1.本实用新型属于水上救援领域,具体涉及一种水上救援装置及全自主无人巡逻救援船。
背景技术:
2.近年来,无人驾驶汽车和无人机逐渐为大众所熟悉。无人船具有无人驾驶汽车和无人机所不具备的优势,能够在水面上进行作业,国内无人船用途多为测绘、水文和水质监测,国内自主研发的“领航者”号海洋高速无人船,融合多种高新技术、能够广泛应用于环保监测和搜索救援、安防巡逻等领域的“水面智能机器人”。
3.现有的技术中,无人船会用于水灾中的遇难者搜救工作,无人船在搜救过程中根据预先设定的路径进行搜救,通常只是进行搜救作业并将搜救到的信息传输给搜救人员,在救灾过程中大多承担获取遇难者信息的角色,在对遇难者进行施救的功能上存在不足,不能够对遇难者进行有效的施救。
4.如公开号“cn212580116u
‑
一种救灾无人船”中的技术方案,在船体的尾部及两侧分别设置有一个救生圈,用于救援,且船体尾部的救生圈通过连接绳与船体相连接,但该方案中的救生圈没有自动抛投放下的机构,需要由遇难者自行取下进行自救,导致使用不便,影响救援的效率和成功率。
技术实现要素:
5.本实用新型目的在于为克服现有的技术缺陷,提供一种水上救援装置,可自动向下抛投救生圈,使用过程方便、简单,可有效提高救援的效率和成功率。
6.为了解决上述技术问题,本实用新型提供了一种水上救援装置,安装在无人船上,所述水上救援装置包括:
7.支架;
8.u型架,所述u型架设于所述支架的一侧,且所述u型架的开口朝下;
9.支撑件,所述支撑件设于所述u型架的开口处,且所述支撑件的一端转动设于所述u型架的一端;
10.救生圈,所述救生圈套装于所述u型架与支撑件之间;
11.驱动装置,所述驱动装置设于所述支架上,且所述驱动装置用于控制所述支撑件的转动,以使所述u型架的开口为开启或闭合状态。
12.进一步的,所述支撑件包括延伸入所述u型架的开口处的第一端以及向外延伸与所述驱动装置配合的第二端,且所述支撑件的第一端的长度大于第二端的长度,以使所述支撑件自由向下转动时为第一端向下转动。
13.进一步的,所述驱动装置包括设于所述支撑件一侧的舵机以及设于所述舵机的转动轴上的摇臂,所述摇臂的一端设于所述支撑件的第二端上侧,以限制所述支撑件自由向下转动。
14.进一步的,所述水上救援装置还包括:
15.固定板,所述固定板设于所述支架上,所述舵机设于所述固定板上。
16.进一步的,所述救生圈的内外周面分别与所述支撑件和u型架抵接。
17.本实用新型还提供了一种全自主无人巡逻救援船,包括无人船,还包括至少一个如上任一项所述的水上救援装置,所述水上救援装置通过所述支架固定在所述无人船上。
18.进一步的,所述无人船包括:
19.船体,所述水上救援装置对称设置在所述船体的两侧,且所述救生圈与船体之间设有用于连接两者的连接件;
20.推进器,所述推进器对称设置在所述船体的后端两侧;
21.多个激光雷达,所述激光雷达分别设于所述船体前端和两侧;
22.摄像头,所述摄像头设于所述船体的上端前侧;
23.gps天线,所述gps天线设于所述船体的上端;
24.声光报警器,所述声光报警器设于所述船体的上端;
25.照明灯,所述照明灯设于所述船体的上端;
26.通信天线,所述通信天线设于所述船体的上端。
27.进一步的,所述无人船还包括:
28.中央控制模块和电池,所述中央控制模块和电池均设于所述船体内,且所述推进器、gps天线、激光雷达、通信天线、声光报警器、摄像头、照明灯和电池均与所述中央控制模块电连接。
29.进一步的,所述无人船还包括:
30.防撞装置,所述防撞装置对称设置在所述船体的后端两侧并位于所述推进器的上方,所述防撞装置包括向外倾斜设置的固定架以及转动设于所述固定架上的防撞轮。
31.进一步的,所述推进器的外部设有保护网罩;所述船体底部的左右两端均设有船体保护杠。
32.本实用新型具有以下有益效果:
33.本实用新型初始时通过开口朝下的u型架和支撑件共同固定救生圈,但在需要放下救生圈时,可通过驱动装置控制支撑件向下转动,以打开u型架的开口,使救生圈可自由下落至水面上对落水者进行救援,从而实现了救生圈的自动抛投下落的目的,解决现有技术中救生圈还需落水者自行取下导致使用不便和救援效率低的问题,该装置使用过程方便、简单,可有效提高救援的效率和成功率;支撑件为跷跷板结构,利用自身的重力及救生圈的重力超一端下落来打开u型架的开口,还利用舵机、摇臂与支撑件配合,用于压住支撑件的一端,使其保持水平并闭合u型架的开口,整体结构简单、可靠。
附图说明
34.此处所说明的附图用来提供对本实用新型的进一步理解,构成本技术的一部分,并不构成对本实用新型的不当限定,在附图中:
35.图1为实施例中水上救援装置与无人船组装后的示意图;
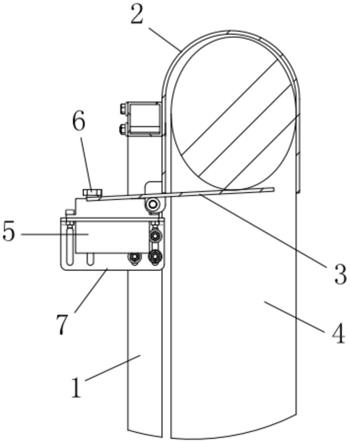
36.图2为图1中a的放大示意图;
37.图3为图2中位于u型架处的剖视图;
38.图4为图3中支撑件向下转动并放下救生圈后的示意图;
39.图5为实施例2中无人船的示意图;
40.图6为实施例2中无人船的侧视图;
41.图7为实施例2中无人船的控制原理图。
具体实施方式
42.为了更充分的理解本实用新型的技术内容,下面将结合附图以及具体实施例对本实用新型作进一步介绍和说明。
43.实施例1
44.如图1
‑
4所示,本实施例所示的一种水上救援装置,其安装在无人船上,该水上救援装置包括支架1、u型架2、支撑件3、救生圈4和驱动装置;u型架2通过螺丝固定设于支架1的上端外侧,且u型架2的开口朝下,支撑件3设于u型架2的开口处,且支撑件3的一端转动设于u型架2的一端,救生圈4套装于u型架2与支撑件3之间,驱动装置设于支架1上,且驱动装置用于控制支撑件3的转动,以使u型架2的开口为开启或闭合状态。
45.上述结构中,初始时通过开口朝下的u型架和支撑件共同固定救生圈,但在需要放下救生圈时,可通过驱动装置控制支撑件向下转动,以打开u型架的开口,使救生圈可自由下落至水面上对落水者进行救援,从而实现了救生圈的自动抛投下落的目的,解决现有技术中救生圈还需落水者自行取下导致使用不便和救援效率低的问题,该装置使用过程方便、简单,可有效提高救援的效率和成功率。
46.具体的,支撑件3包括延伸入u型架2的开口处的第一端以及向外延伸与驱动装置配合的第二端,且支撑件3的第一端的长度大于第二端的长度,便于转动打开支撑件,以使支撑件3自由向下转动时为第一端向下转动。
47.如图2所示,驱动装置包括设于支撑件3一侧的舵机5以及一端设于舵机5的转动轴上的摇臂6,摇臂6的另一端设于支撑件3的第二端上侧,用于压住支撑件3的第二端,以限制支撑件3自由向下转动;上述中,u型架及支撑件共同固定救生圈,支撑件为跷跷板结构,一边是救生圈,另一边是摇臂,在需要放下救生圈时,通过舵机控制摇臂旋转,使其离开支撑件的第二端,这时支撑件的第一端受力自由向下转动(如图4所示),使被限制在u型架上的救生圈自行掉落如水中对落水者进行救援。
48.具体的,该水上救援装置还包括固定板7,固定板7固定于支架1上,舵机5设于固定板7上。
49.具体的,救生圈4的内外周面分别与支撑件3和u型架2抵接,使救生圈被夹紧,避免救生圈出现随意转动的问题。
50.于其它实施例中,驱动装置还可以采用气缸或电机等,通过气缸或电机与支撑件的第二端传动连接,进而驱使支撑件向上或向下转动。
51.实施例2
52.如图1
‑
7所示,本实施例提供了一种全自主无人巡逻救援船,包括无人船,还包括至少一个如实施例1所述的水上救援装置,水上救援装置通过支架1固定在无人船上。
53.本实施例中,该无人船包括船体10、推进器11、多个激光雷达12、摄像头13、gps天线14、声光报警器15、照明灯16和通信天线17,水上救援装置对称设置在船体10的两侧,即
在无人船上设置两个救生圈4,且救生圈4与船体10之间设有用于连接两者的连接件(图中未示出),例如连接件可采用连接绳或钢索等,这样在落水者套上救生圈后可随无人船一起进行移动;推进器11对称设置在船体10的后端两侧,推进器11可以控制无人船的前进和后退,还可以通过控制两个推进器产生不同的推力,从而达到控制无人船转弯的目的;激光雷达12分别设于船体10前端和两侧,能够扫描到障碍物、河岸或者落水者的位置等;摄像头13设于船体10的上端前侧,摄像头13为360
