1.本发明涉及船舶技术领域,尤其是一种船舶姿态自动调整控制方法。
背景技术:
2.船舶姿态主要包括船舶的倾斜状态和吃水状态,对于船舶安全意义重大。目前,船舶在出港前或在航行过程中,只能通过人工在动态倾斜仪的辅助下,对船舶内部的压载舱进行泵水或者排水来调整船舶的倾斜状态和吃水状态,以保证船舶姿态平稳。但是通过人工操作调整船舶姿态的方法不仅耗时耗力,而且容易出现以下问题:(1)船上的压载舱较多时,依靠人工经验无法快速判断出哪些压载舱需要排出水或泵入水能够产生最合理的回复力矩,即会造成人工调整船舶姿态太慢。(2)船舶始终处于晃荡中,尤其吃水过浅或高海况下,依靠人工经验和人工操作容易出现船舶姿态调节不足或过调节的情况,严重的过调节会导致船舶倾覆;且由于船员主观感受、自身经验和技术能力的不同,使得人工船舶姿态的人工调节效率低下。(3)常规的船舶姿态调整方法是人工通过压载泵从海底门向各压载舱泵水,或者通过压载泵从压载舱向外排水,而比较高效的办法是通过压载泵将船体下沉侧压载舱的水打入上浮侧,但限于船员水平和对船的熟悉程度,如此靠人工进行操作具有一定的危险性,容易出现过度调节和调节不当,导致船舶倾覆。
技术实现要素:
3.本发明人针对上述问题及技术需求,提出了一种船舶姿态自动调整控制方法,本发明的技术方案如下:
4.一种船舶姿态自动调整控制方法,该方法包括:
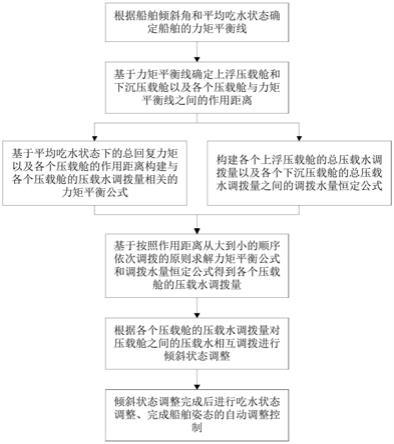
5.根据船舶倾斜角和平均吃水状态确定船舶的力矩平衡线;
6.基于力矩平衡线确定n个处于上浮状态的上浮压载舱和m个处于下沉状态的下沉压载舱以及各个压载舱与力矩平衡线之间的作用距离;
7.基于船舶在平均吃水状态下的总回复力矩m0以及各个压载舱与力矩平衡线之间的作用距离构建与各个压载舱的压载水调拨量相关的力矩平衡公式;
8.构建各个上浮压载舱的总压载水调拨量以及各个下沉压载舱的总压载水调拨量之间的调拨水量恒定公式;
9.基于按照作用距离从大到小的顺序依次调拨的原则求解力矩平衡公式和调拨水量恒定公式得到各个压载舱的压载水调拨量;
10.对压载舱之间的压载水相互调拨、控制各个下沉压载舱按照对应的压载水调拨量排出水,并按照各个上浮压载舱对应的压载水调拨量将其注入到相应的上浮压载舱中进行倾斜状态调整,倾斜状态调整完成后进行吃水状态调整、完成船舶姿态的自动调整控制。
11.本发明的有益技术效果是:
12.本技术公开了一种船舶姿态自动调整控制方法,该方法能够实时监测船舶姿态和每个压载舱的液位状态,根据监测的数据实时评估船舶姿态,并自动控制压载管系中的阀
门和压载泵,,按照自动调整控制方法来实现压载水的泵入、泵出或者船体各压载舱之间的调拨,从而实现船舶自动调平,以及船舶吃水自动调整来实时保证船舶的姿态,有利于船舶安全,有利于保证船舶航行稳定性和人员舒适度,有利于降低船舶油耗,尤其在较小吃水的状态下,这一优点更为显著
13.采用先进行船舶调平,再进行船体吃水调节的两步式的操作控制模式具有以下优势:先进行快速调平,以最快的速度使船舶达到平稳状态,快速实现船舶安全性和人员舒适性,这是首要的;在进行船体吃水状态的调节,以进一步增加船体稳性和抵御风浪的能力。
14.船舶姿态调整实现自动控制,并且更加准确、高效。从而有效弥补了通过人工控制压载水的进出和调拨来调整船舶姿态的不足,避免了调节不足、过度调节以及效率低下,避免了因船员主观感受和自身经验带来的误差,有利于船舶安全,有利于保证船舶航行稳定性和人员舒适度。
附图说明
15.图1是应用本技术的船舶姿态自动调整控制方法的船舶的系统结构图。
16.图2是本技术的船舶姿态自动调整控制方法的方法流程图。
17.图3是本技术的船舶姿态自动调整控制方法确定各个压载舱的压载水调拨量的流程示意图。
具体实施方式
18.下面结合附图对本发明的具体实施方式做进一步说明。
