过将充电端口从船降低至海底环境中。在其他情况下,uav可以返回地面并连接到平台以便进行再充电,其中平台可以是太阳能供电、运动供电或风力供电的。然而,使uav从其主要活动中移除以行进到岸上或在海上被恢复以便对电池再充电是低效的。此外,要求地面活动为uav的电池再充电使uav暴露于不期望的监视和恶劣天气的危险。
6.一个或多个充电站已经部署在海床上,uav可以连接到这些充电站以便为其电池再充电。这种充电站通常连接到具有电力容量的海底线缆,当连接到该站时,该电力容量用于为uav充电。海底线缆通常具有带有相对高电压但低电流的电力容量。因此,为uav的电池再充电所需的时间可能是不可接受的。
7.因此,期望的是提供一种为uav再充电同时将uav保持在海底环境中的更有效手段。
技术实现要素:
8.本发明包括对接/充电站,uav可以物理地或无线地对接到该对接/充电站。对接站/充电站配置有电池或其他电力存储设备,该电池或其他电力存储设备在uav从对接站/充电站脱离对接的同时从海底通信系统的分支线缆中的电力导体缓慢充电。当uav与对接/充电站对接时,uav上的机载电池可以使用对接/充电站上机载的电池快速充电。对接站/充电站也可以配置有数据传输和接收硬件,从而允许由uav在其任务期间收集和存储的数据传送到对接站/充电站/从对接站/充电站进行传送,并且然后经由分支线缆中的光纤传送
到岸上设施。
附图说明
9.图1是根据本发明的实施例的典型海底通信系统的框图。
10.图2是从干线线缆转向到分支线缆的电力的示意性表示,如图2(a)所示;以及与分支线缆隔离的干线线缆中的电力,如图2(b)所示。
11.图3示出了从干线线缆转向到分支线缆的光纤的示意图(图3(b)中);和背离分支线缆转向的光纤(图3(a)中)。
12.图4是包含用于调整将由海底有效载荷使用的电力的dc到dc转换模块(dc
‑
to
‑
dc conversion module,ddcm)的电力传送单元的框图。
13.图5是图4中示出的ddcm的一个可能实施例的框图。
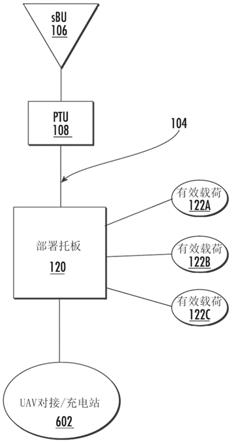
14.图6是端接于部署托板的分支线缆的框图,对接/充电站作为多个有效载荷中的一个附接到该部署托板。
15.图7是图6中示出的对接/充电站的框图,uav与该对接/充电站对接。
具体实施方式
16.海底通信系统通常采用包括一根或多根光纤光缆的海底线缆,每根光缆具有一个或多个光纤对以及一个或多个电力导体。海底通信系统100的一个实施例在图1中以示意性形式示出。通信系统100可以是长距水下系统,该长距水下系统被配置为通过不同长度的线缆将光学信道从传输终端运送到接收终端。通信系统100可以包括干线线缆102,该干线线缆可以在线缆的每个端部处端接于陆基线缆着陆站(cable landing station,cls)110。每个线缆着陆站可以包括用于为线缆102供电的馈电装备(power feed equipment,pfe)112和用于在其间传输和接收光学信号的线路端接装备(line terminating equipment,lte)114。
17.通信系统100通过容纳在线缆102内的光纤传输多个光学信道。该系统可以是双向的,其中每个lte 114包括接收器和发射器,并且每个光纤对用于双向通信。通信系统100可以使用密集波分复用(dense wavelength division multiplexing,dwdm)在光纤上传输通信信道。海底线缆通常包括至少一个电力导体,以向设置在用于放大dwdm信号的线缆着陆站之间的多个海底中继器116以及各种其他组件供电。电力导体可以由在线缆的两端上在岸上的pfe 112供电。pfe 112通常向光缆系统在10kv到20kv之间进行供应,但是也可以使用其他电压。在一些实施例中,分支线缆104可以是双导体线缆,该双导体线缆可以从干线传导电力并连接回干线,以避免必须使用大地接地,如单导体分支线缆所要求的那样。一个或多个分支线缆104可以在不同位置处连接到干线线缆102。分支线缆104可以在岸上端接于cls 110(图1中未示出),或者如图1所示在海底端接到部署托板120。在海底端接的分支线缆104可以用于向连接到部署托板120的各种有效载荷122a
……
122c传送数据/从其传送数据,并向各种有效载荷提供电力。有效载荷122a
……
122c可以是例如不同类型的传感器阵列。
18.干线线缆102可以包括开关分支单元(switch branching unit,sbu)106,该开关分支单元能够将电力和dwdm光学信道两者切换到分支线缆104。图2(a)示出了来自干线线