°
全景摄像头,能够对无人船四周的水面进行实时拍摄,可检测到各个方位的人员,识别垃圾与障碍物等;gps天线14设于船体10的上端并位于摄像头13的后侧,用于对无人船的工作位置进行定位;声光报警器15设于船体10的上端并位于gps天线14的后侧,用于在无人船工作过程中起到安全警示的功能;照明灯16设于船体10的上端并位于声光报警器15的一侧,该照明灯可采用单方向的照明灯,为无人船的前方提供照明,也可采用多方向的照明灯,为无人船的四周提供照明,从而使无人船可在晚上进行使用;通信天线17设于船体10的上端后侧,用于发出或者接收无线信号,进而可通过后台对无人船进行控制。
54.本实施例中,无人船还包括中央控制模块和电池(图中未画出),中央控制模块和电池设于船体10内,且推进器10、gps天线14、激光雷达12、通信天线17、声光报警器15、摄像头13、照明灯16和电池均与中央控制模块电连接(如图7所示),利用电池为整个无人船的工作提供能源,利用中央控制模块来控制整个无人船各部件之间的协调工作。
55.上述中,通过通信天线与外部的移动控制端或电脑控制端进行通信连接,而后通过外部的移动控制端或电脑控制端设置无人船在某一水域内进行巡航,当有人靠近水域岸边时,无人船通过摄像头发现靠近岸边的人,将信号返回给中央控制模块,而后中央控制模块控制声光报警器开始闪烁及语言喊话,警示岸边人员注意落水危险,当岸边人员远离水域后,声光报警停止,无人船继续巡航;当有人落水时,无人船通过摄像头发现落水人员,通过摄像头和激光雷达共同判断落水人员的距离和方位,而后通过中央控制模块控制推进器工作,使无人船全速冲向落水人员处,同时,中央控制模块向后台管理系统(即移动控制端或电脑控制端)发出警告信息,通过摄像头实时传输当前水面画面到后台管理界面;无人船通过摄像头、激光雷达感知落水人员情况,中央控制模块控制无人船接近落水人员后,根据所需救援的人数,通过舵机驱动摇臂转动,将一侧或两侧的救生圈自主放入水中对落水者进行救援,而后通过摄像头和激光雷达判断出落水人员获取救生圈后,无人船带动救生圈和落水者自主返回到预设的码头处;本实施例中无人船可首先预防水边人员靠近岸边,防止落水,极大的保证了水域附近的人员安全,当发生人员落水后,也可以第一时间实施救援,节约了宝贵的救援时间。
56.本实施例中,无人船还包括防撞装置,防撞装置对称设置在船体的后端两侧并位于推进器11的上方,防撞装置包括向外倾斜设置的固定架18以及转动设于固定架18上的防撞轮19,通过设计的防撞轮可防止无人船在工作过程中船体触碰到异物以及在靠岸过程中船体触碰到岸边对船体造成损伤。
57.具体的,推进器11的外部设有保护网罩20,保护网罩20设置在推进器11的周围,能够防止无人船在行进过程中有杂物意外卷入推进器11内造成推进器11的损坏。
58.具体的,在船体10底部的左右两端均设有船体保护杠21,船体保护杠21对船体1起到保护作用,当船体10在水面工作中意外撞击到水下的暗礁等障碍物时,船体保护杠21能
够保护船体10不受撞击而造成损坏。
59.其它实施例中,通信天线有三个,分别为2.4g天线、4g天线和5g天线,不同频段的天线可用于接收遥控器发出的指令或接收手机端app发出的指令,进而传输到中央控制模块,可通过中央控制模块控制无人船按照人工遥控发出的工作指令开始工作,或者按照手机端app发出的工作指令自主巡航工作,当无人船完成手机端app发出的工作指令后,无人船会自动返回到起点。
60.以上对本实用新型实施例所提供的技术方案进行了详细介绍,本文中应用了具体个例对本实用新型实施例的原理以及实施方式进行了阐述,以上实施例的说明只适用于帮助理解本实用新型实施例的原理;同时,对于本领域的一般技术人员,依据本实用新型实施例,在具体实施方式以及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本实用新型的限制。