波浪能续航型蝠鲼式auv
技术领域
1.本发明涉及水下仿生机器人技术领域,特别是涉及一种仿蝠鲼外形利用波浪能发电的auv。
背景技术:
2.海洋这块覆盖着地球表面的四分之三的“蓝色领土”,不但自身蕴藏着比陆地更为丰富的食物能源及矿产资源,而且也为各国的海上运输和军事战略提供了宝贵的通道和战略空间。水下机器人作为高效的水下平台在海洋开发与利用中起到了至关重要的作用。水下推进技术作为水下机器人的关键技术之一,一直以来都是国内外科研机构关注的重点。由于考虑到控制的复杂程度较大,目前绝大部分的水下机器人是螺旋桨驱动的,这使得水下机器人存在尺寸较大、稳定性差、噪声大、效率低等问题,即使在低速条件下,这些问题依然明显。为了更好地解决这些问题,可以运用仿生学原理开发仿生鱼类的水下机器人。因为蝠鲼运动在推进效率、转弯机动性、游动稳定性等方面,体现出胸鳍升力推进模式具有较为明显优势,蝠鲼的运动模式引起了研究人员的注意。
3.现有的蝠鲼型水下仿生机器人的设计中较少涉及到蝠鲼在上浮下沉和水下悬停的实施方案;在水下续航能力方面也缺少有效的利用新型环保能源与蝠鲼构型设计相结合的实施方案。
技术实现要素:
4.为了克服上述现有技术的不足,本发明提供了一种通过改变自重实现上浮下沉和水中悬停的构型设计,同时自重式可利用波浪能发电的蝠鲼型水下仿生auv。
5.本发明所采用的技术方案是:本装置设计将每根鳍条和能量传输带平行放置,左右两端为电能转换装置,当蝠鲼型auv利用胸鳍扑动运动时,附着在鳍条表面的压电薄膜在主动扑动与流体之间的作用之下,表面产生极化现象,此时可以通过环绕在随之运动的鳍条上的能量传输带,将由极化产生的电电荷传送到电能转化装置。利用在整个装置的表面涂刷防腐涂料,延长装置的使用寿命。单节利用波浪能发电装置的内部为两层压电薄膜pvdf,压电薄膜中间铺设电极。单节鳍条的两端内侧装有能量转换器,将压电能转换成稳定的电流。在鳍条远离蝠鲼主体的一端装有缆绳和桩腿缆绳,内部装有输电线可将电能输至安装板上的固定电源端。从而实现了利用波浪能转化为机械能的仿生辅助推进机构装置。
6.与现有技术相比,本发明的有益效果是在利用蝠鲼型水下仿生auv的柔性胸鳍主动扑动与流体发生耦合的同时,在鳍条上设计安装了压电薄膜,实现了利用清洁能源——波浪能进行发电,有效改善了机器鱼水下续航的能力。
附图说明
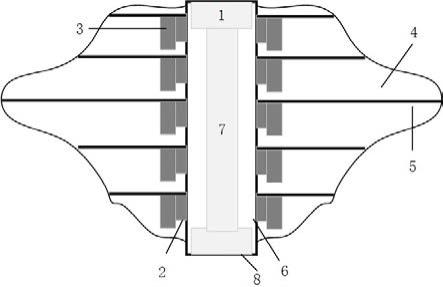
7.图1本波浪能续航型蝠鲼式auv的构型俯视二维图。
8.图2本波浪能续航型蝠鲼式auv利用波浪能发电装置鳍条设计。
9.图3本波浪能续航型蝠鲼式auv设计的压电薄膜结构三维图。
10.图4本波浪能续航型蝠鲼式auv设计的主视二维图。
11.图中: 抽水泵(1)、电机固定夹(2)、电机(3)、柔性胸鳍(4)、鳍条(5)、电源控制板(6)、储水仓(7)、安装平台(8)、电能转换装置(9)、能量传输带(10)、电能转换装置(11)、鳍条(12)、电极薄膜(13)、电极(14)、外壳(15)。
具体实施方式
12.下面结合附图1对本发明作进一步详细说明。
13.具体实施方式一:如图1所示,一种波浪能续航型蝠鲼式auv,具体的外形设计思路为:整体呈扁平形状,身体部分厚度高于胸鳍,胸鳍为前缘外凸,后缘内凹的类三角形,左右胸鳍几何对称构成其外形轮廓,结合稳定性较好的扁平型轮廓和阻力性能较好的鱼雷型轮廓15,并考虑到主体内部模块安装的需求,将纵截面设计为主体部分翼型各不相同、胸鳍部分翼型相同的翼型结构。设计完成主视图如图4所示。
14.具体实施方式二:在胸鳍部分的设计中,主要是运用蝠鲼以鳍条5运动带动鳍面4的形式,采用多根刚性鳍条以一定初相位差带动柔性硅胶板鳍面运动,从而实现鳍面特定的波动运动。单侧胸鳍上设计的五根鳍条,由前往后按一定距离等角度布置。每根鳍条由单独的电机3驱动,电机由电机固定夹2固定,可以单独接受控制系统指令,实现胸鳍波动运动需要的摆幅、频率和相序,最终实现仿生胸鳍的波动运动。
15.具体实施方式三:在波浪能续航型蝠鲼式auv的安装平台中间固定安装一个储水仓7和两个直流微型隔膜水泵(kpv14a
‑