缆102的电力经由导体202被转向到分支线缆104,并且经由导体204返回到干线线缆102。图2(b)示出了处于未通电、被绕过状态的分支线缆104,其中来自干线线缆102的电力经由干线线缆102中的单个导体206绕过分支线缆104。通过在命令信道上向sbu 106发送光学信号,sbu 106可以从岸上经由lte 114进行配置。如图3(b)所示,干线线缆102中的光纤上的通信信号可以被转向到分支104。图3(a)示出了绕过分支线缆104的光纤302。应该注意的是,虽然图3看起来只示出了一对光纤上的信号被转向到分支线缆106,但是也可以在每对的基础上将多对光纤上的通信信号从干线线缆102转向到分支线缆104。在一些实施例中,可以将光纤中的全部波长的光发送到分支线缆,或者分出或添加各种波长的光。
19.回到图1,一个或多个部署托板120可以连接到分支线缆104。部署托板120用作一个或多个有效载荷122可以连接到其上的基座。有效载荷122可以包括例如各种类型的传感器阵列或具有商业、研究或军事应用的其他装备。例如,有效载荷122a可以包括地震仪,以从海洋底部收集地震读数。部署托板120可以将电力从分支线缆104传到有效载荷122。此外,部署托板120可以实现与有效载荷122的双向通信,从而允许收集由有效载荷122收集的数据和发出命令两者来配置有效载荷122。部署托板120可以配备有多个商业可用的湿式配合连接器或其他类型的连接器,使得一个或多个有效载荷122可以容易地连接到部署托板120或从部署托板断开。也可以使用无线技术进行电力和数据连接。替代性地,单个有效载荷122可以直接连接到分支线缆104,而无需部署托板120。
20.因为干线线缆102通常在10kv至20kv下操作,所以递送到分支线缆104的电力可以由电力传送单元(ptu)108调整。ptu 108可以包括dc到dc转换器模块(ddcm),该dc到dc转换器模块可以将电压从干线线缆102处的高电平步进到附接到分支线缆104的有效载荷122所需的较低电平。在一些实施例中,可以通过经由光纤中的一个或多个侧载波带或命令带来发送命令信号从岸上控制ptu 108,以控制递送到附接到分支线缆104的有效载荷122的电压的水平,以及此外控制电流水平。ptu 108因此将有效载荷122与高干线电压隔离。ptu 108可以是可控的,以向有效载荷122提供恒流或恒压操作,并且可以被设置成将输出电力限制到小于其全输出电力电势的值。
21.图4是ptu 108的框图。ptu 108耦接到sbu 106下游的分支线缆104。出于解释的目的,假设分支线缆104具有两个电力导体408a和408b。干线线缆102可以具有单个电力导体或双电力导体。ptu 108包括电力和遥测单元402,该电力和遥测单元包括适于经由分支线缆104中的光纤406发送和接收光学信号的电路系统和组件。在这种情况下,sbu 106必须被配置成将光学信号从干线线缆102中的光纤传到分支线缆104中的光纤。电力和遥测单元402使用所接收的光学信号来配置和调节dc到dc转换器模块(ddcm)404的操作,例如应用新的操作参数,诸如电压设定点和源模式(恒流、恒压)。在410,经调整的电压从ptu 108输出到下游目的地(例如部署托板120),以为一个或多个有效载荷122供电。
22.图5是示出适用于在ptu 108中使用的ddcm 404的一个可能实施例的图。ddcm 404包括第一、第二和第三端口408a、408b和410,其中端口中的每一个被配置成耦接到线缆段的电导体。例如,第一端口408a可以被配置为耦接到分支线缆104的第一电导体。第二端口408b可以被配置为耦接到分支线缆104的第二电导体,并且第三端口410可以被配置为耦接到分支线缆104下游的电导体。ddcm 404可以被配置为从第一和第二端口408a、408b中的一个或两个提取电流,以经由第三端口410向分支提供电力。
23.如进一步所示,ddcm 404包括钳位电路502、第一和第二转换器504
‑
1、504
‑
2、控制器506、整流器514、滤波器516和钳位电路508。控制器506可以经由ptu 108的电力和遥测单元402中的电源供电。在一些情况下,控制器506可以实施在电力和遥测单元402内,并且不一定是所示的分离的组件。控制器506可以被实施为微处理器、处理器、电路系统、现场可编程门阵列(field programmable gate array,fpga)或任何其他合适的控制器设备。第一和第二转换器504
‑
1、504
‑
2可以被配置成产生经调控的dc电压,并且然后可以斩波经调控的dc电压以产生ac信号。虽然图5中仅示出了第一和第二转换器,但是应该认识到可以使用多个转换器。ac然后可以通过变压器以便进行隔离,并且然后分别经由整流器514和滤波器516被整流和滤波,以产生dc输出。ddcm的输出区段可以配置有多个级。例如,输出上的钳位电路508可以确保线缆被放电以获得工人安全。在线缆故障期间,输入上的钳位电路502将转换器周围的浪涌电流转向(例如,提供通路)。钳位电路502也可以在每个干线线缆上钳位到接地,以在对各个干线线缆进行修理时保护工人。
24.第一和第二转换器504
‑
1、504
‑
2因此可以提供两个电力级。第一和第二转换器504
‑
1、504
‑
2中的每一个可以包括升压转换器(未示出)和斩波器(未示出)。例如,第一和第二转换器504
