1.本实用新型涉及水下机械设备领域,具体是指一种水下观察机器人及水上自由吊放设备。
背景技术:
2.水下机器人由于其工作安全、适应能力强、作业范围广且具有经济和高效性,已成为水下作业的重要装备,其应用设计海洋环境调查、海底地质勘探、海洋结构物的安装与维修、水利水电工程、科学考察等诸多领域,经检索,中国专利cn107585273a公开了一种水下打捞机器人,其特征在于:复合光缆连接安装在水下机器人上的复合光缆线头及上位机,下位机设置在水下机器体内,所述水下机器人包括机械爪、机械臂、储物篮、履带底盘、上浮气囊及高压气瓶、紧急浮标、符合光缆线头、旋转平台和摄像头防水罩,所述机械臂连接旋转平台及机械爪,所述储物篮安装在履带底盘上前端,所述上浮气囊及高压气瓶安装在旋转平台底端,所述紧急浮标和复合光缆线头均安装在支撑旋平台的底座上,上述专利的不足:一是上述专利中水下机器人结构庞大,对于水下或海下某些区域无法进入;二是上述专利中水下机器人体积大、不够灵活、对于水下观察和勘测不够灵敏;三是对于海上搜救或者找寻工作来说,现有的水下机器人操作不便,而且使用成本高。
技术实现要素:
3.本实用新型的目的是为了解决现有技术不足,提供一种结构简单、体积小、灵活性高、观测侦察灵敏、抓取牢固、工作效率高、操作方便、使用成本低的水下观察机器人及水上自由吊放设备。
4.为实现上述目的,本实用新型所采用的技术方案是:
5.一种水下观察机器人,其特征在于:包括机架,所述机架上设有观察设备,所述观察设备和机架之间设有观察驱动机构,所述观察设备经观察驱动机构与机架连接,以利于通过观察设备探索观测和侦察水下情况。
6.本实用新型所述观察驱动机构包括支撑架、旋转电机和旋转轴,所述机架下方设有支撑架,所述机架上设有旋转电机,所述支撑架上设有旋转轴,所述旋转轴与支撑架固定连接,所述旋转轴由旋转电机驱动,所述旋转电机固定在机架上,所述观察设备固定在支撑架上,以利于通过旋转电机驱动旋转轴旋转,进而带动支撑架上观察设备旋转,实现多角度观测和侦察。
7.本实用新型所述支撑架上设有夹爪机构,以利于通过夹爪机构来夹持物体。
8.本实用新型所述夹爪机构包括夹爪电机、蜗杆、蜗轮、蜗轮轴和夹爪,所述支撑架两侧至少一侧设有连接架,所述连接架与支撑架固定连接,所述连接架上设有夹爪电机,所述夹爪电机与连接架固定连接,夹爪电机的输出轴上固定有蜗杆,夹爪电机的输出轴两侧对称设有夹爪,所述蜗杆两侧分别设有蜗轮,所述蜗轮与蜗杆上蜗齿啮合,所述蜗轮固定在蜗轮轴上,所述蜗轮轴经轴承固定在连接架上,蜗轮轴上固定设有夹爪,以利于通过夹爪电
机驱动蜗杆旋转,蜗杆通过与蜗轮啮合带动蜗轮旋转,实现两个夹爪的张开或闭合。
9.本实用新型所述机架上设有旋转角度监测机构,所述旋转角度监测机构包括连接齿轮、输出齿轮、监测齿轮和旋转角度传感器,所述旋转轴上固定设有连接齿轮,所述旋转轴经轴承与机架固定连接,所述连接齿轮一侧设有输出齿轮,另一侧设有监测齿轮,所述输出齿轮固定在旋转电机的输出轴上,输出齿轮与连接齿轮传动连接,所述监测齿轮固定在旋转角度传感器的输出轴上,所述监测齿轮与连接齿轮传动连接,所述旋转角度传感器固定在机架上,以利于通过旋转角度传感器来监测旋转轴的旋转角度,进而根据需求调整观察设备的角度。
10.本实用新型所述支撑架上设有观察俯仰机构,所述观察俯仰机构包括俯仰电机、驱动轴、从动轴和安装架,所述支撑架下端设有俯仰电机,所述俯仰电机与支撑架固定连接,所述俯仰电机下端设有安装架,所述俯仰电机一端设有驱动轴,另一端设有从动轴,所述驱动轴由俯仰电机驱动,所述驱动轴经轴承、轴承座与支撑架固定连接,所述从动轴经轴承、轴承座与支撑架固定连接,所述安装架两端与驱动轴和从动轴固定连接,所述观察设备设置在安装架上,以利于通过俯仰电机带动安装架上观察设备进行俯仰运动,进一步拓宽观察设备观察的角度。
