1.本实用新型属于水下抓取装置技术领域,具体涉及一种智能水下抓取装置。
背景技术:
2.目前,沿海地区仍然有部分海产需要通过人工潜入水中进行捕捞。但是,通过人工潜入水中捕捞或抓取具有一定的危险性,并且,通过人工水下抓取可探索深度小、探索时间短,对潜水人员的技能水平依赖性高。因此,需要一种智能水下抓取装置,可替代人工进行水下物体抓取。
技术实现要素:
3.本实用新型的目的是提供一种智能水下抓取装置,以替代人工进行水下物体抓取。
4.为了解决上述技术问题,本实用新型提供了一种智能水下抓取装置,包括:船体;绞盘,安装在船体的中部;抓取线缆,绕卷在绞盘上;以及抓取组件,与抓取线缆固定连接。
5.进一步的,所述抓取组件包括与抓取线缆固定连接的机械手和安装在机械手上的摄像头。
6.进一步的,所述抓取线缆包括保护层,以及包裹在保护层内的摄像头供电线束、视频信号线束、灯控线束和机械手供电线束。
7.进一步的,所述船体包括两个并排设置的片体,以及架设在两个片体上的平台板;所述绞盘安装在船体的中部。
8.进一步的,所述平台板的前端面和后端面均设置有安装板;所述片体的上表面设置有连接板;所述安装板的两端延伸出平台板的侧面与片体的连接板固定连接。
9.进一步的,所述船体上设置有过水涵道;所述过水涵道内设置有推进器。
10.进一步的,所述智能水下抓取装置包括控制模块,以及与控制模块电性相连的通信模块;所述绞盘、摄像头、推进器均与控制模块电性相连;其中所述摄像头适于采集水下图像信息;所述通信模块用于传输摄像头采集的图像信息;以及所述控制模块适于根据通信模块接收的控制信号控制绞盘收放、机械手抓取或松开,以及控制推进器驱动船体移动。
11.本实用新型的有益效果是,本实用新型的智能水下抓取装置在船体上设置有绞盘,绞盘可以通过抓取线缆对抓取组件进行收放,无需通过潜水人员潜水,船体可以航行到指定地点作业,可以扩大作业范围和作业时长,提升了抓取效率。
12.本实用新型的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本实用新型而了解。
13.为使本实用新型的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
附图说明
14.为了更清楚地说明本实用新型具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
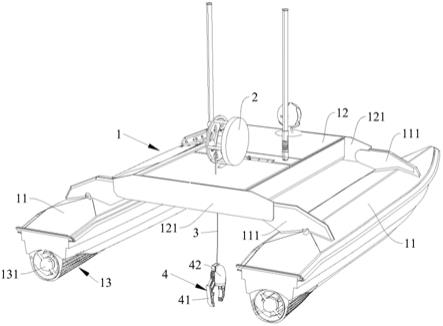
15.图1是本实用新型的智能水下抓取装置的立体图;
16.图2是本实用新型的智能水下抓取装置的抓取线缆的剖视图;
17.图3是本实用新型的智能水下抓取装置的结构框图。
18.图中:
19.船体1、片体11、连接板111、平台板12、安装板121、过水涵道13、推进器131、绞盘2、抓取线缆3、保护层31、摄像头供电线束32、视频信号线束33、灯控线束34、机械手供电线束35、抓取组件4、机械手41、摄像头42。
具体实施方式
20.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.实施例
22.如图1所示,本实施例提供了一种智能水下抓取装置,包括:船体1;绞盘2,安装在船体1的中部;抓取线缆3,绕卷在绞盘2上;以及抓取组件4,与抓取线缆3固定连接。
23.在本实施例中,智能水下抓取装置在船体1上设置有绞盘2,绞盘2可以通过抓取线缆3对抓取组件4进行收放,无需通过潜水人员潜水,船体1可以航行到指定地点作业,可以扩大作业范围和作业时长,提升了抓取效率。
24.在本实施例中,绞盘2安装在船体1的中部可以保持船体1平衡。
25.在本实施例中,优选的,所述抓取组件4包括与抓取线缆3固定连接的机械手41和安装在机械手41上的摄像头42;摄像头42可以实时监控水下画面,更能提高抓取效率,增强体验感;摄像头42安装在机械手41上,可以更好地监控机械手41附近的水下情况,可以更加精准的监控抓取情况。
26.如图2所示,在本实施例中,优选的,所述抓取线缆3包括保护层31,以及包裹在保护层31内的摄像头供电线束32、视频信号线束33、灯控线束34和机械手供电线束35。
