1.本发明涉及无人机巡检技术领域,具体涉及基于人工智能图像识别的无人机自动驾驶系统。
背景技术:
2.目前,输电线路维护时,还是主要依靠人工维护,但人工维护存在的问题是:电塔上需要维护的小型配件多,加上攀登电塔较为费时,人工负重有限,一次无法携带多少工具和更换配件,往往是人工攀登确认故障所需工具和配件后,由地面同伴攀登送上或吊绳拉上。一则同伴攀登往返麻烦,携带量同样有限,二则吊绳在高空摇晃存在危险,准备工作多。因此需要一种稳定的手段,为高空维护人员送上工具和配件。
3.加之,如果能在地面设置一个半自动辅助更换无人机携带物的换装平台,利用人工智能图像识别技术,引导无人机起降,再结合换装平台,对无人机挂载物进行选择更换,并对无人机进行充电等维护工作,再持续输送配件。
4.维护人员便可以只携带遥控设备,在电塔上操作地面的换装平台,实现遥控选取所需工具、配件,由无人机送至作业处,极大简便了操作流程。
5.同时,如果需要远距离平台与平台之间进行交互,相互补充地域所需的物资,就需要无人机在两平台之间进行长距离飞行。
6.长距离飞行后,无人机在起落时需要进行准确的定位,防止无人机偏离原定的轨道,但是现已有的无人机导航技术,是通过远距离导航定位,导致定位不准确,使得无人机偏离了原本的航道。并且在无人机降落后或升降前如果遇到一些极端天气,无人机无法返还安全地带,如待在降落点或起飞点则会损害无人机。
技术实现要素:
7.本发明为了解决上述技术的不足,提供了基于人工智能图像识别的无人机自动驾驶系统。本发明的技术方案:基于人工智能图像识别的无人机自动驾驶系统,其特征在于:包括无人机及平台,该无人机设有导航摄像头,所述平台包括通信模块、电源模块、无人机、起降台、监控摄像头、定坐标机构、第一机械手、置换台、第二机械手及货柜,所述无人机上挂载有储物箱,该储物箱为立方体,侧面设有进出口,所述无人机携带储物箱降落于起降台,该起降台为固定位置,中心设有与立方体轮廓对应的预制坐标线,该预制坐标线设有特定图形色彩,所述定坐标机构包括对交叉及驱动气缸,该对交叉呈l型,并与预制坐标线的边角对齐,所述驱动气缸相对预制坐标线边角的距离、往复行程为固定值,该驱动气缸启动对交叉移动至与预制坐标线边角对齐,所述起降台两侧对称设置有两个定坐标机构;所述第一机械手、置换台、第二机械手、及货柜的格子均有固定的预制坐标,该第一机械手于储物箱至置换台之间夹送物料,所述第二机械手于置换台至货柜各格子之间夹送物料;所述起落装置包括杆塔本体,所述杆塔本体顶部固定连接有支撑箱,所述支撑箱底部固定连接有固定箱,该支撑箱设有特定图像色彩,所述支撑箱内
部设置有防护机构,所述固定箱内部设置有固定机构;所述防护机构包括支撑箱内底壁固定连接的无线充电器本体,所述支撑箱内底壁固定连接有电机,所述电机顶部固定连接有正齿轮,所述正齿轮啮合连接有齿轮板,所述齿轮板顶部固定连接有连接杆,所述连接杆顶部固定连接有挡板。
8.采用上述技术方案,采用半自动化换装物料、工具的难点在于,无人机降落后,位置是处于不确定的坐标,导致机械手难以直接以确定的坐标、确定的程序运行。如果依靠后期视觉测量等技术,过于复杂,成本也高。
9.因此,本发明通过设置定坐标机构,通过人工智能图像识别技术,识别预制坐标线的图像色彩信息,引导无人机降落于起降台上进行换装,或是根据剩余电量,去识别支撑箱的图像色彩,降落于降落装置上进行充电。
10.降落于起降台上时,此时降落位置是起降台内的随机一处。通过设置储物箱横截面为方形,和呈l型的对交叉,在驱动气缸驱动对交叉靠近储物箱时,因为对交叉预设的停止位置,就是预设方形坐标线的边角处,加上对称设置的两个定坐标机构,随着两个对交叉的推动,不管储物箱降落时的坐标是什么,最终都会被推至与预制坐标线重合的位置,这样便得到了储物箱的固定坐标。