‑
1、504
‑
2可以配置有半桥(例如,两个晶体管配置)或全桥(例如,四个晶体管配置)切换布置。第一和第二转换器504
‑
1、504
‑
2中的每一个可以根据当前操作模式通过例如经由控制器506进行的软切换(例如pwm信号)来操作,以对来自第一和第二端口408a、408b中的一个或两者的线路电流的某一部分进行导引。其他电力调控方案在本公开的范围内,并且本公开不一定限于pwm实施方式。此外,公共变压器可以与磁通量一起使用,从而在输出级添加电力。在任何情况下,第一和第二转换器504
‑
1、504
‑
2可以将经升压的电流馈送到斩波器,其中每个相应斩波器驱动隔离变压器530的初级绕组。隔离变压器530可以在第一和第二端口408a、408b和第三端口410之间提供流电(galvanic)隔离。
25.第一和第二转换器504
‑
1、504
‑
2的升压转换器中的每一个可以分别经由第一和第二脉宽调制(pwm)信号由控制器506驱动,其中第一pwm信号不同于第二pwm信号。控制器506可以基于第一和第二pwm信号从第一和第二端口408a、408b中的每一个汲取不对称负载。控制器506因此可以从第一和第二端口408a、408b汲取不同量的电力,以实现期望的输出电流/电压。取决于期望的配置,第一和第二转换器504
‑
1、504
‑
2中的每一个可以被配置为相同或不同。输出(例如端口410)的调节相对类似于单输入转换器的调节,其中添加了控制方案,该控制方案确保第一和第二转换器504
‑
1、504
‑
2的切换以选择性地从第一和第二端口408a、408b中的每一个提取电流。以这样的方式进行切换可以确保第一转换器504
‑
1被切换为“接通”,而第二转换器504
‑
2被切换为“断开”,反之亦然,以防止同时通过两个端口的输入。在转换器504
‑
1、504
‑
2中的每一个被切换为“接通”的时间期间,电流流过端口408a、408b。通过控制第一转换器504
‑
1在其期间相对于第二转换器504
‑
2被切换为接通的时间的比例,可以控制输入电流的比率。在实施例中,第一和第二端口408a、408b之间的输入电流的比率不一定依赖于总输出负载电流,只要对第一和第二转换器504
‑
1、504
‑
2中的每一个的占空比控制(例如第一和第二pwm信号)以这样的方式缩放两个输入电流时间:即,经由第一端口408a和第二端口408b的输入的比率保持基本恒定。在一些情况下,ddcm 404可以利用周期内切换方案或诸如逐周期操作的其他方案来输出恒定电流或恒定电压。ddcm 404的所描述的实施例应该仅被认为是示例性的。在本发明的预期范围内,ddcm 404的其他实施
例是可能的。
26.参考图6,有效载荷122中的一个可以是用于uav 750的对接/充电站602,在图7中以示意形式被示出为对接到对接/充电站602。uav 750通常包括电池752以为uav 750提供动力,并为用于导航和用于控制要由uav 750执行的任务的机载电路系统供电。uav 750还可以包括数据存储装置754,该数据存储装置包含由uav 750在与对接/充电站602脱离时收集的数据。
27.进一步参考图7,对接/充电站602可以连接到部署托板120,并且可以配置有电池704,该电池可以在uav 750从对接/充电站602脱离对接时被缓慢充电。因为分支线缆104具有递送电力的有限能力,所以在uav 750脱离对接的同时,电池704可以随着时间被缓慢充电。当uav 750与对接/充电站602对接时,uav 750中的电池752可以从对接/充电站602中的电池704被快速充电。
28.此外,对接站/充电站602可以装配有数据交换模块706,以通过包含在分支线缆104中的光缆传输由uav 750收集并存储在数据存储装置754中的数据。附加地,在uav 750与对接/充电站602接合以便进行充电时,数据和新的任务指令可以从对接/充电站602传输到uav 750。在一些实施例中,部署托板120可以是可选的,并且分支线缆104可以直接连接到对接/充电站602。
29.除了图7中示出的组件之外,对接/充电站602还可以包括允许uav 750与对接/充电站602接合(对接)的硬件。注意,uav 750可以通过物理对接或以其他方式在uav 750和对接/充电站602之间建立一个或多个物理数据和电力连接来与对接/充电站602“接合”。在其他实施例中,术语“接合”可以被解释为意味着数据和/或电力在uav 750和对接/充电站602之间无线交换。此外,对接/充电站602可以进一步配置有充当信标或发射器的硬件,从而允许uav 750容易地定位和/或标识对接/充电站602。在其他实施例中,uav 750和对接/充电站602之间的数据连接可以是双向的,从而允许命令或程序经由分支线缆104发送到uav 750。
30.已经大体描述了各种实施例。如本领域技术人员将认识到的那样,本发明的实际实施方式可以偏离所描述的实施例,但是将在如以下权利要求所阐述的本发明范围内。