1.本实用新型涉及救援产品技术,尤其涉及了水面救援机器人。
背景技术:
2.救生圈是常用的水上救生设备之一,通常由泡沫塑料或其他比重较小的轻型材料制成。目前的救生圈尚存在以下问题:在救援过程中,救生圈需要人工抛洒,如果现场环境复杂不利于救援,则极为影响救援工作,甚至无法顺利实施救援。另一方面,现有救生圈一般都较为厚重,而重量较轻的又容易受风力或空气阻力影响,导致救生圈抛洒的准确性极难控制。
3.现有的救生圈缺乏必要的照明设备,若救援现场处于夜晚或光线不足的环境时,会延误救援人员发现落水者的时间,从而失去最佳救援时机。现有的救生圈没有通信系统,落水人员落水后,精神会紧张,即使看到救生圈,也不会正确使用,从而影响救援效率。
4.例如专利名称为:一种自带动力系统的可遥控救生圈;专利申请号为:cn201811352364.0,申请日为:2018
‑
11
‑
14,包括u型救生圈主机体以及分别设置于所述u型救生圈主机体两端端头部位的推进器;在所述救生圈主机体内部安设有控制器、储电池、用于对推进器的运行进行控制的动力控制电路单元以及用于接收来自外部移动终端的控制信号的遥控信号接收装置;该推进器、储电池、动力控制电路单元以及遥控信号接收装置与控制器电性连接;所述推进器与救生圈主机体之间旋转式活动连接。该技术设计的求生圈不能很好的实现双面航行,且不能很好的控制抢救时间。
技术实现要素:
5.本实用新型针对技术设计的求生圈不能很好的实现双面航行,且不能很好的控制抢救时间的问题,提供了水面救援机器人。
6.为了解决上述技术问题,本实用新型通过下述技术方案得以解决:
7.水面救援机器人,包括u型水面救援机器人主体以及分别设置于u型水面救援机器人主体两端端头部位的推进器;u型水面救援机器人主体上设有电源单元、主控制单元、监控单元和显示单元;电源单元提供电源至水面救援机器人主体;主控制单元接收监控单元的监控信号,并发送信号至显示单元;推进器包括驱动电机和电子调节器;电子调节器调节驱动电机的转速,
8.驱动电机至少为4个;驱动电机接收主控制单元的控制信号。
9.驱动电机为大功率的喷水驱动电机,通过设有大功率的喷水驱动电机,其救援机器人航行速度快,最大空载速度可以达到每小时 24km/h,从而能够快速抵达遇险者身边,最大载人速度12km/h,加快速救援返程,争取最佳抢救时间。操作灵活,可以原地掉头,且适合在狭窄复杂水域使用。
10.作为优选,推进器还包括螺旋桨;电子调节器调节驱动电机的转速,驱动电机带动螺旋桨运转。
11.作为优选,驱动电机包括电机导流罩、电机定子和电机转子;电机定子(232)与电机转子连接,位于电机导流罩内。设计的推进器其推力损失会更少,推进效率更高。
12.作为优选,还包括远程控制单元,远程控制单元接收主控制单元的信号,并控制推进器的动作。
13.远程控制单元为远程无线控制遥控器,通过遥控器进行远程操控,能够使救援机器人快速精准地移动到落水者身边,而无需落水者耗费体力去找救援机器人,大大提高了救援效率。
14.作为优选,监控单元包括可见光和红外光监控装置。通过设有可见光和红外光的监控装置,救援机器人能够在恶劣条件下及时找到并观察遇险者,便于救援。
15.作为优选,显示单元包括led前照灯和led尾灯;led尾灯位于 u型水面救援机器人主体两端端头部位;led前照灯位于u型水面救援机器人主体尾部。
16.作为优选,电源单元包括装有锂电池的电池仓和电池仓盖;电池仓盖上设有防水接头。
17.作为优选,电池仓和电池仓盖为金属材质,金属外壳其导热性好,具有坚固耐冲击特性。
18.作为优选,锂电池为三元聚合物锂/磷酸铁锂电池,通过液体冷却技术,其放电电流大,使用寿命长、安全性高。
19.作为优选,救援机器人主体内还设有用于语音对话的语音单元。语音单元通过无线通讯进行语音的传播。
20.作为优选,救援机器人主体内还设有用于感应姿态的姿态传感器。姿态传感器将采集的信号传送至主控制单元,从而发送信号至推进器,姿态感应自动切换上下两个推进器
21.本实用新型由于采用了以上技术方案,具有显著的技术效果:
