1.本发明涉及水下机器人装备领域,具体涉及一种力反馈型闭环控制水下推进器。
背景技术:
2.水下机器人为了实现高精度位姿控制,通常采用多个推进器矢量布局的方式,用以产生每个自由度上的控制力和力矩。传统上推进器多采用电机+螺旋桨传动机构和开环控制方式,由于螺旋桨的工作特性,容易受到推进器在水下机器人上的结构布局﹑推进器与推进器之间相互干扰、不同方向海流引起的推力损失、波浪引起的推力损失等外界环境影响,导致相同转速下产生的推力存在较大差异。同时,电机性能、制造/装配偏差等因素导致同一批推进器中,相同控制信号下转速也存在偏差进而导致推力一致性较差。因此,现有技术无法实现复杂流场环境下的推力精确、稳定控制,已成为制约水下机器人动力定位控制精度的关键所在。
技术实现要素:
3.本发明的目的是提供一种力反馈型闭环控制水下推进器,以解决流场扰动下相同力控制信号下推力输出波动大、制造/装配偏差导致的同一批推进器推力一致性较差等问题。
4.本发明的目的是以下述方式实现的:一种力反馈型闭环控制水下推进器,包括壳体,所述壳体内设有控制器、无刷直流电机,所述无刷直流电机的传动轴从壳体一端穿出以用于固定位于壳体外侧的螺旋桨,螺旋桨叶片外部安装有导流罩,所述无刷直流电机的转子处安装霍尔位置传感器;所述壳体上固定一推力传感器,所述推力传感器和霍尔位置传感器均与控制器通信连接,控制器接收推力控制信号后,驱动无刷直流电机带动传动轴转动,进而带动螺旋桨转动,产生推力,推力传感器将采集到的推力数据反馈至控制器,形成外环力环;控制器接收推力控制信号后,驱动无刷直流电机带动传动轴转动,霍尔位置传感器将检测的转子实际转速信息反馈至控制器,形成中间环速度环;控制器接收推力控制信号后,驱动无刷直流电机带动传动轴转动,控制器上的电流检测电路将检测的电枢电流反馈至控制器,形成内环电流环。
5.所述无刷直流电机,安装在壳体中部,电机的定子与壳体内壁贴合,电机转子与传动轴过盈配合。
6.所述电机的转子的传动轴两侧位置各布置一组推力轴承。
7.所述推力传感器水密封装,下端设置有中空式结构的固定环,所述固定环套在壳体上。
8.所述壳体采用非磁性、耐腐蚀的材质,包括钛合金或不锈钢。
9.所述壳体外部加工有推力传感器安装法兰,法兰上对称均匀开通孔。
10.所述壳体尾部开设有两个螺孔,用于安装两个水密插座,一个用于推进器供电和控制信号传输,另一个用于接收反馈推力信号。
11.本发明的有益效果:力反馈型闭环控制水下推进器具有推力输出精准、自适应抗干扰、对总体依赖性小、响应灵敏、工作可靠等优点,可应用于水下动平衡作业、水下矢量推进等场合,在各类uuv、rov、船舶、钻井平台等海工装备上适装性好,降低了与控制总体的集成与控制难度,应用前景广阔,具有较高的经济和社会效益。
附图说明
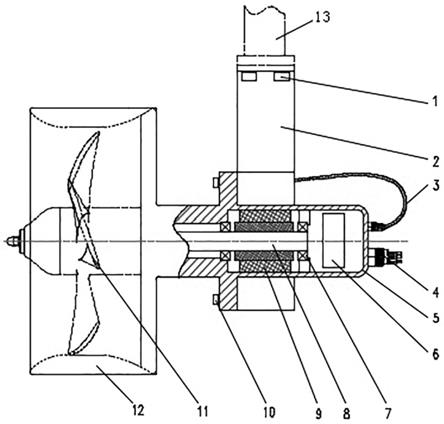
12.图1是力反馈型闭环控制水下推进器结构组成示意图。
13.图2为闭环控制原理图。
14.其中,1-推进器紧固件,2-推力传感器,3-推力传感器水密电缆组件,4-水密插座,5-壳体,6-控制器,7
‑
推力轴承组,8
‑
传动轴,9
‑
无刷直流电机,10
‑
推力传感器紧固件,11
‑
螺旋桨,12
‑
导流罩,13
‑
推进器固定座。
具体实施方式
15.下面结合附图和具体实施方式对本发明作进一步详细的说明。
16.应该指出,以下详细说明都是例式性的,旨在对本技术提供进一步的说明。除非另有指明,本文使用的所有技术和科学术语具有与本技术所属技术领域的普通技术人员通常理解的技术含义相同。
17.如图1所示,一种力反馈型闭环控制水下推进器,包括壳体,所述壳体内设有控制器、无刷直流电机,所述无刷直流电机的传动轴从壳体一端穿出以用于固定位于壳体外侧的螺旋桨,螺旋桨叶片外部安装有导流罩,所述无刷直流电机依靠3个呈120
°
