1.本实用新型涉及水中作业设备技术领域,尤其是一种用于收放无人艇的吊篮。
背景技术:
2.无人艇是一种水中作业机器人,多数装备在母船上,无人艇的收放、操控都依靠遥控指令实现,难以采用传统小艇的手动挂钩脱钩方式进行收放。
3.目前,无人艇的收放通常采用机器爪抓取、纵向倾斜冲排式滑道的方法。其中,机器爪抓取对机器爪的可靠程度、抓取的力度都有很高的要求,而且机器爪与无人艇之间的接触面积相对较小,稳定性相对较低;
4.而纵向倾斜冲排式滑道对无人艇的运动速度、自重都有要求,需要无人艇自身冲上滑道,如果无人艇不能一次性冲上滑道,后续还需要其他辅助。
技术实现要素:
5.本技术人针对上述现有生产技术中的缺点,提供一种结构合理的用于收放无人艇的吊篮,无需无人艇斜向上运动,只需无人艇在水中运动至吊篮处,即可通过升降吊篮,实现稳定可靠地收起无人艇。
6.本实用新型所采用的技术方案如下:
7.一种用于收放无人艇的吊篮,包括吊篮框架,所述吊篮框架顶部设有吊环,吊篮框架内设有艏部搁架和尾部搁架,
8.所述艏部搁架和尾部搁架分别位于吊篮框架的两个相对端面处,
9.所述艏部搁架包括与吊篮框架相连的艏部支撑杆组、位于艏部支撑杆组中间的第一凹形托架,
10.所述尾部搁架包括与吊篮框架相连的尾部支撑杆组、位于尾部支撑杆组中间的第二凹形托架,
11.所述第一凹形托架用于承托无人艇的船艏,第二凹形托架用于承托无人艇的船尾。
12.所述艏部支撑杆组包括垂直于吊篮框架侧壁的第一横杆、连接于第一横杆背离吊篮框架侧壁的第一竖杆,两第一竖杆的顶部相对延伸出第一斜杆,第一斜杆自第一竖杆顶部向吊篮框架底部延伸,两侧第一斜杆组成“v”形凹陷。
13.所述第一竖杆的顶端高度超出第一横杆的竖直高度设置。
14.所述所述第一凹形托架的下凹顶点与吊篮框架之间连接有第一承托杆。
15.所述尾部支撑杆组件包括垂直于吊篮框架侧壁的第二横杆、连接于第二横杆背离吊篮框架侧壁的第二竖杆,两第二竖杆的顶部相对延伸出第二斜杆,第二斜杆自第二竖杆顶部向吊篮框架底部延伸,两侧第二斜杆组成“v”形凹陷。
16.所述第二斜杆组成的“v”形凹陷位置的下凹顶点处预留有水平段。
17.所述第二竖杆的顶部与第二横杆的端部齐平。
18.如权利要求1所述的一种用于收放无人艇的吊篮,所述第一凹形托架的夹角小于第二凹形托架的夹角。
19.如权利要求1所述的一种用于收放无人艇的吊篮,所述吊篮框架为正方体框架,正方体框架上设置艏部支撑杆组、尾部支撑杆组的竖直面处还设有加强肋,加强肋位于前述两竖直面之间的侧面上。
20.本实用新型的有益效果如下:
21.本实用新型结构紧凑、合理,操作方便,在框型结构的吊篮框架底部设置艏部搁架和尾部搁架,艏部搁架和尾部搁架均设置为“v”形凹陷,两处夹角不同的凹陷位置分别用于承托船艏和船尾的底部,以防无人艇倾斜。
22.本实用新型在使用过程中,只需将吊篮框架下沉至水中,无人艇运动至吊篮框架内,再通过外接吊艇架,勾住吊环将整个吊篮框架提起,即能够将无人艇收起。且由于艏部搁架和尾部搁架的限位,无人艇起吊过程中相对较稳,不易倾斜、碰撞。
附图说明
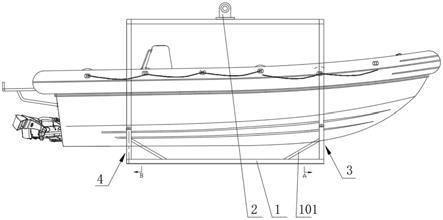
23.图1为本实用新型与无人艇配合使用时的示意图。
24.图2为本实用新型的俯视图。
25.图3为图1的a-a剖视图用于体现艏部搁架的结构。
26.图4为图1的b-b剖视图用于体现尾部搁架的结构。
27.其中:1、吊篮框架;2、吊环;3、艏部搁架;4、尾部搁架;
28.101、加强肋;
29.301、艏部支撑杆组;302、第一凹形托架;303、第一横杆;304、第一竖杆;305、第一斜杆;306、第一承托杆;