11.也就便于第一机械手直接按着预设程序,在固定坐标之间夹取物料。设置的监控摄像头便于远程操作时,贯穿现场,如无人机落在起降台的情况,需要货柜哪一格物品等。设置的通信模块用于传输数据、设置的电源模块为各设备供电。
12.本发明的进一步设置:所述对交叉的开口末端设有弧形引导边。
13.采用上述技术方案,设置的弧形引导边,用于引导储物箱落入叉内。
14.本发明的进一步设置:所述储物箱内沿竖直方向设有若干道卡槽,及若干个与卡槽卡合的抽屉,所述第一机械手夹送抽屉至置换台。
15.采用上述技术方案,设置的抽屉便于装载物料,设置不同高度的卡槽,便于根据物料高度,选择卡槽。
16.本发明的进一步设置:所述无人机底部设有第一连接轴、连接轴管,该第一连接轴上设有环形槽,所述储物箱顶部设有第二连接轴,所述连接轴管一端套设于第一连接轴上,并设有卡入环形槽的环形凸缘,做轴向固定周向旋转;该连接轴管另一端套设与第二连接轴上,并与第二连接轴均设有沿径向的螺纹销孔,所述连接轴套与第二连接轴之间通过螺栓插入螺纹销孔固定。
17.采用上述技术方案,使储物箱能与无人机自由拆卸。
18.本发明的进一步设置:所述平台还包括第三机械手及第四机械手,该第三机械手夹住起降台上的无人机,所述第四机械手拆卸螺纹销孔中的螺栓。
19.采用上述技术方案,通过第三、第四机械手,实现拆卸储物箱,便于收拢无人机,和无人机更换储物箱。
20.本发明的进一步设置:所述包括箱体及设置于箱体内的固定台座,所述固定台座的一侧设有固定夹爪,另一侧设有朝向固定夹爪的滑动槽,该滑动槽内设置有活动夹爪做滑动配合,所述滑动夹爪远离固定夹爪的端面上设有复位拉簧,该复位拉簧与滑动槽末端端面连接,所述滑动夹爪朝向固定夹爪的端面设有预紧带,该预紧带表面沿长度方向设有若干道卡槽;所述固定台座相对固定夹爪的一侧,设置轴孔、卷带轴、电磁锁及推板,所述轴
孔垂直于滑动槽并贯穿滑动槽,所述卷带轴设置轴孔内做轴向固定、周向旋转配合,所述预紧带一端缠绕于卷带轴上,该卷带轴周转驱动活动夹爪靠近固定夹爪;所述推板上设有朝向卷带轴卡槽的凸块,该推板与电磁锁的锁头固定连接,所述电磁锁与无人机控制芯片信号连接,控制推板凸块出入预紧带卡槽内。
21.本发明的进一步设置:所述箱体侧面设有开口,该开口处铰链设置有旋转启闭的门,所述箱体上设有与无人机控制芯片信号连接的电机,该电机的输出轴与门的门轴通过同步带连接,所述电机控制门旋转启闭。
22.本发明的进一步设置:所述固定台座两侧沿水平方向设有插条,该插条对应箱体开口的一端设有呈l型的挡条,所述箱体内对应插条位置设有插槽。
23.采用上述技术方案,使固定台座可以自由拆卸。
24.本发明的进一步设置:所述箱体内沿竖直方向设有若干道插槽。
25.采用上述技术方案,使箱内空间可以合理利用,根据物料高度不通,调整竖向位置。
26.本发明的进一步设置:所述卷带轴的端面设有十字或一字或内六角槽。
27.本发明的进一步设置:起落装置,包括杆塔本体,所述杆塔本体顶部固定连接有支撑箱,所述支撑箱底部固定连接有固定箱,所述支撑箱内部设置有防护机构,所述固定箱内部设置有固定机构。
28.杆塔本体主要是支撑顶部的结构,支撑箱主要是通过内部结构对无人机进行充电,同时在下雨时让无人机停留,防止无人机被雨水损坏。
29.所述防护机构包括支撑箱内底壁固定连接的无线充电器本体,所述支撑箱内底壁固定连接有电机,所述电机顶部固定连接有正齿轮,所述正齿轮啮合连接有齿轮板,所述齿轮板顶部固定连接有连接杆,所述连接杆顶部固定连接有挡板。