6a)1,微型水泵的一个端口通过乳胶管与储水仓连接,另一端口则通过主体操作板开口与外部相连,通过控制两水泵的独立工作即可实现从外部吸水和从水袋排水两种功能,调节水袋内的储水量。通过储水量的调节即可控制auv的自重,从而调整在水下的沉浮。
16.具体实施方式四:本波浪能续航型蝠鲼式auv设计将每根鳍条5和能量传输带10平行放置,左右两端为电能转换装置9,当蝠鲼型auv利用胸鳍扑动运动时,附着在鳍条表面的电极薄膜13在主动扑动与流体之间的作用之下,表面产生极化现象,此时可以通过环绕在随之运动的鳍条上的能量传输带,将由极化产生的电电荷传送到电能转化装置。利用在整个装置的表面涂刷防腐涂料,延长装置的使用寿命。单节利用波浪能发电装置的内部为两层压电薄膜pvdf13,压电薄膜中间铺设电极14。单节鳍条的两端内侧装有能量转换器,将压电能转换成稳定的电流。在鳍条远离蝠鲼主体的一端装有缆绳和桩腿缆绳,内部装有输电线可将电能输至电源控制板电池6。
技术特征:
1.一种基于电机驱动的波浪能续航型蝠鲼式auv,其特征在于:机器鱼主体板,主体板外形为仿蝠鲼外形的流线形主要包括了:抽水泵(1)、电机固定夹(2)、电机(3)、沉浮调节机构、连接单元(5)、固定电源(6)、储水仓(7)、控制缆线、螺孔和减速器;安装平台(8)由较厚的刚性铝板加工而成,其上阵列排列)螺孔,用于安装电机(3)和固定电源(6)、和控制线缆并安装形成电路;在安装平台(8)上设计安装了沉浮调节装置;在柔性波动胸鳍推进机构的部分主要包括了波浪能水下发电装置(6)柔性胸鳍面、能量传输带(10)、电能转换装置(11)、鳍条(12)、电极薄膜(13)和704硅胶密封。2.根据权利要求1所述的固定电源(6),其特征在于:控制电路板的供电电源采用两块容量为800mah,电源电压为7.4v的锂电充电电池,通过8安培外置式开关电源稳压装置(ubec)为电路板提供稳定的5v输入电压,电池容量可保证机器鱼胸鳍驱动电机和控制电路板连续工作40分钟。3.根据权利要求1所述的沉浮调节机构,其特征在于:在(安装平台(8)上设计安装了两个直流微型隔膜水泵(kpv14a
‑
6a)(1)、乳胶水管和储水仓(7),通过l9110sc的芯片作为电机的驱动器驱动,控制沉浮调节机构的工作,用来调节自重以达到在水下实现自主沉浮的目的。4.根据权利要求1所述的仿生鳍条(12),其特征在于:为了保证鳍条的强度、耐腐蚀性、高模量和易加工等特性,本构型设计将胸鳍鳍条料选为碳纤维,为了使蝠鲼的背鳍上一般呈现一个完整正弦波形,本波浪能续航型蝠鲼式auv构型设计选用鳍条数目为10根,并且由前往后等间距的排列,长度依胸鳍的展向宽度的变化而各有不同,鳍条通过螺钉固定在输出轴盘上,鳍条和鳍面通过纤维绳固定以便拆装,保证胸鳍后缘鳍面的随动,相邻鳍条间的鳍面必须留有一定的冗余度,以确保鳍条摆动时不会互相限制。5.根据权利要求3所述的l9110sc的芯片作为电机的驱动器驱动,其特征在于:该芯片具有较大的直流驱动能力,每个通道能通过750ma~800ma的持续电路,峰值电流能力可达1.5a~2a,同时还具有过温保护和释放感性负载反向冲击电流的功能。6.根据权利要求4所述的仿生鳍条(12),其特征在于:当蝠鲼型auv利用胸鳍扑动运动时,附着在鳍条表面的波浪能发电装置(9)包括电极薄膜(13)在主动扑动与流体之间的作用之下,表面产生极化现象,此时可以通过环绕在随之运动的鳍条上的能量传输带(10),将由极化产生的电荷传送到电能转化装置,鳍条的两端内侧装有电能转化装置,将压电能转换成稳定的电流,从而实现波浪能的发电利用。7.根据权利要求4所述的蝠鲼型仿生auv,其特征在于:所述的蝠鲼型auv的整体部分外形为仿蝠鲼外型的流线型。
技术总结
本发明公开了一种波浪能续航型蝠鲼式AUV(Autonomous Underwater Vehicle),本构型设计借助水下生物——蝠鲼为仿生原型,通过储水量调节法,在AUV主体操作板中间固定安装一个储水仓和两个直流微型隔膜水泵(KPV14A
技术研发人员:杨鹏 王佳茂 李泽华
受保护的技术使用者:海南大学
技术研发日:2021.04.14
技术公布日:2021/12/21