11.本实用新型所述支撑架上设有俯仰角度监测机构,所述俯仰角度监测机构包括俯仰角度传感器和支架,所述从动轴内设有凹槽,所述俯仰角度传感器置于凹槽内,所述俯仰角度传感器的输出轴与从动轴固定连接,所述俯仰角度传感器经支架与支撑架固定连接,以利于通过俯仰角度传感器来监测俯仰电机的旋转角度。
12.本实用新型所述机架上设有线缆锁紧固定机构,以利于操作人员通过线缆锁紧固定机构连接机架,方便机架的吊放。
13.本实用新型所述线缆锁紧固定机构包括限位座、锁紧座、底座和连接缆,所述机架上端从下至上依次设有底座、锁紧座和限位座,所述锁紧座至少设有一个,所述底座下端与机架固定连接,底座上端与锁紧座固定连接,所述底座中间设有底座线缆穿孔,所述锁紧座中间设有第一锁紧穿孔,所述锁紧座上设有锁紧套,所述锁紧套下端与锁紧座固定连接,所述锁紧套中间设有第二锁紧穿孔,所述第二锁紧穿孔与第一锁紧穿孔相配合连通,所述锁紧套的外径从上至下逐渐增大,所述锁紧套外壁间隔设有挤压卡孔,所述锁紧座上设有与挤压卡孔相配合的挤压穿孔,所述锁紧套上设有限位座,所述限位座中间设有限位孔,限位孔的内径从上至下逐渐增大,所述限位孔上端的内径与锁紧套上端的外径相配合,所述限位孔下端的内径与锁紧套下端的外径相配合,所述机架外侧设有连接缆,所述连接缆包括线缆和承重层,所述线缆外壁至少设有一层承重层,所述承重层由承重丝编制而成,所述线缆上端与承重层固定连接并置于机架外侧,线缆下端依次穿过限位孔、第二锁紧穿孔、第一锁紧穿孔、底座线缆穿孔置于机架内与观察设备连接,所述线缆与底座密封固定连接,承重层上每个承重丝依次穿过限位孔、挤压卡孔、挤压穿孔置于挤压穿孔内或置于挤压穿孔下方,所述限位座套在锁紧套上,限位孔经锥度与锁紧套卡接,限位座与锁紧座固定连接,以利于底座将线缆密封固定,限位座、锁紧座经承重丝固定,使得机架内的线缆使用过程中不受拉扯,线缆不易损坏,使用寿命长。
14.本实用新型所述底座上设有线缆密封机构,所述线缆密封机构包括皮堵和螺母,所述底座中间设有连接套,底座两侧分别设有支撑块,连接套下端与底座固定连接,连接套
外壁设有螺纹,所述连接套中间设有线缆孔,线缆孔与底座线缆穿孔相配合连通,所述支撑块下端与底座固定连接,上端与锁紧座固定连接,两个支撑块相对扣合与锁紧座、底座之间形成连接腔,所述线缆穿过锁紧座置于连接腔的部分设有皮堵和螺母,所述皮堵下端径向向外设有凸台,所述螺母套在皮堵和连接套上,螺母上端内壁设有凹槽,所述凸台嵌入凹槽内,螺母与连接套螺纹连接,使得皮堵与线缆紧密相贴实现线缆的密封固定连接,以利于通过皮堵、螺母实现线缆的密封固定,同时防止机架内进水。
15.本实用新型所述连接套上端径向向外设有限位台,所述螺母内壁设有限位凹槽,所述螺母与连接套螺纹连接,限位台嵌入限位凹槽内,以利于通过限位台和限位凹槽限位螺母,提高螺母和连接套的连接稳定性。
16.本实用新型所述旋转轴呈空心状,所述旋转轴上设有滑环,所述滑环固定在旋转轴上,所述滑环一端的引线置于机架外侧,滑环另一端的引线穿过旋转轴与俯仰电机连接,以利于通过滑环来传输信号和供应电能。
17.本实用新型所述观察设备包括声呐、照明灯和摄像机,所述声呐、照明灯和摄像机分别固定在安装架上,以利于通过声呐、照明灯和摄像机对水下环境进行观测和侦察。
18.本实用新型所述机架上固定设有照明灯和摄像机,以利于操作人员及时了解机架所处的环境。