30.无线充电器本体主要是对无人机进行充电,无线充电器本体是利用电磁感应原理进行充电的设备,无人机在起落时可以在支撑箱内部停留,通过支撑箱内部设置的无线充电器本体进行充电,同时在下雨时无人机可以进入到支撑箱内,电机通过正齿轮带动齿轮板的移动,齿轮板通过连接杆带动挡板移动,当连接杆向空心杆的方向靠近时,挡板打开支撑箱的顶部,使得无人机可以进入到支撑箱,无人机进入支撑箱内部后,电机反向转动,挡板对支撑箱顶部进行遮挡,使得无人机不会被雨水损坏。
31.优选的,所述挡板插接有夹板,所述夹板外侧与支撑箱内表面固定连接。
32.夹板主要是固定挡板,使得挡板可以在支撑箱内部来回滑动。
33.优选的,所述电机外表面活动连接有固定杆,所述连接杆一侧固定连接有第一伸缩杆。
34.优选的,所述第一伸缩杆一侧固定连接有弹簧,所述第一伸缩杆外表面活动连接有空心杆。
35.优选的,所述固定机构包括固定箱内壁活动连接的转动盘,所述转动盘背面固定连接有转动杆,所述转动杆外表面固定连接有固定块。
36.优选的,所述固定块螺纹连接有连接套,所述连接套内表面固定连接有第二伸缩杆,所述第二伸缩杆插接有固定套。
37.连接套带动第二伸缩杆在固定套内部滑动,固定套固定在固定箱的内表面,支撑
第二伸缩杆的移动。
38.优选的,所述第二伸缩杆内侧固定连接有固定板,所述固定板内侧固定连接有防护垫,所述防护垫内侧搭接有定位器本体。
39.附图说明
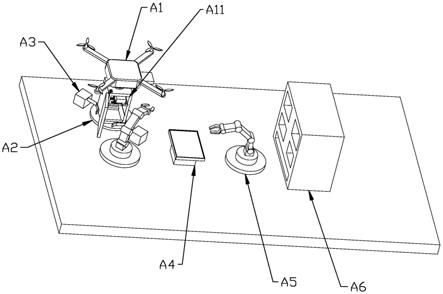
40.图1为本发明实施例的结构图a1;图2为本发明实施例的爆炸图a1;图3为本发明实施例的结构图a2;图4为本发明实施例的爆炸图a2。
41.图5为本发明实施例的结构图b1;图6为本发明实施例的爆炸图b1;图7为本发明实施例的结构图b2;图8为本发明实施例的爆炸图b2;图9为本发明实施例的结构图b3。
42.图10为本发明辅助定位装置整体结构示意图;图11为本发明防护机构正视图;图12为本发明防护机构右视图;图13为本发明齿轮板整体结构示意图;图14为本发明空心杆正视图;图15为本发明固定箱整体结构示意图;图16为本发明固定机构俯视图;图17为图16中a处放大图。
43.其中,a1-无人机、a11-储物箱、a12-第一连接轴、a121-环形槽、a13-连接轴管、a131-环形凸缘、a14-第二连接轴、a15-螺纹销孔、a16-螺栓、a2-起降台、a3-定坐标机构、a31-对交叉、a32-驱动气缸、a32-弧形引导边、a4-置换台、a5-第二机械手、a6-货柜。
44.b2-箱体、b21-插槽、b3-固定台座、b31-滑动槽、b32-轴孔、b33-卷带轴、b34-电磁锁、b35-推板、b36-插条、b37-挡条、b351-凸块、b4-固定夹爪、b5-活动夹爪、b6-复位拉簧、b7-预紧带、b71-卡槽、b8-门、b9-电机、b10-同步带。
45.c1、杆塔本体;c2、支撑箱;c211、无线充电器本体;c212、电机;c213、正齿轮;c214、齿轮板;c215、连接杆;c216、挡板;c217、夹板;c218、固定杆;c219、第一伸缩杆;c220、弹簧;c221、空心杆;c3、固定箱;c311、转动盘;c312、转动杆; c313、固定块;c314、连接套;c315、第二伸缩杆;c316、固定套;c317、固定板; c318、防护垫;c319、定位器本体。
46.具体实施方式
47.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他
实施例,都属于本发明保护的范围。