19.本技术公开了一种船舶姿态自动调整控制方法,请方法应用于船舶上,请参考图1所示的示意图,船舶内部设置有若干个压载舱,如图1示出了14个压载舱,各个压载舱一般相对于船舶的船长方向左右对称布置,各个压载舱的布置位置、总舱室容积以及单位液位高度对应的压载水体积都是已知的,可以根据设计阶段提供的《船体舱容计算书》确定压载舱内部液位状态与压载水体积之间的计算关系。
20.每个压载舱内设置有液位传感器1,各个液位传感器1连接到液位遥测系统。每个压载舱的进液口和出液口分别通过控制阀2连接至压载泵3的输入端和输出端。压载泵3的输入端还连接海水总管。压载舱的进液口的控制阀2开启时可以通过压载泵3对压载舱注水,压载舱的出液口的控制阀2开启时可以将水排出至海水总管或压载泵3。各个控制阀2和压载泵3均连接至控制阀和压载泵控制系统,控制阀和压载泵控制系统控制各个控制阀以及压载泵的启停,图1中未示出具体的连接关系。
21.船舶在艏部、艉部以及船中两侧设置有四角吃水传感器4,四角吃水传感器4连接到四角吃水系统。
22.控制阀和压载泵控制系统、液位遥测系统以及四角吃水系统连接到船舶姿态自动调整控制系统,基于上述结构可以实现本技术提供的船舶姿态自动调整控制方法,船舶姿态自动调整控制的整体调整逻辑为:
23.通过四角吃水系统利用四角吃水传感器4可以获取船舶姿态数据,包括船舶倾斜角θ和平均吃水状态h,若船舶倾斜角θ超过预定阈值则进行倾斜状态调整。若平均吃水状态h未达到额定吃水状态,则首先进行倾斜状态调整使得船舶倾斜角θ小于预定阈值,然后进
行吃水状态调整。在吃水状态调整过程中,若监测到船舶倾斜角θ超过预定阈值,则停止吃水状态调整并重新进行倾斜状态调整直至船舶倾斜角θ小于预定阈值后,重新进行吃水状态调整,直至平均吃水状态达到额定吃水状态,最后再进行一次倾斜状态调整,完成船舶姿态的自动调整控制。对各个阶段的过程分别介绍如下:
24.一、倾斜状态调整。本技术通过对压载舱之间的压载水相互调拨的方法来进行倾斜状态调整、实现船舶自动调平,包括如下步骤,请参考图2:
25.1、确定力矩平衡线。根据船舶倾斜角θ和平均吃水状态h确定船舶的力矩平衡线,具体的,通过平均吃水状态h确定船舶的船体浮心,过船体浮心做倾斜角为船舶倾斜角θ的平面a,将平面a与水平面的交线作为力矩平衡线。
26.2、基于力矩平衡线确定各个压载舱的上浮或下沉状态,由此确定n个处于上浮状态的上浮压载舱和m个处于下沉状态的下沉压载舱。具体的对于每个压载舱,根据压载舱的设计参数可以预先知道压载舱的中心点,确定压载舱的中心点与力矩平衡线形成的平面与水平面的夹角α,当夹角α随船舶姿态变化为正数时确定压载舱处于上浮状态,当夹角α随船舶姿态变化为负数时确定压载舱处于下沉状态。
27.该步骤同时还会确定各个压载舱与力矩平衡线之间的作用距离,可以通过计算压载舱的中心点与力矩平衡线的距离来得到作用距离。由于作用距离越大代表单位液体产生的力矩越大,后续在调拨压载水时需要优先考虑,因此为了便于操作,该步骤实际可以直接得到上浮压载舱序列和下沉压载舱序列,其中:
28.上浮压载舱序列中包括处于上浮状态且与力矩平衡线的作用距离依次减小的n个上浮压载舱,上浮压载舱序列中第i个上浮压载舱与力矩平衡线的作用距离记为l
i
、对应的压载水调拨量记为δv
i
,0≤δv
i
≤δv
imax
,δv
imax
是上浮压载舱序列中第i个上浮压载舱的最大压载水调拨量、也是第i个上浮压载舱的压载舱余量体积。通过液位遥测系统利用液位传感器可以确定各个压载舱的液位状态,结合《船体舱容计算书》可以得到压载舱内的压载水体积,每个上浮压载舱的压载舱余量体积即为该上浮压载舱的总舱室容积与压载水体积的差值。
29.下沉压载舱序列中包括处于下沉状态且与力矩平衡线的距离依次减小的m个下沉压载舱,下沉压载舱序列中第j个上浮压载舱与力矩平衡线的作用距离记为l
j
′
、对应的压载水调拨量记为δv
j
′
,0≤δv
j
′
≤δv
j
′
max
,δv
j
′
max
是下沉压载舱序列中第j个下沉压载舱的最大压载水调拨量、也是第j个下沉压载舱内的压载水体积,如上所述压载水体积可以基于液位遥测系统获取的液位状态计算得到。
