1.本发明涉及水下无人航行器技术领域,尤其是一种水下无人航行器回收装置及操作方法。
背景技术:
2.海洋是人类社会可持续发展的宝贵财富和可拓展空间,海洋中蕴藏着丰富的生物资源和矿产资源,世界各国都在加快进入海洋、探索海洋、开发海洋的步伐。在无人与智能化的热潮下,水下无人航行器(autonomous underwater vehicle,auv)受到了广泛关注,在海洋资源可持续利用方面发挥着越来越重要的作用。auv自带能源作业,作业时间有限,需要水下回收充电、数据传输以及任务下载等。
3.在水下回收方面,当前比较典型的水下回收方式包括:
4.1)捕捉式对接回收:auv利用头部捕捉装置捕捉对接装置上的绳索、杆类等导向目标,然后沿导向装置运动,完成对接回收。
5.2)包容式对接回收:对接装置采用导向罩或者笼箱等结构形式对auv进行导向,使auv进入对接管或者对接笼箱内完成对接回收。
6.3)平台式对接回收:auv采用飞机降落的方式降落于对接平台上,锁定对接,完成回收。
7.上述对接回收方式虽然可以完成对auv的回收,但上述对接回收方式的工作范围有限,auv与对接回收装置之间的对接角度需要保持在一定范围内才能够实现对接回收。目前,auv多采用推进器与舵翼组合的形式实现auv的操纵,在弱机动条件下的航向调整能力有限,受各向异性海流的影响,当auv抵近对接回收装置后,容易发生auv与对接回收装置之间的对接角度超出了对接回收装置工作范围的情况,导致对接回收失败,降低了对接回收成功率。
技术实现要素:
8.本技术人针对上述现有生产技术中的缺点,提供一种水下无人航行器回收装置及操作方法,从而可实现auv任意艏向的回收,不受对接角度的限制,提高auv水下回收的成功率。
9.本发明所采用的技术方案如下:
10.一种水下无人航行器回收装置,包括基座,
11.位于基座上方为待回收的auv,所述基座和auv上同时安装有对接模块和位置调整模块;
12.所述基座的上表面安装有电器模块;
13.所述auv的腹部位置安装有锁紧模块;
14.对接模块包括安装在基座上的对接杆和auv上的捕捉器;
15.位置调整模块的安装结构为:所述基座的上表面安装有电机,所述电机的输出端
安装输出轴,输出轴的顶面通过端板安装有对接杆,输出轴上还安装有转动臂,转动臂的头部安装有水平伸缩杆,所述水平伸缩杆的头部安装垂向油缸,垂向油缸的顶部设置有垂向伸缩杆,垂向伸缩杆的顶端设有锁紧头,垂向油缸的外壁面对称设置有搜索声纳支架,所述搜索声纳支架上安装有搜索声纳;还包括安装在auv内的一对搜索信标;
16.锁紧模块的安装结构为:包括内置导向罩的顶面安装有锁紧限位开关,内置导向罩的两端分别安装有锁紧油缸,锁紧油缸的输出端通过锁紧推杆安装锁紧块;
17.电器模块的安装结构为:包括安装在基座上的电池箱,所述电池箱的顶部设有充电接触盘,与auv底部的充电接触头对应;电池箱上还安装有控制舱和液压动力源。
18.其进一步技术方案在于:
19.捕捉器设置在auv艏部,在捕捉器的上方和下方对称设置两个对接声纳。
20.捕捉器的结构为:包括骨架、限位机构和捕捉限位开关,骨架设有v形开口,在v形开口的底部设有u形槽,u形槽底部设有捕捉限位开关,v形开口与u形槽的连接处左右对称设置限位机构;
21.限位机构包括壳体、限位杆和弹簧,限位杆顶部为半球形,沿壳体轴向运动,并通过弹簧的保持在限位位置。
