1.本实用新型涉及船舶控制领域,尤其涉及一种船舶混合动力系统的多模式切换控制装置。
背景技术:
2.采用混合动力系统的船舶能够提高动力系统的燃油利用率,同时能够满足某些场合下污染“零排放”的需求。因此越来越多的船舶开始装配混合动力系统。
3.现有技术中的混合动力系统的模式切换装置仅采用单芯片控制,因此,在面对芯片的突发故障时无法保证船舶的正常控制,且船舶在模式切换过程中十分繁琐,用户无法直观、全面地查看混合动力系统中各个设备的工作状态。同时,部分设备需要用户的手动操作,这样会降低船舶模式切换的效率,且在模式切换过程中故障报警系统仅能进行简单报警,无法对故障设备进行定位。
4.因此,有必要提出一种船舶混合动力系统的多模式切换控制装置,以克服上述缺陷。
技术实现要素:
5.本实用新型的目的在于,提供一种船舶混合动力系统的多模式切换控制装置,以解决船舶切换模式流程繁琐、用户无法实时查看外部设备工作状态的问题。
6.为解决上述技术问题,本实用新型实施例提供了一种船舶的控制装置,包括:主控模块,用以发送控制指令至外部设备,以切换所述船舶至不同的工作模式;以及显示模组,与所述主控模块相连,用以显示所述主控模块所提供的工作模式和用以显示所述船舶的当前工作状态,以及用以显示外部设备的故障器件。
7.进一步地,所述主控模块包括:模式切换单元,用以输出所述船舶的不同的工作模式,其中所述工作模式包括一机双桨模式和双机双桨模式。
8.进一步地,所述主控模块还包括:模式切换判断单元,与所述模式切换单元相连,用以判断与所述控制装置相连的外部设备的当前工作状态是否满足模式切换条件。
9.进一步地,所述主控模块包括:工作模式识别单元,用以实时检测所述外部设备的当前工作状态;以及工作模式输出单元,与所述工作模式识别单元相连,用以根据外部设备的当前工作状态,输出不同的工作模式。
10.进一步地,所述控制装置还包括变频器,所述变频器分别与所述主控模块和所述外部设备相连,用以调整输出至外部设备的输出电压、输出电流与输出频率。
11.进一步地,所述控制装置还包括电源模块,所述电源模块用以给所述控制装置供电。
12.进一步地,所述电源模块包括主电源、备用电源以及电源冗余单元;所述电源冗余单元分别与所述主电源和所述备用电源连接,所述电源冗余单元用以电源滤波以及所述主电源与所述备用电源之间的无缝切换。
13.进一步地,所述主电源为交流电源或直流电源,所述备用电源为直流电源或直流电源。
14.进一步地,所述主控模块为可编程逻辑控制器,所述可编程逻辑控制器包括:切换器、与所述切换器相连的主处理器、与所述切换器相连的备用处理器、与所述切换器相连的通讯单元、与所述切换器相连的输入/输出模块,所述切换器用以无缝切换所述主处理器和所述备用处理器。
15.进一步地,所述通讯单元包括交换机,所述交换机通讯连接至外部设备以及所述显示模组,用以发送相应指令至所述外部设备和用以通过所述显示模组输出所述外部设备的实时状态。
16.进一步地,所述通讯单元还包括通讯模块,所述通讯模块通讯连接至外部设备以及所述显示模组,用以发送相应指令至所述外部设备和用以通过所述显示模组输出所述外部设备的实时状态。
17.进一步地,所述控制装置还包括采集模块,所述采集模块分别与外部设备和输入/输出模块相连,用以采集并扩展外部设备的工作参数。
18.进一步地,所述控制装置还包括语音控制模块,所述语音控制模块分别与外部设备和通讯模块相连,用以接收语音播放指令并反馈状态。
19.本实用新型实施例提供了一种船舶混合动力系统的多模式切换控制装置,所述控制装置通过主控模块完成自动化模式切换,以解决船舶切换模式流程繁琐的问题。此外,所述控制装置通过显示模组为用户显示外部设备的实时工作状态,以解决外部设备的工作状态无法实时显示给用户的问题。
附图说明
20.下面结合附图,通过对本实用新型的具体实施方式详细描述,将使本实用新型的技术方案及其它有益效果显而易见。
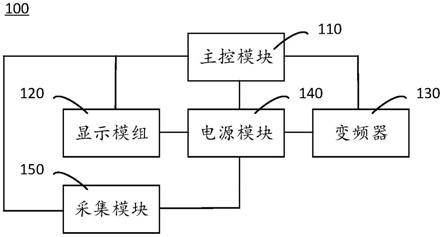
21.图1为本实用新型一实施例所提供的一种船舶混合动力系统的多模式切换控制装置的结构示意图。
