1.本发明属于救生设备技术领域,涉及一种水上救生无人机。
背景技术:
2.水上救生是指人们在水上活动时发生意外事故时所采取的救助措施,分为静水救生和海浪救生,水上救生关乎人们生命安全。
3.目前的水上救生救援仅仅局限于靠人力和一些简单的器械下水去搜救溺水者,上述现有技术方案不仅耗费时间较长,效率较低,而且还无法保障救援人员的人身安全,甚至有时出现救援人员与溺水者双双丧命的情况。
技术实现要素:
4.本发明的目的是针对现有的技术存在上述问题,提出了一种水上救生无人机,本发明将救生圈快速投放至落水者周围,提高救生效率,安全可靠。
5.本发明的目的可通过下列技术方案来实现:
6.一种水上救生无人机,包括:无人机本体,所述无人机本体的四周连接有四个延伸板,所述无人机本体内设有蓄电池和控制系统,所述无人机本体的下侧面转动设置有红外摄像头,所述红外摄像头与控制系统电连接;
7.四个驱动机构,四个所述驱动机构和四个延伸板一一对应,所述驱动机构设置在相对应的延伸板上,所述驱动机构具有:固定管,所述固定管竖直固设在延伸板的下侧面上;固定圆管,所述固定圆管通过若干个固定杆同轴固设在相对应的固定管下端外侧;第一转轴,所述第一转轴同轴转动设置在固定管内,所述第一转轴的下端延伸至固定圆管内且端部沿周向设有若干个转叶板;圆环板,所述圆环板同轴固设在固定管的上端边沿;救生圈,所述救生圈通过限位机构同轴套设在固定管的外侧,所述限位机构能够向下释放救生圈;第一电机,所述第一电机固设在延伸板上,所述第一电机与第一转轴传动连接,所述第一电机与蓄电池电连接。
8.在上述的一种水上救生无人机中,所述限位机构包括:
9.若干个限位结构,若干个所述限位结构沿周向设置在圆环板上,所述限位结构具有:第一夹紧板和第二夹紧板,所述第一夹紧板和第二夹紧板分别通过第一固定板和第二固定板转动设置在圆环板的下侧面上,所述第一夹紧板和第二夹紧板的相对侧面上分别开设有第一弧形缺口和第二弧形缺口,所述第一弧形缺口和第二弧形缺口分别接触救生圈的内外侧;活动板,所述活动板上下滑动设置在圆环板的上方;第一传动结构,所述第一传动结构设置在活动板上,所述第一传动结构能够利用活动板的上下滑动带动第一夹紧板转动;第二传动结构,所述第二传动结构设置在活动板上,所述第二传动结构能够利用活动板的上下滑动带动第二夹紧板转动;
10.第一驱动机构,所述第一驱动机构设置在圆环板上,所述第一驱动机构能够带动若干个活动板同时上下滑动。
11.在上述的一种水上救生无人机中,所述第一传动结构包括:
12.第一滑杆,所述圆环板上开设有第一穿孔,所述第一滑杆竖直滑动设置在第一穿孔内,所述第一滑杆的上端与活动板的下侧面固连,所述第一滑杆的下端延伸至圆环板的下方;
13.第一齿条,所述第一齿条沿长度方向固设在第一滑杆上;
14.第二齿轮,所述第二齿轮固设在第一夹紧板远离第一固定板的一侧,所述第二齿轮和第一齿条啮合连接。
15.在上述的一种水上救生无人机中,所述第二传动结构包括:
16.第二滑杆,所述圆环板上开设有第二穿孔,所述第二滑杆竖直滑动设置在第二穿孔内,所述第二滑杆的上端与活动板的下侧面固连,所述第二滑杆的下端延伸至圆环板的下方;
17.第二齿条,所述第二齿条沿长度方向固设在第二滑杆上;
18.第三齿轮,所述第三齿轮固设在第二夹紧板远离第二固定板的一侧,所述第三齿轮和第二齿条啮合连接。
19.在上述的一种水上救生无人机中,所述第一驱动机构包括:
20.转动圆管,所述转动圆管同轴转动设置在圆环板的上侧面上;