22.对接杆的结构为:包括与端板固定的圆柱杆,圆柱杆与电机的输出轴同轴线,圆柱杆上下各设置一个对接信标,两个对接信标内侧设有限位环。
23.所述内置导向罩采用喇叭形开口,中间段为圆柱形,顶部为半球形。
24.所述锁紧油缸与锁紧推杆设有两套,关于内置导向罩的中横剖面对称布置。
25.所述锁紧头的顶部设置有锁紧头限位开关,锁紧头限位开关与内置导向罩的锁紧限位开关配合。
26.搜索信标关于内置导向罩的中横剖面对称布置,两个搜索信标之间的距离与两个搜索声纳之间的距离一致,搜索声纳与搜索信标一一对应。
27.一种水下无人航行器回收装置的操作方法,包括如下操作步骤:
28.第一步:当auv收到回收指令后,通过对接声纳获取对接杆的位置信息,确定auv与对接杆之间的相对位置,auv利用推进和操纵装置向对接杆驶近,在靠近过程中,通过对接声纳实时更新auv与对接杆之间的相对位置信息,引导auv逐步靠近对接杆;
29.第二步:auv无需调整艏向,在对接声纳的引导下,利用自身的前进冲量通过捕捉器捕获对接杆的圆柱杆,并使圆柱杆进入捕捉器的u形槽,与u形槽捕捉限位开关接触,触发auv向控制舱内的控制系统发射信号,完成初步对接;
30.第三步:控制系统接收到auv发射的信号后,通过搜索声纳获取搜索信标的位置信息;
31.第四步:根据搜索信标的位置信息确定auv与垂向伸缩杆之间在水平面内的相对位置,控制系统控制转动臂的转动和水平伸缩杆的伸缩调整垂向伸缩杆在水平面内的位置,使垂向伸缩杆位于auv内置导向罩的正下方;
32.第五步:通过控制系统控制垂向伸缩杆向auv内置导向罩9内运动;
33.第六步:当锁紧头顶部的锁紧头限位开关与auv内置导向罩顶部的锁紧限位开关接触时,auv内置导向罩顶部的锁紧限位开关控制锁紧油缸驱动锁紧推杆带动锁紧块将垂向伸缩杆抱紧,同时,锁紧头顶部的锁紧头限位开关控制垂向伸缩杆停止运动,转动臂带动
auv在水平面内转动,转至转动臂的初始位置;
34.第七步:通过控制系统控制垂向伸缩杆带动auv向下运动;
35.第八步:当auv的充电接触头与充电接触盘接触形成充电回路开始向auv充电后,垂向伸缩杆停止运动;
36.第九步:完成auv的对接回收,auv持续充电并进行信息交互。
37.本发明的有益效果如下:
38.本发明结构紧凑、合理,操作方便,通过基座、对接模块、位置调整模块、锁紧模块和电气模块的互相配合工作可以方便的完成auv任意艏向的回收工作,并且不受对接角度的限制,大大提高了auv水下回收的成功率。
附图说明
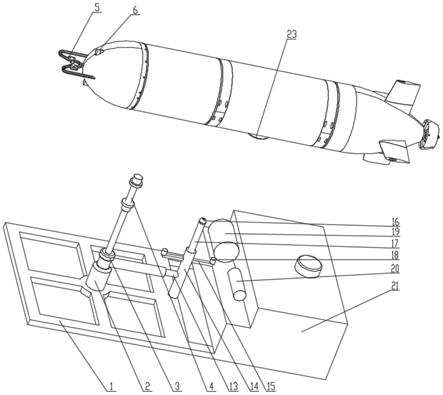
39.图1为本发明的结构示意图。
40.图2为本发明的主视图。
41.图3为本发明auv艏部捕捉器。
42.图4为本发明限位机构的结构示意图。
43.图5为本发明锁紧机构的结构示意图。
44.其中:1、基座;2、电机;3、端板;4、对接杆;401、圆柱杆;5、捕捉器;6、对接声纳;7、搜索信标;8、锁紧油缸;9、内置导向罩;10、锁紧推杆;11、锁紧限位开关;12、转动臂;13、水平伸缩杆;14、垂向油缸;15、搜索声纳支架;16、锁紧头;17、垂向伸缩杆;18、搜索声纳;19、控制舱;20、液压动力源;21、电池箱;22、充电接触盘;23、充电接触头;24、锁紧块;
45.201、输出轴;
46.402、对接信标;403、限位环;
47.501、骨架;502、限位机构;503、捕捉限位开关;
48.50201、限位杆;50202、壳体;50203、弹簧;