22.图2为图1所提供的所述主控模块的结构示意图。
23.图3为图1所提供的所述显示模组的结构示意图。
24.图4为图2所提供的所述通讯单元的结构示意图。
25.图5为图1所提供的所述电源模块的结构示意图。
26.图6为本实用新型提供的控制装置的使用状态示意图。
27.附图标记说明:
28.附图标记
ꢀꢀ
部件名称
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
附图标记
ꢀꢀꢀ
部件名称
29.100
ꢀꢀꢀꢀꢀꢀꢀ
控制装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
110
ꢀꢀꢀꢀꢀꢀꢀꢀ
主控模块
30.120
ꢀꢀꢀꢀꢀꢀꢀ
显示模组
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
130
ꢀꢀꢀꢀꢀꢀꢀꢀ
变频器
31.140
ꢀꢀꢀꢀꢀꢀꢀ
电源模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
150
ꢀꢀꢀꢀꢀꢀꢀꢀ
采集模块
32.111
ꢀꢀꢀꢀꢀꢀꢀ
切换器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
112
ꢀꢀꢀꢀꢀꢀꢀꢀ
主处理器
33.113
ꢀꢀꢀꢀꢀꢀꢀ
备用处理器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
114
ꢀꢀꢀꢀꢀꢀꢀꢀ
通讯单元
34.115
ꢀꢀꢀꢀꢀꢀꢀ
输入/输出模块
ꢀꢀꢀꢀꢀꢀ
121
ꢀꢀꢀꢀꢀꢀꢀꢀ
显示面板
35.122
ꢀꢀꢀꢀꢀꢀꢀ
语音控制模块
ꢀꢀꢀꢀꢀꢀꢀ
123
ꢀꢀꢀꢀꢀꢀꢀꢀ
操作装置
36.141
ꢀꢀꢀꢀꢀꢀꢀ
主电源
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
142
ꢀꢀꢀꢀꢀꢀꢀꢀ
备用电源
37.143
ꢀꢀꢀꢀꢀꢀꢀ
电源冗余单元
ꢀꢀꢀꢀꢀꢀꢀ
1141
ꢀꢀꢀꢀꢀꢀꢀ
交换机
38.1142
ꢀꢀꢀꢀꢀꢀ
通讯模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1143
ꢀꢀꢀꢀꢀꢀꢀ
串行通讯模块。
具体实施方式
39.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
40.参阅图1所示,本实施例提供了一种船舶混合动力系统的多模式切换控制装置100,包括主控模块110、与主控模块相连的显示模组120。
41.主控模块110用以发送控制指令至外部设备,以切换所述船舶至不同的工作模式。显示模组120,与主控模块110相连,用以显示主控模块110所提供的工作模式和/或用以显示所述船舶的当前工作状态,以及用以显示外部设备的故障器件。示例性地,本实施例所述外部设备包括:齿轮箱、轴带电机、配电板等。示例性地,主控模块110可选为可编程逻辑控制器,参阅图2所示,所述可编程逻辑控制器包括:切换器111、与切换器111相连的主处理器112、与切换器111相连的备用处理器113、与切换器111相连的通讯单元114、与切换器111相连的输入/输出模块115,所述切换器111用以主处理器112与备用处理器113之间的无缝切换。在本实施例中,切换器111分别与主处理器112以及备用处理器113相连。当主处理器112正常工作时,主处理器112和备用处理器113获得的外部设备的实时数据是相同的。当控制装置100检测到主处理器112故障时,备用处理器113接管主处理器112的控制权限,切换器111断开与主处理器112的连接,以提高控制装置100的稳定性。示例性地,切换器111可以是并联式,即主处理器112与备用处理器113为并联设置。