27.在本实施例中,将摄像头供电线束32、视频信号线束33、灯控线束34和机械手供电线束35集成在抓取线缆3内,可以简化智能水下抓取装置的整个体结构;可以便于元器件的装配连接;可以减少线束的外露,防止与水下物体或船体1缠扰。
28.在本实施例中,所述船体1包括两个并排设置的片体11,以及架设在两个片体11上的平台板12;所述绞盘2安装在船体1的中部。
29.在本实施方式中,将平台板12架设在两个片体11上为大稳性设计,为水下抓取作业提供了稳定可靠的作业平台。
30.在本实施方式中,优选的,所述平台板12的前端面和后端面均设置有安装板121;
所述片体11的上表面设置有连接板111;所述安装板121的两端延伸出平台板12的侧面与片体11的连接板111固定连接。
31.在本实施例中,平台板12通过安装板121和连接板111的配合架设在片体11的上表面,可以抬高平台板12,充分利用片体11的浮力;安装板121与连接板111可通过固定件可拆卸连接,便于拆装和运输。
32.在本实施例中,优选的,所述船体1上设置有过水涵道13;所述过水涵道13内设置有推进器131。
33.在本实施方式中,将推进器131设置在过水涵道13内,可以防止在拖曳过程中抓取线缆3与螺旋桨发生缠扰。
34.在本实施例中,可选的,所述智能水下抓取装置包括控制模块,以及与控制模块电性相连的通信模块;所述绞盘2、摄像头42、推进器131均与控制模块电性相连;其中所述摄像头42适于采集水下图像信息;所述通信模块用于传输摄像头42采集的图像信息;以及所述控制模块适于根据通信模块接收的控制信号控制绞盘2收放、机械手41抓取或松开,以及控制推进器131驱动船体1移动。
35.在本实施方式中,所述控制模块可以但不限于stm32系列,所述通信模块可以点不限于是4g通信模块;本实施例未对软件程序进行改进,本领域技术完全可以通过采用现有技术实现上述功能。
36.综上所述,本智能水下抓取装置在船体1上设置有绞盘2,绞盘2可以通过抓取线缆3对抓取组件4进行收放,无需通过潜水人员潜水,船体1可以航行到指定地点作业,可以扩大作业范围和作业时长,提升了抓取效率;抓取组件4包括与抓取线缆3固定连接的机械手41和安装在机械手41上的摄像头42;摄像头42可以实时监控水下画面,更能提高抓取效率,增强体验感;摄像头42安装在机械手41上,可以更好地监控机械手41附近的水下情况,可以更加精准的监控抓取情况;将摄像头供电线束32、视频信号线束33、灯控线束34和机械手供电线束35集成在抓取线缆3内,可以简化智能水下抓取装置的整个体结构;可以便于元器件的装配连接;可以减少线束的外露,防止与水下物体或船体1缠扰;平台板12通过安装板121和连接板111的配合架设在片体11的上表面,可以抬高平台板12,充分利用片体11的浮力;船体1可以航行到任意地点进行水下探索,且船体1移动、抓取线缆3收放均通过遥控器控制;线缆上的摄像头42可以实时监控水下画面,更能提高抓取效率,增强体验感;无惧风吹日晒,船体1可以全天候水下探索抓取物体。
37.本技术中选用的各个器件(未说明具体结构的部件)均为通用标准件或本领域技术人员知晓的部件,其结构和原理都为本技术人员均可通过技术手册得知或通过常规实验方法获知。
38.在本实用新型实施例的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
39.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是
为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
40.以上述依据本实用新型的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项实用新型技术思想的范围内,进行多样的变更以及修改。本项实用新型的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。