21.驱动结构,所述驱动结构设置在转动圆管上,所述驱动结构能够带动转动圆管转动;
22.若干个连动结构,若干个所述连动结构沿周向设置在圆环板上,若干个所述连动结构和若干个活动板一一对应,当转动圆管往复转动时,所述连动结构能够带动相对应的活动板上下滑动。
23.在上述的一种水上救生无人机中,所述驱动结构包括:
24.齿圈,所述齿圈同轴固设在转动圆管内侧壁的上端;
25.第二电机,所述第二电机固设在延伸板的下侧面上,所述第二电机的输出轴固设有第一齿轮,所述第一齿轮和齿圈啮合连接,所述第二电机与蓄电池电连接。
26.在上述的一种水上救生无人机中,所述连动结构包括:
27.支撑板,所述支撑板竖直固设在圆环板上,所述支撑板上水平固设有水平板;
28.第一定滑轮和第二定滑轮,所述第一定滑轮和第二定滑轮分别转动设置在水平板的下侧面上,所述第一定滑轮的轴向呈水平状态,所述第二定滑轮的轴向呈竖直状态;
29.拉绳,所述拉绳的一端固连在活动板的上侧面上,另一端依次绕过第一定滑轮和第二定滑轮且端部与转动圆管的外侧壁固连;
30.复位弹簧,所述复位弹簧的两端固连在活动板和圆环板之间。
31.在上述的一种水上救生无人机中,其中一个延伸板上设有搜救灯,所述搜救灯与蓄电池电连接。
32.在上述的一种水上救生无人机中,两个相对的延伸板的下方分别通过连接板对称固设有浮块,所述浮块的一端设有螺旋浆推进器。
33.在上述的一种水上救生无人机中,所述无人机本体的上侧面设有太阳能电池板,所述太阳能电池板呈球面状,所述太阳能电池板与蓄电池电连接。
34.与现有技术相比,本发明具有以下优点:
35.1、当水上出现落水者后,启动第一电机,带动转叶板转动,使无人机飞行至落水者周围,然后向下靠近落水者,打开限位机构,向下释放救生圈,使落水者可以快速抓住救生圈获救,缩短救援时间,提高救生效率,红外摄像头可以帮助无人机在晚上进行搜救任务,提高利用率;此外,无人机本体上同时携带四个救生圈,可以进行多点投放,增加救援人数;
36.2、初始状态,若干个活动板均远离圆环板的上侧面,通过第一夹紧板的第一弧形缺口和第二夹紧板的第二弧形缺口将救生圈固定在固定圆管的外侧,避免无人机飞行时,救生圈意外掉落,当无人机达到落水者周围时,启动第一驱动机构,使若干个活动板同时向下滑动,通过第一传动结构和第二传动结构带动第一夹紧板和第二夹紧板相背转动,释放救生圈,实现快速救援;
37.3、当需要释放救生圈时,通过第一驱动机构带动活动板向下滑动,使第一滑杆和第一齿条同时向下滑动,第一齿条带动第二齿轮顺时针转动,使第一夹紧板向远离救生圈的方向转动,结构简单;
38.4、当需要释放救生圈时,通过第一驱动机构带动活动板向下滑动,使第二滑杆和第二齿条同时向下滑动,第二齿条带动第三齿轮逆时针转动,使第二夹紧板向远离救生圈的方向转动,结构简单;
39.5、启动驱动结构带动转动圆管逆时针转动,然后通过若干个连动结构带动若干个活动板同时向上滑动,使第一夹紧板和第二夹紧板相向转动,将救生圈夹紧,启动驱动结构带动转动圆管顺时针转动,然后通过若干个连动结构带动若干个活动板同时向下滑动,使第一夹紧板和第二夹紧板相背转动,释放救生圈,操作简单;
40.6、启动第二电机,带动第一齿轮逆时针转动,使转动圆管跟着逆时针转动,第一夹紧板和第二夹紧板相向转动将救生圈夹紧,通过第二电机带动第一齿轮顺时针转动,使转动圆管跟着顺时针转动,第一夹紧板和第二夹紧板相背转动释放救生圈,结构简单;