19.一种水上自由吊放设备,包括水上载体,所述水上载体上设有控制箱,所述控制箱内设有控制系统,其特征在于:所述水上载体上设有上述所述的水下观察机器人,所述水上载体上设有线缆收放机构,所述线缆收放机构固定在水上载体上,线缆收放机构与水下观察机器人连接,所述观察设备和观察驱动机构分别由控制系统控制,以利于通过水上载体载着水下观察机器人,移动到目标海域,然后通过线缆收放机构将水下观察机器人投送至水中进行水下探索观察。
20.本实用新型所述线缆收放机构包括卷线盘、卷线架和动力源,所述水上载体上设有卷线盘,所述卷线盘两侧设有卷线架,所述卷线盘固定在卷线轴上,所述卷线轴两端经轴承与卷线架固定连接,所述卷线轴一端穿出卷线架与动力源固定连接,所述卷线架与水上载体固定连接,所述连接缆上端绕过卷线盘与控制系统连接,以利于通过线缆收放机构来根据需求收放水下观察机器人。
21.本实用新型所述动力源为手摇把或卷线电机,所述卷线轴一端穿过卷线架与手摇把固定连接,或卷线轴一端穿过卷线架由卷线电机驱动,以利于通过人工或电机来驱动卷线盘,实现水下观察机器人的收放。
22.本实用新型所述卷线盘一侧设有收放架,所述收放架与卷线架或水上载体固定连接,所述收放架上间隔设有支杆,所述支杆两端与收放架固定连接,相邻两个支杆上分别安装有滑轮,两个滑轮之间形成限位线缆通道,所述连接缆上端穿过限位线缆通道、绕过卷线盘与控制系统连接,以利于通过收放架来支撑线缆,通过滑轮来限位线缆并使得线缆收放顺畅。
23.本实用新型所述水上载体为摩托艇或船,将水下观察机器人放在摩托艇或船上,通过摩托艇或船载着水下观察机器人到需要投放的目标海域。
24.本实用新型由于采用上述结构,具有结构简单、体积小、灵活性高、观测侦察灵敏、抓取牢固、工作效率高、操作方便、使用成本低等优点。
附图说明
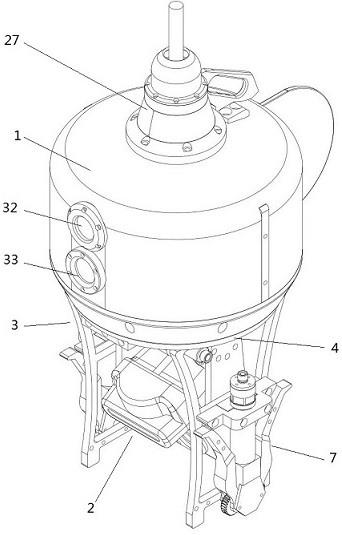
25.图1是本实用新型中水下观察机器人的结构示意图。
26.图2是本实用新型中水下观察机器人的主视图。
27.图3是本实用新型中水下观察机器人的侧视图。
28.图4是本实用新型中观察驱动机构的剖视图。
29.图5是本实用新型中观察俯仰机构的剖视图。
30.图6是本实用新型中夹爪机构的剖视图。
31.图7是本实用新型中线缆锁紧固定机构的爆炸图。
32.图8是本实用新型中线缆锁紧固定机构的剖视图。
33.图9是本实用新型中线缆密封机构的放大图。
34.图10是本实用新型中水上自由吊放设备的结构示意图。
35.图11是本实用新型中水下观察机器人被吊放的状态示意图。
36.附图标记:机架1,观察设备2,观察驱动机构3,支撑架4,旋转电机5,旋转轴6,夹爪机构7,夹爪电机8,蜗杆9,蜗轮10,夹爪11,连接架12,旋转角度监测机构13,连接齿轮14,输出齿轮15,监测齿轮16,旋转角度传感器17,观察俯仰机构18,俯仰电机19,驱动轴20,从动轴21,安装架22,俯仰角度监测机构23,俯仰角度传感器24,支架25,线缆锁紧固定机构27,滑环28,声呐29,照明灯30,摄像机31,机架照明灯32,机架摄像机33,水上载体34,控制箱35,水下观察机器人36,线缆收放机构37,卷线盘38,卷线架39,动力源40,手摇把41,收放架42,支杆43,滑轮44,限位座45,锁紧座46,底座47,线缆48,锁紧套49,挤压卡孔50,限位孔51,承重层52,承重丝53,线缆密封机构54,皮堵55,螺母56,连接套57,支撑块58,连接腔59,凸台60,凹槽61,限位台62,限位凹槽63。
具体实施方式
37.下面结合附图,对本实用新型的具体实施方式作进一步详细描述。