48.如图a1-17所示,一种无人机a1自动驾驶巡线换装平台,所述平台包括通信模块、电源模块、无人机a1、起降台a2、监控摄像头、定坐标机构、定坐标机构a3、置换台a4、第二机械手a5及货柜a6,所述无人机a1上挂载有储物箱a11,该储物箱a11为立方体,侧面设有进出口,所述无人机a1携带储物箱a11降落于起降台a2,该起降台a2为固定位置,中心设有与立方体轮廓对应的预制坐标线,所述定坐标机构包括对交叉a31及驱动气缸 a32,该对交叉a31呈l型,并与预制坐标线的边角对齐,所述驱动气缸a32相对预制坐标线边角的距离、往复行程为固定值,该驱动气缸a32启动对交叉a31移动至与预制坐标线边角对齐,所述起降台a2两侧对称设置有两个定坐标机构;所述定坐标机构a3、置换台a4、第二机械手a5、及货柜a6的格子均有固定的预制坐标,该定坐标机构a3于储物箱a11至置换台a4之间夹送物料,所述第二机械手a5于置换台a4至货柜a6各格子之间夹送物料。
49.采用半自动化换装物料、工具的难点在于,无人机a1降落后,位置是处于不确定的坐标,导致机械手难以直接以确定的坐标、确定的程序运行。如果依靠后期视觉测量等技术,过于复杂,成本也高。
50.因此,本发明通过设置定坐标机构,先遥控无人机a1降落于起降台a2上,此时降落位置是起降台a2内的随机一处。通过设置储物箱a11横截面为方形,和呈l型的对交叉a31,在驱动气缸a32驱动对交叉a31靠近储物箱a11时,因为对交叉a31预设的停止位置,就是预设方形坐标线的边角处,加上对称设置的两个定坐标机构,随着两个对交叉 a31的推动,不管储物箱a11降落时的坐标是什么,最终都会被推至与预制坐标线重合的位置,这样便得到了储物箱a11的固定坐标。
51.也就便于定坐标机构a3直接按着预设程序,在固定坐标之间夹取物料。设置的监控摄像头便于远程操作时,贯穿现场,如无人机a1落在起降台a2的情况,需要货柜a6 哪一格物品等。设置的通信模块用于传输数据、设置的电源模块为各设备供电。
52.所述对交叉a31的开口末端设有弧形引导边a32。
53.设置的弧形引导边a32,用于引导储物箱a11落入叉内。
54.所述储物箱a11内沿竖直方向设有若干道卡槽,及若干个与卡槽卡合的抽屉,所述定坐标机构a3夹送抽屉至置换台a4。
55.设置的抽屉便于装载物料,设置不同高度的卡槽,便于根据物料高度,选择卡槽。
56.所述无人机a1底部设有第一连接轴a12、连接轴管a13,该第一连接轴a12上设有环形槽a121,所述储物箱a11顶部设有第二连接轴a14,所述连接轴管a13一端套设于第一连接轴a12上,并设有卡入环形槽a121的环形凸缘a131,做轴向固定周向旋转;该连接轴管a13另一端套设与第二连接轴a14上,并与第二连接轴a14均设有沿径向的螺纹销孔a15,所述连接轴套与第二连接轴a14之间通过螺栓a16插入螺纹销孔a15固定。
57.使储物箱a11能与无人机a1自由拆卸。
58.所述平台还包括第三机械手及第四机械手,该第三机械手夹住起降台a2上的无人机 a1,所述第四机械手拆卸螺纹销孔a15中的螺栓a16。
59.通过第三、第四机械手,实现拆卸储物箱a11。
60.所述储物箱包括箱体b2及设置于箱体b2内的固定台座b3,所述固定台座b3的一侧设有固定夹爪b4,另一侧设有朝向固定夹爪b4的滑动槽b31,该滑动槽b31内设置有活动夹
爪b5做滑动配合,所述滑动夹爪远离固定夹爪b4的端面上设有复位拉簧b6,该复位拉簧b6与滑动槽b31末端端面连接,所述滑动夹爪朝向固定夹爪b4的端面设有预紧带 b7,该预紧带b7表面沿长度方向设有若干道卡槽b71;所述固定台座b3相对固定夹爪b4 的一侧,设置轴孔b32、卷带轴b33、电磁锁b34及推板b35,所述轴孔b32垂直于滑动槽 b31并贯穿滑动槽b31,所述卷带轴b33设置轴孔b32内做轴向固定、周向旋转配合,所述预紧带b7一端缠绕于卷带轴b33上,该卷带轴b33周转驱动活动夹爪b5靠近固定夹爪 b4;所述推板上设有朝向卷带轴b33卡槽b71的凸块b351,该推板与电磁锁b34的锁头固定连接,所述电磁锁b34与无人机1控制芯片信号连接,控制推板凸块b351出入预紧带 b7卡槽b71内。