30.3、基于船舶在平均吃水状态下的总回复力矩m0以及各个压载舱与力矩平衡线之间的作用距离构建与各个压载舱的压载水调拨量相关的力矩平衡公式。其中船舶在平均吃水状态下的总回复力矩m0可以由船舶静水力特性得到,属于已知参数,由此构建得到的力矩平衡公式为
31.4、构建各个上浮压载舱的总压载水调拨量以及各个下沉压载舱的总压载水调拨量之间的调拨水量恒定公式。由于在进行倾斜状态调整时,是对压载舱之间的压载水相互调拨,因此所有上浮压载舱的总压载水调拨量就是总注水量,所有下沉压载舱的总压载水调拨量就是总排水量,总注水量与总排水量相等,也即下沉压载舱排出的水都进入上浮压
载舱,而上浮压载舱注入的水都来自于下沉压载舱,由此构建得到的调拨水量恒定公式为
32.5、基于按照作用距离从大到小的顺序依次调拨的原则求解力矩平衡公式和调拨水量恒定公式得到各个压载舱的压载水调拨量。求得的各个压载舱的压载水调拨量可以大于0也可以等于0,等于0则表示无需对该压载舱进行调拨,因此该方法在执行时,对所有压载舱都做压载水调拨,或者只对部分压载舱做压载水调拨。且上浮压载舱序列中一个上浮压载舱的压载水调拨量达到最大压载水调拨量时、才继续调拨下一个上浮压载舱,同样的,下沉压载舱序列中一个下沉压载舱的压载水调拨量达到最大压载水调拨量时、才继续调拨下一个下沉压载舱。由此,求解得到的各个压载舱的压载水调拨量包括:上浮压载舱序列中前n
‑
1个上浮压载舱的压载水调拨量为对应的压载舱余量体积,第n个上浮压载舱的压载水调拨量δv
n
为实际注入量,其余n
‑
n个上浮压载舱的压载水调拨量为0。下沉压载舱序列中前m
‑
1个下沉压载舱的压载水调拨量为对应的压载水体积,第m个下沉压载舱的压载水调拨量δv
m
′
为实际排出量,其余m
‑
m个下沉压载舱的压载水调拨量为0。前述m、n、δv
m
′
和δv
n
由实际求解得到,且m≤m,n≤n。求解方法包括如下步骤,请参考图3:
33.s1,在将下沉压载舱序列中前p个下沉压载舱中的压载水全部排出、其余m
‑
p个下沉压载舱保持不变的基础上,由确定当前需要对应将上浮压载舱序列中前q个上浮压载舱注水、其余n
‑
q个上浮压载舱保持不变,p为参数且起始值为1。
34.s2,检测是否满足其中
35.s3,若此时则表示驳运不足,令p=p+1并再次执行步骤s1和s2。
36.s4,若此时则表示过度驳运,此时确定m=p,即明确需要对下沉压载舱序列中前m个下沉压载舱进行排水。
37.s5,由确定得到k,得到的该参数k的含义是:下沉压载舱序列中前m
‑
1个下沉压载舱排出的压载水可以填满上浮压载舱序列中前k
‑
1个上浮压载舱、但不能填满前k个上浮压载舱。在此基础上,最复杂的情况是下沉压载舱序列中第m个下沉压载舱排出的压载水按顺序排入上浮压载舱序列中第k+1~第n个上浮压载舱,因此需要满足
38.s6,由此,在的约束条件下,求解得到n、δv
n
和δv
′
m
,由此得到各个压载舱的压载水调拨量。
39.6、对压载舱之间的压载水相互调拨、控制各个下沉压载舱按照对应的压载水调拨量排出水,并按照各个上浮压载舱对应的压载水调拨量将其注入到相应的上浮压载舱中进行倾斜状态调整。
40.在进行倾斜状态调整过程中,控制压载水调拨量大于0的所有压载舱的控制阀同时打开并控制压载泵启动,当通过液位遥测系统检测到压载舱完成排出或注入后关闭对应的控制阀,当所有控制阀关闭时关闭压载泵。由于每个压载舱的压载水调拨量已知,由此可以计算得到调拨完成后的液位状态,通过液位遥测系统利用液位传感器即可检测是否完成排出或注入。
41.二、吃水状态调整。
42.倾斜状态调整完成后进行吃水状态调整,按照如上介绍的过程,最终可以完成船舶姿态的自动调整控制。在进行吃水状态调整时,根据平均吃水状态控制压载舱向舷外排水或从舷外注水进行吃水状态调整,向舷外排水或从舷外注水的压载舱靠近船舶中央位置和/或相对于船舶的船长方向对称。
43.以上所述的仅是本技术的优选实施方式,本发明不限于以上实施例。可以理解,本领域技术人员在不脱离本发明的精神和构思的前提下直接导出或联想到的其他改进和变化,均应认为包含在本发明的保护范围之内。