38.一种水下观察机器人,其特征在于:包括机架1,所述机架1上设有观察设备2,所述观察设备2和机架1之间设有观察驱动机构3,所述观察设备2经观察驱动机构3与机架1连接,以利于通过观察设备探索观测和侦察水下情况。
39.本实用新型所述观察驱动机构3包括支撑架4、旋转电机5和旋转轴6,所述机架1下方设有支撑架4,所述机架1上设有旋转电机5,所述支撑架4上设有旋转轴6,所述旋转轴6与支撑架4固定连接,所述旋转轴6由旋转电机5驱动,所述旋转电机5固定在机架1上,所述观察设备2固定在支撑架4上,以利于通过旋转电机驱动旋转轴旋转,进而带动支撑架上观察设备旋转,实现多角度观测和侦察。
40.本实用新型所述支撑架4上设有夹爪机构7,以利于通过夹爪机构来夹持物体。
41.本实用新型所述夹爪机构7包括夹爪电机8、蜗杆9、蜗轮10、蜗轮轴和夹爪11,所述支撑架4两侧至少一侧设有连接架12,所述连接架12与支撑架4固定连接,所述连接架12上设有夹爪电机8,所述夹爪电机8与连接架12固定连接,夹爪电机8的输出轴上固定有蜗杆9,夹爪电机8的输出轴两侧对称设有夹爪11,所述蜗杆9两侧分别设有蜗轮10,所述蜗轮10与蜗杆9上蜗齿啮合,所述蜗轮10固定在蜗轮轴上,所述蜗轮轴经轴承固定在连接架12上,蜗轮轴上固定设有夹爪11,以利于通过夹爪电机驱动蜗杆旋转,蜗杆通过与蜗轮啮合带动蜗
轮旋转,实现两个夹爪的张开或闭合。
42.本实用新型所述机架1上设有旋转角度监测机构13,所述旋转角度监测机构13包括连接齿轮14、输出齿轮15、监测齿轮16和旋转角度传感器17,所述旋转轴6上固定设有连接齿轮14,所述旋转轴6经轴承与机架1固定连接,所述连接齿轮14一侧设有输出齿轮15,另一侧设有监测齿轮16,所述输出齿轮15固定在旋转电机5的输出轴上,输出齿轮15与连接齿轮14传动连接,所述监测齿轮16固定在旋转角度传感器17的输出轴上,所述监测齿轮16与连接齿轮14传动连接,所述旋转角度传感器17固定在机架1上,以利于通过旋转角度传感器来监测旋转轴的旋转角度,进而根据需求调整观察设备的角度。
43.本实用新型所述支撑架4上设有观察俯仰机构18,所述观察俯仰机构18包括俯仰电机19、驱动轴20、从动轴21和安装架22,所述支撑架4下端设有俯仰电机19,所述俯仰电机19与支撑架4固定连接,所述俯仰电机19下端设有安装架22,所述俯仰电机19一端设有驱动轴20,另一端设有从动轴21,所述驱动轴20由俯仰电机19驱动,所述驱动轴20经轴承、轴承座与支撑架4固定连接,所述从动轴21经轴承、轴承座与支撑架4固定连接,所述安装架22两端与驱动轴20和从动轴21固定连接,所述观察设备2设置在安装架22上,以利于通过俯仰电机带动安装架上观察设备进行俯仰运动,进一步拓宽观察设备观察的角度。
44.本实用新型所述支撑架4上设有俯仰角度监测机构23,所述俯仰角度监测机构23包括俯仰角度传感器24和支架25,所述从动轴21内设有凹槽,所述俯仰角度传感器24置于凹槽内,所述俯仰角度传感器24的输出轴与从动轴21固定连接,所述俯仰角度传感器24经支架25与支撑架4固定连接,以利于通过俯仰角度传感器来监测俯仰电机的旋转角度。
45.本实用新型所述机架1上设有线缆锁紧固定机构27,以利于操作人员通过线缆锁紧固定机构连接机架,方便机架的吊放。