61.为了避免挂载的工具、物料,在随无人机1飞行时在箱体b2内发生震荡碰撞位移,应进行固定、绑定工作,但传统的固定、绑定工作,在无人机1到达维护人员位置悬停,供维护人员拿取时,又需要维护人员进行解绑,在高空进行该操作较为繁琐。
62.因此,本发明设置的装夹机构,在无人机1处于地面装货时,地面人员将物料放于活动夹爪b5与固定夹爪b4之间,然后通过卷带轴b33周转,缠绕预紧带b7与其固定的端部,拉动另一端,使活动夹爪b5靠近固定夹爪b4夹紧物料,然后控制电磁锁b34推动推板靠近卷带轴b33上的预紧带b7,使推板上的凸块b351卡入预紧带b7的卡槽b71内,保持预紧带b7缠绕位置,即是防止预紧带b7位移,使两夹爪保持夹紧物料的状态。
63.然后随着无人机1携带物料飞至维护人员处,遥控电磁锁b34打开,推板远离预紧带b7,预紧带b7侧的固定松开后,在复位弹簧的作用下,两夹爪自动分开,无需维护人员任何解绑操作,便可以直接取用解绑的工具、物料。
64.所述箱体b2侧面设有开口,该开口处铰链设置有旋转启闭的门b8,所述箱体b2上设有与无人机1控制芯片信号连接的电机b9,该电机b9的输出轴与门b8的门b8轴通过同步带b10连接,所述电机b9控制门b8旋转启闭。
65.通过设置可遥控启闭的门b8,进一步避免飞行时箱体b2内物品脱出,并能在悬停位置遥控打开。
66.所述固定台座b3两侧沿水平方向设有插条b36,该插条b36对应箱体b2开口的一端设有呈l型的挡条b37,所述箱体b2内对应插条b36位置设有插槽b21。
67.使固定台座b3可以自由拆卸。
68.所述箱体b2内沿竖直方向设有若干道插槽b21。
69.使箱内空间可以合理利用,根据物料高度不通,调整竖向位置。
70.所述卷带轴b33的端面设有十字或一字或内六角槽。
71.便于用螺丝刀或六角扳手驱动卷带轴b33周转。
72.无人机起落装置,包括杆塔本体c1,杆塔本体c1顶部固定连接有支撑箱c2,支撑箱c2底部固定连接有固定箱c3,支撑箱c2内部设置有防护机构,固定箱c3内部设置有固定机构。
73.通过上述技术方案,杆塔本体c1主要是支撑顶部的结构,支撑箱c2主要是通过内部结构对无人机进行充电,同时在下雨时让无人机停留,防止无人机被雨水损坏。
74.具体的,防护机构包括支撑箱c2内底壁固定连接的无线充电器本体c211,支撑箱 c2内底壁固定连接有电机c212,电机c212顶部固定连接有正齿轮c213,正齿轮c213啮合连接有齿轮板c214,齿轮板c214顶部固定连接有连接杆c215,连接杆c215顶部固定连接有挡
板c216。
75.通过上述技术方案,无线充电器本体c211主要是对无人机进行充电,无线充电器本体c211是利用电磁感应原理进行充电的设备,其原理和变压器相似,通过在发送和接收端各安置一个线圈,发送端线圈在电力的作用下向外界发出电磁信号,接收端线圈收到电磁信号并且将电磁信号转变为电流,从而达到无线充电的目的,无线充电器本体c211和电机 c212内部线路结构为现已有技术,无人机在起落时可以在支撑箱c2内部停留,通过支撑箱 c2内部设置的无线充电器本体c211进行充电,同时在下雨时无人机可以进入到支撑箱c2 内,电机c212通过正齿轮c213带动齿轮板c214的移动,齿轮板c214通过连接杆c215 带动挡板c216移动,当连接杆c215向空心杆c221的方向靠近时,挡板c216打开支撑箱 c2的顶部,使得无人机可以进入到支撑箱c2,无人机进入支撑箱c2内部后,电机c212 反向转动,挡板c216对支撑箱c2顶部进行遮挡,使得无人机不会被雨水损坏,同时可以保护支撑箱c2内部的结构防止支撑箱c2内部的结构被雨水损坏。
76.具体的,挡板c216插接有夹板c217,夹板c217外侧与支撑箱c2内表面固定连接。