41.7、当转动圆管逆时针转动时,拉动拉绳抬升活动板,此时复位弹簧被拉伸长,当转动圆管顺时针转动时,拉绳失去向上的拉力,在复位弹簧的作用下,拉动活动板向下滑动,拉绳回到初始位置;此外,第一定滑轮和第二定滑轮可以限定拉绳的走向,避免拉绳发生偏移;
42.8、利用无人机救生时,启动搜救灯,及时发现落水者,提高救援速度;
43.9、无人机通过两个浮块可以漂浮在水面上,通过螺旋浆推进器推动无人机本体在水面上移动,靠近落水者后再释放救生圈,使落水者可以及时抓住救生圈,提高救援的成功率;
44.10、当蓄电池电量不足时,可以利用太阳能电池板进行发电,然后通过太阳能充放电控制器储存至蓄电池内,提高无人机的续航能力。
附图说明
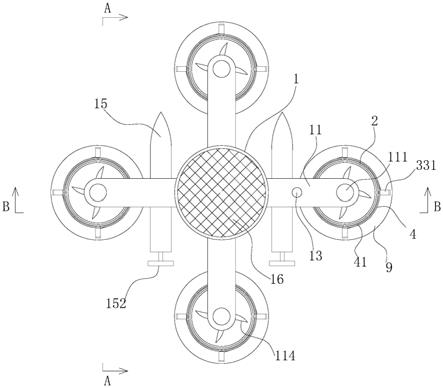
45.图1是本发明的结构示意图;
46.图2是图1中a-a处的剖视图;
47.图3是图1中b-b处的剖视图;
48.图4是图3中c处的局部放大图。
49.图中,1、无人机本体;11、延伸板;111、第一电机;112、固定管;113、第一转轴;114、
转叶板;12、安装腔;121、蓄电池;122、控制系统;13、搜救灯;14、红外摄像头;15、浮块;151、连接板;152、螺旋浆推进器;16、太阳能电池板;2、固定圆管;21、固定杆;3、圆环板;31、第一穿孔;32、第二穿孔;33、支撑板;331、水平板;34、第一定滑轮;35、第二定滑轮;4、转动圆管;41、齿圈;42、第二电机;421、第一齿轮;5、第一夹紧板;51、第一固定板;52、第二齿轮;53、第一弧形缺口;6、第二夹紧板;61、第二固定板;62、第三齿轮;63、第二弧形缺口;7、活动板;71、第一滑杆;711、第一齿条;72、第二滑杆;721、第二齿条;73、复位弹簧;8、拉绳;9、救生圈。
具体实施方式
50.以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
51.如图1至4所示,一种水上救生无人机,包括无人机本体1和四个驱动机构。
52.所述无人机本体1的四周间隔均匀地连接有四个延伸板11,所述无人机本体1内设有蓄电池121和控制系统122,所述无人机本体1的下侧面转动设置有红外摄像头14,所述红外摄像头14与控制系统122电连接。
53.四个所述驱动机构和四个延伸板11一一对应,所述驱动机构设置在相对应的延伸板11上,所述驱动机构包括固定管112、固定圆管2、第一转轴113、圆环板3、救生圈9和第一电机111。
54.所述固定管112竖直固设在延伸板11的下侧面上。
55.所述固定圆管2通过若干个固定杆21同轴固设在相对应的固定管112下端外侧。
56.所述第一转轴113同轴转动设置在固定管112内,所述第一转轴113的下端延伸至固定圆管2内且端部沿周向设有若干个转叶板114。
57.所述圆环板3同轴固设在固定管2的上端边沿。
58.所述救生圈9通过限位机构同轴套设在固定管2的外侧,所述限位机构能够向下释放救生圈9。
59.所述第一电机111固设在延伸板11上,所述第一转轴113的上端穿出延伸板11且端部与第一电机111的输出轴固连,所述第一电机111与蓄电池121电连接。
60.当水上出现落水者后,启动第一电机111,带动转叶板114转动,使无人机飞行至落水者周围,然后向下靠近落水者,打开限位机构,向下释放救生圈9,使落水者可以快速抓住救生圈9获救,缩短救援时间,提高救生效率,红外摄像头14可以帮助无人机在晚上进行搜救任务,提高利用率;此外,无人机本体1上同时携带四个救生圈9,可以进行多点投放,增加救援人数。