49.1601、锁紧头限位开关。
具体实施方式
50.下面结合附图,说明本发明的具体实施方式。
51.如图1
‑
图5所示,本实施例的水下无人航行器回收装置,包括基座1,
52.位于基座1上方为待回收的auv,基座1和auv上同时安装有对接模块和位置调整模块;
53.基座1的上表面安装有电器模块;
54.auv的腹部位置安装有锁紧模块;
55.对接模块包括安装在基座1上的对接杆4和auv上的捕捉器5;
56.位置调整模块的安装结构为:基座1的上表面安装有电机2,电机2的输出端安装输出轴201,输出轴201的顶面通过端板3安装有对接杆4,输出轴201上还安装有转动臂12,转动臂12的头部安装有水平伸缩杆13,水平伸缩杆13的头部安装垂向油缸14,垂向油缸14的顶部设置有垂向伸缩杆17,垂向伸缩杆17的顶端设有锁紧头16,垂向油缸14的外壁面对称设置有搜索声纳支架15,搜索声纳支架15上安装有搜索声纳18;还包括安装在auv内的一对
搜索信标7;
57.锁紧模块的安装结构为:包括内置导向罩9的顶面安装有锁紧限位开关11,内置导向罩9的两端分别安装有锁紧油缸8,锁紧油缸8的输出端通过锁紧推杆10安装锁紧块24;
58.电器模块的安装结构为:包括安装在基座1上的电池箱21,电池箱21的顶部设有充电接触盘22,与auv底部的充电接触头23对应;电池箱21上还安装有控制舱19和液压动力源20。
59.捕捉器5设置在auv艏部,在捕捉器5的上方和下方对称设置两个对接声纳6。
60.捕捉器5的结构为:包括骨架501、限位机构502和捕捉限位开关503,骨架501设有v形开口,在v形开口的底部设有u形槽,u形槽底部设有捕捉限位开关503,v形开口与u形槽的连接处左右对称设置限位机构502;
61.限位机构502包括壳体50202、限位杆50201和弹簧50203,限位杆50201顶部为半球形,沿壳体50202轴向运动,并通过弹簧50203的保持在限位位置。
62.对接杆4的结构为:包括与端板3固定的圆柱杆401,圆柱杆401与电机2的输出轴201同轴线,圆柱杆401上下各设置一个对接信标402,两个对接信标402内侧设有限位环403。
63.内置导向罩9采用喇叭形开口,中间段为圆柱形,顶部为半球形。
64.锁紧油缸8与锁紧推杆10设有两套,关于内置导向罩9的中横剖面对称布置。
65.锁紧头16的顶部设置有锁紧头限位开关1601,锁紧头限位开关1601与内置导向罩9的锁紧限位开关11配合。
66.搜索信标7关于内置导向罩9的中横剖面对称布置,两个搜索信标7之间的距离与两个搜索声纳18之间的距离一致,搜索声纳18与搜索信标7一一对应。
67.本实施例水下无人航行器回收装置的操作方法,包括如下操作步骤:
68.第一步:当auv收到回收指令后,通过对接声纳6获取对接杆4的位置信息,确定auv与对接杆4之间的相对位置,auv利用推进和操纵装置向对接杆4驶近,在靠近过程中,通过对接声纳6实时更新auv与对接杆4之间的相对位置信息,引导auv逐步靠近对接杆4;
69.第二步:auv无需调整艏向,在对接声纳6的引导下,利用自身的前进冲量通过捕捉器5捕获对接杆4的圆柱杆401,并使圆柱杆401进入捕捉器5的u形槽,与u形槽捕捉限位开关503接触,触发auv向控制舱19内的控制系统发射信号,完成初步对接;
70.第三步:控制系统接收到auv发射的信号后,通过搜索声纳18获取搜索信标7的位置信息;