30.401、尾部支撑杆组;402、第二凹形托架;403、第二横杆;404、第二竖杆;405、第二斜杆;406、水平段。
具体实施方式
31.下面结合附图,说明本实用新型的具体实施方式。
32.如图1-图4所示,本实施例的用于收放无人艇的吊篮,包括吊篮框架1,吊篮框架1顶部设有吊环2,吊篮框架1内设有艏部搁架3和尾部搁架4,
33.艏部搁架3和尾部搁架4分别位于吊篮框架1的两个相对端面处,
34.艏部搁架3包括与吊篮框架1相连的艏部支撑杆组301、位于艏部支撑杆组301中间的第一凹形托架302,
35.尾部搁架4包括与吊篮框架1相连的尾部支撑杆组401、位于尾部支撑杆组401中间的第二凹形托架402,
36.第一凹形托架302用于承托无人艇的船艏,第二凹形托架402用于承托无人艇的船尾。
37.艏部支撑杆组301包括垂直于吊篮框架1侧壁的第一横杆303、连接于第一横杆303背离吊篮框架1侧壁的第一竖杆304,两第一竖杆304的顶部相对延伸出第一斜杆305,第一斜杆305自第一竖杆304顶部向吊篮框架1底部延伸,两侧第一斜杆305组成“v”形凹陷。
38.第一竖杆304的顶端高度超出第一横杆303的竖直高度设置。
39.第一凹形托架302的下凹顶点与吊篮框架1之间连接有第一承托杆306。
40.尾部支撑杆组401件包括垂直于吊篮框架1侧壁的第二横杆403、连接于第二横杆403背离吊篮框架1侧壁的第二竖杆404,两第二竖杆404的顶部相对延伸出第二斜杆405,第二斜杆405自第二竖杆404顶部向吊篮框架1底部延伸,两侧第二斜杆405组成“v”形凹陷。
41.第二斜杆405组成的“v”形凹陷位置的下凹顶点处预留有水平段406。
42.第二竖杆404的顶部与第二横杆403的端部齐平。
43.第一凹形托架302的夹角小于第二凹形托架402的夹角。
44.吊篮框架1为正方体框架,正方体框架上设置艏部支撑杆组301、尾部支撑杆组401的竖直面处还设有加强肋101,加强肋101位于前述两竖直面之间的侧面上。
45.本实施例的具体结构及工作过程如下:
46.如图1和图2所示,吊篮框架1为立方体框架,在吊篮框架1的两个相对的竖直面处设置艏部搁架3和尾部搁架4。如图1所示,使用吊篮框架1时,无人艇行驶至穿过吊篮框架1,无人艇的艏部、尾部,分别落在艏部搁架3和尾部搁架4上。
47.艏部搁架3的结构如图3所示,包括艏部支撑杆组301和贴附在艏部支撑杆组301的凹陷位置的缓冲层。缓冲层可以采用橡胶等柔性或弹性材质,减小对无人艇的刚性冲击。
48.艏部支撑杆组301包括中间位置形成“v”形凹陷结构的第一竖杆304和第一斜杆305,为了提高整体结构的稳定性,在“v”形凹陷结构的两侧设置与吊篮框架1焊接相连的第一横杆303。第一横杆303的竖直高度低于第一竖杆304的顶端高度,由于第一凹形托架302的夹角较小,因此适当延长第一斜杆305的长度,能够增大与船艏之间的连接长度,从而提高限位的稳定性。
49.如图4所示,为本实用新型中的尾部搁架4的结构示意图。与艏部搁架3不同的是,尾部搁架4的第二凹形托架402的夹角更大,为钝角,且第二凹形托架402的凹陷顶点处水平设置,目的是为了契合船尾的轮廓。船尾轮廓比船艏轮廓的尺寸更大,需要平坦度更平的结构来限位。
50.本实用新型在使用时,无人艇放在吊篮框架1中,吊篮框架1下放到水中,通过遥控指令,无人艇开航,离开吊篮框架1;返航时,无人艇靠近母船,吊篮框架1下放到水中,控制台发布吊篮框架1的位置,规划无人艇驶入吊篮框架1内,外界吊艇将吊篮提升,实现无人艇的回收。
51.以上描述是对本实用新型的解释,不是对实用新型的限定,本实用新型所限定的范围参见权利要求,在本实用新型的保护范围之内,可以作任何形式的修改。