61.具体来说,所述限位机构包括若干个限位结构和第一驱动机构。
62.若干个所述限位结构沿周向设置在圆环板3上,所述限位结构包括第一夹紧板5、第二夹紧板6、活动板7、第一传动结构和第二传动结构。
63.所述第一夹紧板5和第二夹紧板6分别通过第一固定板51和第二固定板61转动设置在圆环板3的下侧面上,所述第一夹紧板5和第二夹紧板6的相对侧面上分别开设有第一弧形缺口53和第二弧形缺口63,所述第一弧形缺口53和第二弧形缺口63分别接触救生圈9的内外侧,优选地,所述第一弧形缺口53和第二弧形缺口63与救生圈9的侧面相匹配。
64.所述活动板7上下滑动设置在圆环板3的上方。
65.所述第一传动结构设置在活动板7上,所述第一传动结构能够利用活动板7的上下滑动带动第一夹紧板5转动。
66.所述第二传动结构设置在活动板7上,所述第二传动结构能够利用活动板7的上下滑动带动第二夹紧板6转动。
67.所述第一驱动机构设置在圆环板3上,所述第一驱动机构能够带动若干个活动板7同时上下滑动。
68.初始状态,若干个活动板7均远离圆环板3的上侧面,通过第一夹紧板5的第一弧形缺口53和第二夹紧板6的第二弧形缺口63将救生圈9固定在固定圆管2的外侧,避免无人机飞行时,救生圈9意外掉落,当无人机达到落水者周围时,启动第一驱动机构,使若干个活动板7同时向下滑动,通过第一传动结构和第二传动结构带动第一夹紧板5和第二夹紧板6相背转动,释放救生圈9,实现快速救援。
69.具体来说,所述第一传动结构包括第一滑杆71、第一齿条711和第二齿轮52。
70.所述圆环板3上开设有第一穿孔31,所述第一滑杆71竖直滑动设置在第一穿孔31内,所述第一滑杆71的上端与活动板7的下侧面固连,所述第一滑杆71的下端延伸至圆环板3的下方。
71.所述第一齿条711沿长度方向固设在第一滑杆71上。
72.所述第二齿轮52固设在第一夹紧板5远离第一固定板51的一侧,所述第二齿轮52和第一齿条711啮合连接。
73.当需要释放救生圈9时,通过第一驱动机构带动活动板7向下滑动,使第一滑杆71和第一齿条711同时向下滑动,第一齿条711带动第二齿轮52顺时针转动,使第一夹紧板5向远离救生圈9的方向转动,结构简单。
74.具体来说,所述第二传动结构包括第二滑杆72、第二齿条721和第三齿轮62。
75.所述圆环板3上开设有第二穿孔32,所述第二滑杆72竖直滑动设置在第二穿孔32内,所述第二滑杆72的上端与活动板7的下侧面固连,所述第二滑杆72的下端延伸至圆环板3的下方。
76.所述第二齿条721沿长度方向固设在第二滑杆72上。
77.所述第三齿轮62固设在第二夹紧板6远离第二固定板61的一侧,所述第三齿轮62和第二齿条721啮合连接。
78.当需要释放救生圈9时,通过第一驱动机构带动活动板7向下滑动,使第二滑杆72和第二齿条721同时向下滑动,第二齿条721带动第三齿轮62逆时针转动,使第二夹紧板6向远离救生圈9的方向转动,结构简单。
79.具体来说,所述第一驱动机构包括转动圆管4、驱动结构和若干个连动结构。
80.所述转动圆管4同轴转动设置在圆环板3的上侧面上。
81.所述驱动结构设置在转动圆管4上,所述驱动结构能够带动转动圆管4转动。