71.第四步:根据搜索信标7的位置信息确定auv与垂向伸缩杆17之间在水平面内的相对位置,控制系统控制转动臂12的转动和水平伸缩杆13的伸缩调整垂向伸缩杆17在水平面内的位置,使垂向伸缩杆17位于auv内置导向罩9的正下方;
72.第五步:通过控制系统控制垂向伸缩杆17向auv内置导向罩9内运动;
73.第六步:当锁紧头16顶部的锁紧头限位开关1601与auv内置导向罩9顶部的锁紧限位开关11接触时,auv内置导向罩9顶部的锁紧限位开关11控制锁紧油缸8驱动锁紧推杆10带动锁紧块24将垂向伸缩杆17抱紧,同时,锁紧头16顶部的锁紧头限位开关1601控制垂向伸缩杆17停止运动,转动臂12带动auv在水平面内转动,转至转动臂12的初始位置;
74.第七步:通过控制系统控制垂向伸缩杆17带动auv向下运动;
75.第八步:当auv的充电接触头23与充电接触盘22接触形成充电回路开始向auv充电后,垂向伸缩杆17停止运动;
76.第九步:完成auv的对接回收,auv持续充电并进行信息交互。
77.本发明的具体结构和功能如下:
78.主要包括基座1,对接模块、位置调整模块、锁紧模块和电气模块。
79.对接模块包括对接杆4和捕捉器5两部分,
80.其中,捕捉器5设置在auv艏部。
81.对接杆4包括圆柱杆401、对接信标402和限位环403,
82.其中,圆柱杆401固定在位置调整模块中电机2的顶部端板3上,圆柱杆401与电机2的输出轴201同轴线,圆柱杆401上下各设置一个对接信标402,两个对接信标402内侧设有限位环403。
83.捕捉器5设置在auv艏部,同时,在捕捉器5的上方和下方对称设置两个对接声纳6,两个对接声纳6之间的距离与两个对接信标402之间的距离一致,对接声纳6与对接信标402一一对应,auv通过对接声纳6与对接信标402即可确定对接杆4的位置,并引导auv靠近。
84.捕捉器5包括骨架501、限位机构502和捕捉限位开关503,骨架501设有v形开口,在开口的底部设有u形槽,u形槽底部设有捕捉限位开关503,v形开口与u形槽的连接处左右对称设置限位机构502。
85.限位机构502包括壳体50202、限位杆50201和弹簧50203,限位杆50201顶部为半球形,可沿壳体50202轴向运动,并通过弹簧50203的作用保持在限位位置。
86.在对接过程中,对接杆4将auv的前进冲力传递至限位杆50201的半球形顶部,在限位杆50201的轴向产生一个分力,限位杆50201在该分力的作用下沿轴向向壳体50202内部收缩,同时压缩弹簧50203,直至限位杆50201进入骨架501的u形槽,限位杆50201在弹簧50203的作用下恢复至初始位置。
87.位置调整模块包括电机2、转动臂12、水平伸缩杆13、垂向油缸14、垂向伸缩杆17、搜索声纳18、搜索声纳支架15、搜索信标7和锁紧头16。
88.其中,搜索信标7设置在auv腹部。电机2固定在基座1上,通过缆线分别与电池箱21和控制舱19连接,顶端设有输出轴201;转动臂12的一端与电机2的输出轴201连接,在电机2的作用下转动臂12可360度旋转;水平伸缩杆13通过控制系统实现其在转动臂12内的伸缩;垂向油缸14与水平伸缩杆13的一端连接,水平伸缩杆13可带动垂向油缸14沿水平伸缩杆13轴向移动;垂向伸缩杆17的顶端设有锁紧头16,在锁紧头16的顶部设有锁紧头限位开关1601,通过控制系统实现垂向伸缩杆17沿垂向油缸14轴向的伸缩;搜索声纳18沿水平伸缩杆13轴线关于垂向油缸14中横剖面对称布置,通过搜索声纳支架15与垂向油缸14连接为一个整体,搜索信标7关于锁紧模块中的内置导向罩9的中横剖面对称布置,两个搜索信标7之间的距离与两个搜索声纳18之间的距离一致,搜索声纳18与搜索信标7一一对应。