42.参阅图3所示,可选地,显示模组120包括显示面板121、语音控制模块122、操作装置123。可选地,控制装置可设有多个显示面板121、多个语音控制模块122、多个操作装置123。可选地,显示面板121为可触控显示面板,用以用户输入指令。具体地,语音控制模块122分别与外部设备和通讯模块相连,用以接收语音播放指令并反馈状态。例如:语音控制模块可输出外部设备异常语音提示、控制装置异常语音提示等。操作装置123用以辅助显示面板121的指令输入功能。具体地,操作装置123包括“模式切换”旋钮以及“确认/复位”按钮。在同一时间,仅有一个显示面板输出的控制指令为有效,从而保证控制指令的一致性。本实施例提供的控制装置通过显示面板121将外部设备的实时工作状态显示给用户,使得用户能够实时了解外部设备的工作状态,进而降低用户模式切换流程的难度。可选地,显示面板121能够根据外部设备的实时工作状态输出参考模式。
43.参阅图4所示,通讯单元114包括交换机1141,交换机1141通讯连接(例如:通过以太网连接)至外部设备以及显示模组120,用以发送相应指令至外部设备和/或用以通过显示模组120输出所述外部设备的实时状态。进一步地,通讯单元114还包括通讯模块1142,通讯模块1142连接(可选为有线连接)至外部设备以及显示模组120,用以发送相应指令至外部设备和/或用以通过所述显示模组输出所述外部设备的实时状态。进一步地,通讯单元
114还包括串行通讯器1143。具体地,语音控制模块122通过串行通讯模块1143连接至通讯单元114,通讯单元114通过rs485/422通讯接口连接至外部设备。
44.进一步地,主控模块110包括模式切换单元,用以输出所述船舶的不同的工作模式,其中所述工作模式包括一机双桨模式和双机双桨模式。具体地,工作模式可根据实际情况,由厂商预先设置在控制装置100中。可选地,当模式切换单元输出工作模式时,控制装置100可以根据当前故障信号的来源,定位工作异常的外部设备。
45.进一步地,主控模块110还包括工作模式识别单元和工作模式输出单元。
46.工作模式识别单元用以实时检测外部设备的当前工作状态。工作模式输出单元与工作模式识别单元相连,用以根据外部设备的当前工作状态,输出不同的工作模式。
47.进一步地,主控模块100还包括模式切换判断单元,模式切换判断单元与模式切换单元相连,用以判断外部设备的当前工作状态是否满足模式切换条件。模式切换条件可以为联锁条件。具体地,模式切换判断单元通过厂商预设的外部设备联锁条件进行判断。该联锁条件可根据实际情况进行设置,在此不做限定。
48.继续参阅图1所示,控制装置100还包括变频器130,变频器130分别与主控模块110和外部设备相连,用以调整输出至外部设备的输出电压的大小和输出电流的大小、频率,以减缓电路的波动。具体地,变频器通过交流电缆连接至外部设备。
49.控制装置100还包括电源模块140,所述电源模块140与主控模块110相连,用以供电至主控模块110。当然,电源模块140也可以与控制装置的其他模块相连,以提供电能。可选地,控制装置100的部分模块连接至电源模块140,另一部分模块连接至外接电源,以防止当电源模块140为异常状态时,部分模块还可保持正常工作状态。参阅图5所示,电源模块140包括主电源141、备用电源142以及电源冗余单元143。电源冗余单元143分别与主电源141和备用电源142连接,电源冗余单元143用以电源滤波以及主电源141与备用电源142之间的无缝切换。在本实施例中,主电源141可选为交流电源或直流电源,备用电源142可选为直流电源或交流电源。电源冗余单元143具有主电源141与备用电源142之间无缝切换的功能,从而提高电源模块140的稳定性。
50.继续参阅图1所示,控制装置还包括采集模块150,采集模块150分别与外部设备和主控模块110相连,用以采集并扩展外部设备的工作参数。进一步地,采集模块150连接至主控模块110内的输入/输出模块115。
51.参阅图6所示,该图为本实施例提供的控制装置的使用状态示意图。控制装置在使用时可按照图6所示的线路连接方式连接。
52.本实施例提供的船舶混合动力系统的多模式切换控制装置通过主控模块完成自动化模式切换,以解决船舶切换模式流程繁琐的问题。此外,所述控制装置通过显示模组为用户显示外部设备的实时工作状态,以解决外部设备的工作状态无法实时显示给用户的问题。