82.若干个所述连动结构沿周向设置在圆环板3上,若干个所述连动结构和若干个活动板7一一对应,当转动圆管4往复转动时,所述连动结构能够带动相对应的活动板7上下滑动。
83.启动驱动结构带动转动圆管4逆时针转动,然后通过若干个连动结构带动若干个
活动板7同时向上滑动,使第一夹紧板5和第二夹紧板6相向转动,将救生圈9夹紧,启动驱动结构带动转动圆管4顺时针转动,然后通过若干个连动结构带动若干个活动板7同时向下滑动,使第一夹紧板5和第二夹紧板6相背转动,释放救生圈9,操作简单。
84.具体来说,所述驱动结构包括齿圈41和第二电机42。
85.所述齿圈41同轴固设在转动圆管4内侧壁的上端。
86.所述第二电机42固设在延伸板11的下侧面上,所述第二电机42的输出轴固设有第一齿轮421,所述第一齿轮421和齿圈41啮合连接,所述第二电机42与蓄电池121电连接。
87.启动第二电机42,带动第一齿轮421逆时针转动,使转动圆管4跟着逆时针转动,第一夹紧板5和第二夹紧板6相向转动将救生圈9夹紧,通过第二电机42带动第一齿轮421顺时针转动,使转动圆管4跟着顺时针转动,第一夹紧板5和第二夹紧板6相背转动释放救生圈9,结构简单。
88.具体来说,所述连动结构包括支撑板33、第一定滑轮34、第二定滑轮35、拉绳8和复位弹簧73。
89.所述支撑板33竖直固设在圆环板3上,所述支撑板33上水平固设有水平板331。
90.所述第一定滑轮34和第二定滑轮35分别转动设置在水平板331的下侧面上,所述第一定滑轮34的轴向呈水平状态,所述第二定滑轮35的轴向呈竖直状态。
91.所述拉绳8的一端固连在活动板7的上侧面上,另一端依次绕过第一定滑轮34和第二定滑轮35且端部与转动圆管4的外侧壁固连。
92.所述复位弹簧73的两端固连在活动板7和圆环板3之间。
93.当转动圆管4逆时针转动时,拉动拉绳8抬升活动板7,此时复位弹簧73被拉伸长,当转动圆管4顺时针转动时,拉绳8失去向上的拉力,在复位弹簧73的作用下,拉动活动板7向下滑动,拉绳8回到初始位置;此外,第一定滑轮34和第二定滑轮35可以限定拉绳8的走向,避免拉绳8发生偏移。
94.具体来说,其中一个延伸板11上设有搜救灯13,所述搜救灯11与蓄电池121电连接。
95.利用无人机救生时,启动搜救灯13,及时发现落水者,提高救援速度。
96.具体来说,两个相对的延伸板11的下方分别通过连接板151对称固设有浮块15,所述浮块15的一端设有螺旋浆推进器152。
97.无人机通过两个浮块15可以漂浮在水面上,通过螺旋浆推进器152推动无人机本体1在水面上移动,靠近落水者后再释放救生圈9,使落水者可以及时抓住救生圈9,提高救援的成功率。
98.具体来说,所述无人机本体1的上侧面设有太阳能电池板16,所述太阳能电池板16呈球面状,所述太阳能电池板16与蓄电池121电连接。
99.当蓄电池121电量不足时,可以利用太阳能电池板16进行发电,然后通过太阳能充放电控制器储存至蓄电池121内,提高无人机的续航能力。
100.在本专利的描述中,需要理解的是,术语“上”、“下”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本专利和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本专利的限制。
101.本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。