22.本实用新型的驱动电机为大功率的喷水驱动电机,通过设有大功率的喷水驱动电机,其救援机器人航行速度快,最大空载速度可以达到每小时24km/h,从而能够快速抵达遇险者身边,最大载人速度 12km/h,加快速救援返程,争取最佳抢救时间。操作灵活,可以原地掉头,且适合在狭窄复杂水域使用。
附图说明
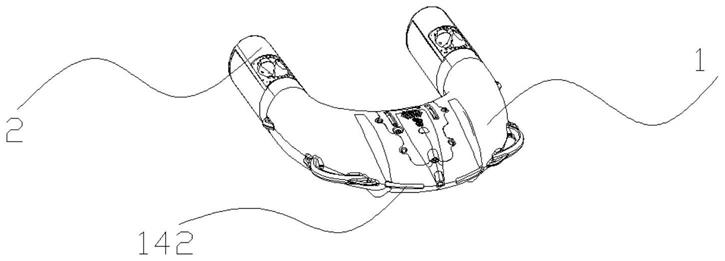
23.图1是本实用新型立体结构图。
24.图2是本实用新型电源单元结构图。
25.图3是本实用新型立体结构图。
26.图4是本实用新型系统图。
27.图5是本实用新型推进器结构图。
28.以上附图中各数字标号所指代的部位名称如下:其中,1—救援机器人主体、2—推进器、11—电源单元、12—主控制单元,13—监控单元、14—显示单元、141—led前照灯、142—led尾灯、21—电子调节器、22—螺旋桨、23—驱动电机、231—电机导流罩、232—电机定子、233—电机转子,111—电池仓、112—电池仓盖、113—防水接头。
具体实施方式
29.下面结合附图与实施例对本实用新型作进一步详细描述。
30.实施例1
31.水面救援机器人,包括u型水面救援机器人主体1以及分别设置于u型水面救援机器人主体1两端端头部位的推进器2;u型水面救援机器人主体1上设有电源单元11、主控制单元12、监控单元13 和显示单元14;电源单元11提供电源至水面救援机器人主体1;主控制单元12接收监控单元13的监控信号,并发送信号至显示单元 14;
32.推进器2包括驱动电机23和电子调节器21;电子调节器21调节驱动电机23的转速,驱动电机23至少为4个;驱动电机23接收主控制单元12的控制信号。
33.驱动电机23为大功率的喷水驱动电机23,通过设有大功率的喷水驱动电机23,其救援机器人航行速度快,最大空载速度可以达到每小时24km/h,从而能够快速抵达遇险者身边,最大载人速度12km/h,加快速救援返程,争取最佳抢救时间。操作灵活,可以原地掉头,且适合在狭窄复杂水域使用。
34.推进器2还包括螺旋桨22;电子调节器21调节驱动电机23的转速,驱动电机23带动螺旋桨22运转。
35.驱动电机23包括电机导流罩231、电机定子232和电机转子233;电机定子(232)与电机转子233连接,位于电机导流罩231内。设计的推进器2其推力损失会更少,推进效率更高。
36.监控单元13包括可见光和红外光监控装置。通过设有可见光和红外光的监控装置,救援机器人能够在恶劣条件下及时找到并观察遇险者,便于救援。
37.电源单元11包括装有锂电池的电池仓111和电池仓盖112;电池仓盖112上设有防水接头113。
38.电池仓111和电池仓盖112为金属材质,金属外壳其导热性好,具有坚固耐冲击特性。
39.锂电池为三元聚合物锂/磷酸铁锂电池,通过液体冷却技术,其放电电流大,使用寿命长、安全性高。
40.显示单元14包括led前照灯141和led尾灯142;led尾灯142 位于u型水面救援机器人主体1两端端头部位;led前照灯141位于 u型水面救援机器人主体1尾部,尾部的两侧均设有led前照灯141。
41.实施例2
42.在实施例1基础上,本实施例还包括远程控制单元,远程控制单元接收主控制单元12的信号,并控制推进器2的动作。
43.远程控制单元为远程无线控制遥控器,通过遥控器进行远程操控,能够使救援机器人快速精准地移动到落水者身边,而无需落水者耗费体力去找救援机器人,大大提高了救援效率。
44.实施例3
45.在上述实施例基础上,本实施例的推进器2包括4个驱动电机 23;驱动电机23接收主控制单元12的控制信号。
46.实施例4
47.在上述实施例基础上,本实施例的救援机器人主体1内还设有用于语音对话的语音单元。语音单元通过无线通讯进行语音的传播。
48.实施例5
49.在上述实施例基础上,本实施例的救援机器人主体1内还设有用于感应姿态的姿态传感器。姿态传感器将采集的信号传送至主控制单元,从而发送信号至推进器,自动切换推进器的方向。