46.本实用新型所述线缆锁紧固定机构27包括限位座45、锁紧座46、底座47和连接缆,所述机架1上端从下至上依次设有底座47、锁紧座46和限位座45,所述锁紧座46至少设有一个,所述底座47下端与机架1固定连接,底座47上端与锁紧座46固定连接,所述底座47中间设有底座线缆穿孔,所述锁紧座46中间设有第一锁紧穿孔,所述锁紧座46上设有锁紧套49,所述锁紧套49下端与锁紧座46固定连接,所述锁紧套49中间设有第二锁紧穿孔,所述第二锁紧穿孔与第一锁紧穿孔相配合连通,所述锁紧套49的外径从上至下逐渐增大,所述锁紧套49外壁间隔设有挤压卡孔50,所述锁紧座46上设有与挤压卡孔50相配合的挤压穿孔,所述锁紧套49上设有限位座45,所述限位座45中间设有限位孔51,限位孔51的内径从上至下逐渐增大,所述限位孔51上端的内径与锁紧套49上端的外径相配合,所述限位孔51下端的内径与锁紧套49下端的外径相配合,所述机架1外侧设有连接缆,所述连接缆包括线缆48和承重层,所述线缆48外壁至少设有一层承重层52,所述承重层52由承重丝53编制而成,所述线缆48上端与承重层52固定连接并置于机架1外侧,线缆48下端依次穿过限位孔51、第二锁紧穿孔、第一锁紧穿孔、底座线缆穿孔置于机架1内与观察设备2连接,所述线缆48与底座47密封固定连接,承重层52上每个承重丝53依次穿过限位孔51、挤压卡孔50、挤压穿孔置于挤压穿孔内或置于挤压穿孔下方,所述限位座45套在锁紧套49上,限位孔51经锥度与锁紧套49卡接,限位座45与锁紧座46固定连接,以利于底座将线缆密封固定,限位座、锁紧座经承重丝固定,使得机架内的线缆使用过程中不受拉扯,线缆不易损坏,使用寿命长。
47.本实用新型所述底座47上设有线缆密封机构54,所述线缆密封机构54包括皮堵55
和螺母56,所述底座47中间设有连接套57,底座47两侧分别设有支撑块58,连接套57下端与底座47固定连接,连接套57外壁设有螺纹,所述连接套57中间设有线缆孔,线缆孔与底座线缆穿孔相配合连通,所述支撑块58下端与底座47固定连接,上端与锁紧座46固定连接,两个支撑块58相对扣合与锁紧座46、底座47之间形成连接腔59,所述线缆48穿过锁紧座46置于连接腔59的部分设有皮堵55和螺母56,所述皮堵55下端径向向外设有凸台60,所述螺母56套在皮堵55和连接套57上,螺母56上端内壁设有凹槽61,所述凸台60嵌入凹槽61内,螺母56与连接套57螺纹连接,使得皮堵55与线缆48紧密相贴实现线缆48的密封固定连接,以利于通过皮堵、螺母实现线缆的密封固定,同时防止机架内进水。
48.本实用新型所述连接套57上端径向向外设有限位台62,所述螺母56内壁设有限位凹槽63,所述螺母56与连接套57螺纹连接,限位台62嵌入限位凹槽63内,以利于通过限位台和限位凹槽限位螺母,提高螺母和连接套的连接稳定性。
49.本实用新型所述旋转轴6呈空心状,所述旋转轴6上设有滑环28,所述滑环28固定在旋转轴6上,所述滑环28一端的引线置于机架1外侧,滑环28另一端的引线穿过旋转轴6与俯仰电机19连接,以利于通过滑环来传输信号和供应电能。
50.本实用新型所述观察设备2包括声呐29、照明灯30和摄像机31,所述声呐29、照明灯30和摄像机31分别固定在安装架22上,以利于通过声呐、照明灯和摄像机对水下环境进行观测和侦察。
51.本实用新型所述机架1上固定设有机架照明灯32和机架摄像机33,以利于操作人员及时了解机架所处的环境。
52.一种水上自由吊放设备,包括水上载体34,所述水上载体34上设有控制箱35,所述控制箱35内设有控制系统,其特征在于:所述水上载体34上设有上述所述的水下观察机器人36,所述水上载体34上设有线缆收放机构37,所述线缆收放机构37固定在水上载体34上,线缆收放机构37与水下观察机器人36连接,所述观察设备2和观察驱动机构3分别由控制系统控制,以利于通过水上载体载着水下观察机器人,移动到目标海域,然后通过线缆收放机构将水下观察机器人投送至水中进行水下探索观察。