77.通过上述技术方案,夹板c217主要是固定挡板c216,使得挡板c216可以在支撑箱 c2内部来回滑动。
78.具体的,电机c212外表面活动连接有固定杆c218,连接杆c215一侧固定连接有第一伸缩杆c219。
79.通过上述技术方案,固定杆c218通过轴承与电机c212的轴杆进行连接,使得电机 c212在运行时更加地稳定,第一伸缩杆c219主要是支撑挡板c216的移动。
80.具体的,第一伸缩杆c219一侧固定连接有弹簧c220,第一伸缩杆c219外表面活动连接有空心杆c221。
81.通过上述技术方案,弹簧c220主要是弹出第一伸缩杆c219,空心杆c221主要是固定第一伸缩杆c219使得第一伸缩杆c219能够在空心杆c221内滑动。
82.具体的,固定机构包括固定箱c3内壁活动连接的转动盘c311,转动盘c311背面固定连接有转动杆c312,转动杆c312外表面固定连接有固定块c313。
83.通过上述技术方案,安装人员在安装定位器本体c319时,安装人员直接将定位器本体c319插入固定箱c3的内部,安装人员在转动转动盘c311,转动盘c311带动转动杆 c312进行转动,固定块c313主要是防止连接套c314移动过多的位置,造成装置不能正常运行。
84.具体的,固定块c313螺纹连接有连接套c314,连接套c314内表面固定连接有第二伸缩杆c315,第二伸缩杆c315插接有固定套c316。
85.通过上述技术方案,连接套c314带动第二伸缩杆c315在固定套c316内部滑动,固定套c316固定在固定箱c3的内表面,支撑第二伸缩杆c315的移动。
86.具体的,第二伸缩杆c315内侧固定连接有固定板c317,固定板c317内侧固定连接有防护垫c318,防护垫c318内侧搭接有定位器本体c319。
87.通过上述技术方案,当第二伸缩杆c315向定位器本体c319的方向移动时,第二伸缩杆c315通过固定板c317和防护垫c318固定定位器本体c319防止定位器本体c319的移动,定位器本体c319是内置了gps模块和移动通信模块的终端,用于将gps模块获得的定位数据通过移动通信模块传至网络上的一台服务器上,从而对无人机进行准确的定位,防护垫c318主要是由弹性材料组成防止定位器本体c319被夹坏。
88.在使用时,无人机在起落时可以在支撑箱c2内部停留,通过支撑箱c2内部设置的无线充电器本体c211进行充电,同时在下雨时无人机可以进入到支撑箱c2内,电机c212 通过正齿轮c213带动齿轮板c214的移动,齿轮板c214通过连接杆c215带动挡板c216 移动,当连接杆c215向空心杆c221的方向靠近时,挡板c216打开支撑箱c2的顶部,使得无人机可以进入到支撑箱c2,无人机进入支撑箱c2内部后,电机c212反向转动,挡板 c216对支撑箱c2顶部进行遮挡,使得无人机不会被雨水损坏,同时可以保护支撑箱c2内部的结构防止支撑箱c2内部的结构被雨水损坏。
89.安装人员在安装定位器本体c319时,安装人员直接将定位器本体c319插入固定箱 c3的内部,安装人员在转动转动盘c311,转动盘c311带动转动杆c312进行转动,转动杆 c312与连接套c314螺纹连接,当转动杆c312转动时,转动杆c312带动连接套c314进行移动,连接套c314带动第二伸缩杆c315在固定套c316内部滑动,当第二伸缩杆c315向定位器本体c319的方向移动时,第二伸缩杆c315通过固定板c317和防护垫c318固定定位器本体c319防止定位器本体c319的移动,防护垫c318由弹性材料组成防止定位器本体 c319被夹坏。
90.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。