环形布置且固定安装的霍尔位置传感器检测转子位置,通过触发信号检测与运算得到转速;所述壳体上固定一推力传感器,所述推力传感器和霍尔位置传感器均与控制器通信连接,控制器接收推力控制信号后,驱动无刷直流电机带动传动轴转动,进而带动螺旋桨转动,产生推力,推力传感器将采集到的推力数据反馈至控制器,形成外环力环;控制器接收推力控制信号后,驱动无刷直流电机带动传动轴转动,霍尔位置传感器将检测的电机实际转速反馈至控制器,形成中间环;控制器接收推力控制信号后,驱动无刷直流电机带动传动轴转动,将检测的电枢电流反馈至控制器,形成电流环。
18.壳体5整体采用钛合金或不锈钢等非磁性、耐腐蚀的材质,从而满足磁耦合传动和海洋环境要求。壳体是推进器的承压部件,内部加工有空腔和凸台结构,用于安装电机及驱动器等部件,壳体外部加工有推力传感器安装法兰,法兰上对称均匀开通孔。壳体尾部开设有两个螺孔,用于安装两个水密插座,一个用于推进器供电和控制信号传输,另一个用于接受反馈推力信号。
19.无刷直流电机9,安装于推进器中部,具有结构紧凑、寿命长、调速方便、易于控制等优点。采用霍尔位置传感器作为位置传感器,用于检测转子磁极位置、为逻辑开关电路提供正确换相信息并计算出电机实际转速。电机的定子与推进器壳体内壁贴合,电机转子与传动轴过盈配合,在安装电机转子的传动轴两侧位置各布置一组推力轴承,依靠推力轴承组保证转子高速转动时轴线居中,并承载螺旋桨正转或反转时产生的轴向力,保证转子和传动轴不会前后轴向窜动。传动轴依靠磁耦合方式带动螺旋桨转动,螺旋桨与导流罩组合使用,可有效提高水下推进效率。
20.推力传感器2上端与水下机器人上的推进器固定座13之间依靠推进器紧固件1连接,下端为中空式结构,便于从推进器套入,使用推力传感器紧固件将推进器壳体上的法兰与推力传感器连接为整体。推力传感器采用高精度力敏元件并水密封装,防护等级不低于ip68等级,可承受螺旋桨正反转时产生的拉/压力,量程与精度应与推进器性能参数相匹配,可获得最佳测量效果。使用时,推力传感器检测到压力信号,经过放大器转化为电压信号并经a/d转换为数字信号,通过推力传感器水密电缆组件传输至控制器。
21.以采用多推进器矢量布局的rov为例,rov运动控制根据作业指令以及当前状态解算出各自由度上所需的力/力矩,然后通过推力分配算法给出各推进器的设定推力。推力控制信号通过水密插座4传输给控制器6,控制器6执行控制策略,驱动无刷直流电机9带动传动轴8转动,进而带动螺旋桨11转动,水流流过螺旋桨11和导流罩12,产生初始推力。推力轴承组7对传动轴8限位,保证不会前后窜动。同时,推力传感器紧固件10、推进器紧固件1保证壳体5、推力传感器2与推进器固定座三者之间紧密贴合、无松动或变形,使得推力能够准确传递。推力传感器2受压或受拉后,迅速产生压力信号,经过放大器转化为电压信号并经a/d转换为数字信号,通过推力传感器水密电缆组件3传输至控制器6。控制器6采用三环控制,由外环力环、中间环速度环和内环电流环组成,在外环中,将反馈的实测推力值与设定值进行比较,差值经推力控制算法处理后,将运算结果作为转速给定,在中间环中,主要作用是稳定转速和抗负载扰动,霍尔位置传感器信号经过电路处理后得到反馈转速,将其与给定转速比较,差值经转速控制算法处理后,输出计算结果并作为电流给定;在电流环中,将给定电流与检测到的电枢电流进行比较,差值经电流控制算法处理后,输出并驱动无刷直流电机,带动螺旋桨转动,从而无论推进器周围流场环境如何变化,均能实现输出推力与设定推力的稳定控制,保证了水下机器人动力定位精度。上述推力控制算法、转速控制算法和电流控制算法均采用现有技术中的pid算法或滑模变结构等。
22.力反馈型闭环控制水下推进器具有推力输出精准、自适应抗干扰、对总体依赖性小、响应灵敏、工作可靠等优点,可应用于水下动平衡作业、水下矢量推进等场合,在各类uuv、rov、船舶、钻井平台等海工装备上适装性好,降低了与控制总体的集成与控制难度,应用前景广阔,具有较高的经济和社会效益。
23.上述虽然结合附图对本发明的具体实施方式进行了描述,但并非对本发明保护范围的限制,所属领域技术人员应该明白,在本发明的技术方案的基础上,本领域技术人员不需要付出创造性劳动即可做出的各种修改或变形仍在本发明的保护范围以内。