89.锁紧模块设置在auv的腹部,包括内置导向罩9、锁紧油缸8、锁紧推杆10、锁紧块24和锁紧限位开关11。
90.内置导向罩9采用喇叭形开口,中间段为圆柱形,顶部为半球形;锁紧油缸8与锁紧推杆10设有两套,关于内置导向罩9中横剖面对称布置,锁紧块24与锁紧推杆10的一端连接,锁紧油缸8通过控制系统的控制使锁紧推杆10带动锁紧块24伸缩,将垂向伸缩杆17抱
紧,限制垂向伸缩杆17与auv之间的水平相对移动,通过锁紧头16限制垂向伸缩杆17与auv之间的垂向相对移动;锁紧限位开关11设置在内置导向罩9的顶部,与锁紧头16顶部的锁紧头限位开关1601配合使用。
91.电气模块包括电池箱21、充电接触盘22、充电接触头23、控制舱19和液压动力源20,其中,充电接触头23设置在auv的腹部。电池箱21设置在基座1上,用于装置的供电和auv的充电;电池箱21的顶部设有充电接触盘22,可与充电接触头23接触,实现对auv的充电;控制舱19内设有控制系统,实现对全系统的控制;液压动力源20与垂向油缸14和转动臂12通过油管连接,与控制舱19通过电缆连接,通过控制系统的控制为液压执行机构提供液压动力。
92.实际操作过程中:
93.当auv收到回收指令后,通过对接声纳6获取两个对接信标402的位置信息,根据对接信标402的位置信息确定auv与对接杆4之间的相对位置,auv利用推进和操纵装置向对接杆4驶近,在靠近过程中,通过对接声纳6实时更新auv与对接杆4之间的相对位置信息,引导auv逐步靠近对接杆4;
94.auv无需调整艏向,在对接声纳6的引导下,利用自身的前进冲量通过捕捉器5捕获圆柱杆401,并使圆柱杆401进入捕捉器5的u形槽,与u形槽捕捉限位开关503接触,触发auv向控制舱19内的控制系统发射信号,完成初步对接;
95.控制系统接收到auv发射的信号后,通过搜索声纳18获取搜索信标7的位置信息,根据搜索信标7的位置信息确定auv与垂向伸缩杆17之间在水平面内的相对位置,控制系统控制转动臂12的转动和水平伸缩杆13的伸缩调整垂向伸缩杆17在水平面内的位置,使垂向伸缩杆17位于auv内置导向罩9的正下方;
96.通过控制系统控制垂向伸缩杆17向auv内置导向罩9内运动,当锁紧头16顶部的锁紧头限位开关1601与auv内置导向罩9顶部的锁紧限位开关11接触时,auv内置导向罩9顶部的锁紧限位开关11控制锁紧油缸8驱动锁紧推杆10带动锁紧块24将垂向伸缩杆17抱紧,同时,锁紧头16顶部的锁紧头限位开关1601控制垂向伸缩杆17停止运动,转动臂12带动auv在水平面内转动,转至转动臂12的初始位置;
97.通过控制系统控制垂向伸缩杆17带动auv向下运动,当auv的充电接触头23与充电接触盘22接触形成充电回路开始向auv充电后,垂向伸缩杆17停止运动,完成auv的对接回收,auv持续充电并进行信息交互。
98.本发明操作简便,工作可靠性好,大大提高了auv水下回收的成功率。
99.以上描述是对本发明的解释,不是对发明的限定,本发明所限定的范围参见权利要求,在本发明的保护范围之内,可以作任何形式的修改。