53.本实用新型所述线缆收放机构37包括卷线盘38、卷线架39和动力源40,所述水上载体34上设有卷线盘38,所述卷线盘38两侧设有卷线架39,所述卷线盘38固定在卷线轴上,所述卷线轴两端经轴承与卷线架39固定连接,所述卷线轴一端穿出卷线架39与动力源40固定连接,所述卷线架39与水上载体34固定连接,所述连接缆上端绕过卷线盘38与控制系统连接,以利于通过线缆收放机构来根据需求收放水下观察机器人。
54.本实用新型所述动力源40为手摇把41或卷线电机,所述卷线轴一端穿过卷线架39与手摇把41固定连接,或卷线轴一端穿过卷线架39由卷线电机驱动,以利于通过人工或电机来驱动卷线盘,实现水下观察机器人的收放。
55.本实用新型所述卷线盘38一侧设有收放架42,所述收放架42与卷线架39或水上载体34固定连接,所述收放架42上间隔设有支杆43,所述支杆43两端与收放架42固定连接,相邻两个支杆43上分别安装有滑轮44,两个滑轮44之间形成限位线缆通道,所述连接缆上端穿过限位线缆通道、绕过卷线盘38与控制系统连接,以利于通过收放架来支撑线缆,通过滑轮来限位线缆并使得线缆收放顺畅。
56.本实用新型所述水上载体34为摩托艇或船,将水下观察机器人放在摩托艇或船
上,通过摩托艇或船载着水下观察机器人到需要投放的目标海域。
57.如附图1
‑
附图9为本实用新型中水下观察机器人的结构示意图,使用前,如附图10和附图11,将本实用新型通过连接缆安装在摩托艇或者船上,本实用新型中连接缆包括线缆和承重层,线缆外侧至少设有一层承重层,如附图7
‑
附图9,线缆外侧设有两层承重层,线缆外侧设有第一层承重层,第一层承重层外侧设有第二层承重层,承重层均由承重丝编织组成,相应的锁紧座设有两个,两个锁紧座的结构类似,分别用来固定第一层承重层的承重丝和第二层承重层的承重丝,承重丝可采用钢丝,两个锁紧座经锥度卡接再经螺栓与限位座固定连接,即可将第一层承重层的承重丝和第二层承重层的承重丝固定,线缆与底座密封固定,使得机架内的线缆使用过程中不受拉扯,线缆不易损坏,水下观察机器人的机架上可安装提手和导向鳍,提手方便取放水下观察机器人,导向鳍用来导向水下观察机器人的方向,水下观察机器人上旋转电机、夹爪电机、旋转角度传感器、俯仰角度传感器、俯仰电机、滑环、声呐、照明灯、摄像机、机架照明灯、机架摄像机均通过线缆与控制系统连接,由控制系统控制,控制系统可采用plc控制系统,夹爪可分为夹爪前部和夹爪后部,夹爪前部和夹爪后部螺纹连接,如此可根据夹持物体的需求更换夹爪后部,本实用新型中支撑架可相对机架360
°
旋转,连接齿轮和输出齿轮可啮合传动或链条链接传动,连接齿轮和监测齿轮可啮合传动或链条链接传动,安装架可相对支撑架前后摆动,提高了水下观察机器人的灵活性,大大增加了观察设备侦察和扫描的角度范围,使用时,将水下观察机器人放在摩托艇或船上,移动到目标海域,然后通过手摇把转动卷线盘将水下观察机器人投入海中,操作人员通过控制系统控制水下观察机器人在水下的行动,水下观察机器人可对水下进行摄像观察和声呐侦测,可以快速方便有效的完成搜救和侦察任务,水下观察机器人还可以通过夹爪抓取水下物体,操作十分方便,而且水下观察机器人结构小巧,使用成本低,转动灵活,对于狭小或者比较深的海域都可方便进入。
58.本实用新型由于采用上述结构,具有结构简单、体积小、灵活性高、观测侦察灵敏、抓取牢固、工作效率高、操作方便、使用成本低等优点。