1.本实用新型涉及水上救援技术领域,具体为一种水上救援机器人。
背景技术:
2.溺水是人淹没于水或其他液体介质中并受到伤害的状况。水充满呼吸道和肺泡引起缺氧窒息,吸收到血液循环的水引起血液渗透压改变、电解质紊乱和组织损害;最后造成呼吸停止和心脏停搏而死亡。
3.显示生活中人们需要对溺水者进行水上救援,即对溺者与非溺者所采取救护措施,在室外水域的溺水者进行救援时,会采用水上救援机器人。
4.但是,现有的水上救援机器人大都是在落水者被发现后,通过人为远程操控机器人到达落水者身边,从落水者被发现到救援耗费了很长的时间,有一部分自动巡航的水上机器人,是通过探测大幅度动态险情才锁定落水者,但大幅度动态影像并不全是有人落水,因此精度不高,且没有考虑湖面障碍等影响因素,同时救生装置采用弹射装置发射,落点不确定,并不可靠,无法满足自动快速救援。
5.为此,本实用新型研发了一种水上救援机器人。
技术实现要素:
6.针对现有技术中效率低、识别精度差,且没有考虑湖面障碍等影响因素,同时救生装置采用弹射装置发射,落点不确定,并不可靠,无法满足自动快速救援的不足,本实用新型提供了一种水上救援机器人,可实现对落水者的快速准确检测并获取位置,进行最快路径规划并对沿途障碍物进行识别,快速到达落水者身边,机械结构转动,救生圈落下,实现救援,本机器人还拥有远程控制模式和自动报警功能,提高救援成功率,机器人的动力由太阳能供电系统提供,做到绿色环保,解决了上述背景技术中提出的问题。
7.为实现上述目的,本实用新型通过以下技术方案予以实现:一种水上救援机器人,包括机器本体、供电系统和核心控制器,所述核心控制器分别与传感器系统和执行系统电性连接,所述传感器系统包括视觉模块和导航定位模块,所述执行系统包括电机驱动装置和救生圈锁扣盘。
8.可选的,所述传感器系统还包括避障模块。
9.可选的,所述执行系统还包括报警系统。
10.可选的,所述供电系统包括两个蓄电池以及太阳能电池板。
11.可选的,所述导航定位模块、核心控制器、电机驱动装置、报警系统以及视觉模块均设置于机器本体内部主控器集成盒内。
12.可选的,所述机器本体的底部的两侧均设置有浮力装置。
13.可选的,所述电机驱动装置包括直流电机和盘式电机,所述直流电机的输出端通过联轴器与水轮连接,所述盘式电机的输出端与救生圈卡扣盘连接,所述救生圈卡扣盘的内部设置有救生圈。
14.可选的,所述机器本体的外表面设置有pvc外壳。
15.可选的,所述盘式电机的下方设置有中间座。
16.可选的,所述救生圈卡扣盘的一侧设置有固定柱。
17.本实用新型提供了一种水上救援机器人,具备以下有益效果:
18.1、该水上救援机器人,当视觉模块检测到人员落水后,机器人报警模块发出警报,并拨打报警电话,再结合双目立体视觉获取并反馈落水人员与障碍物的位置信息,使用人工势场算法进行路径规划,主控器控制动力系统工作驱动机器人前进,进行救援工作,进而具有自动巡航,可及时发现落水者,检测速度快的优势,同时通过对落水人员和障碍物的位置信息分析,自动避障采取最优路径,效率高,并且采用太阳能和蓄电池的混合动力,节能环保。
19.2、该水上救援机器人,通过电机驱动装置和救生圈卡扣盘的设置,当到达落水人员附近,电机驱动装置对盘式电机进行驱动,带动救生圈卡扣盘旋转,救生圈依靠自重落下,进而方便对落水者施放救生圈,避免其施放不及时而造成意外发生。
附图说明
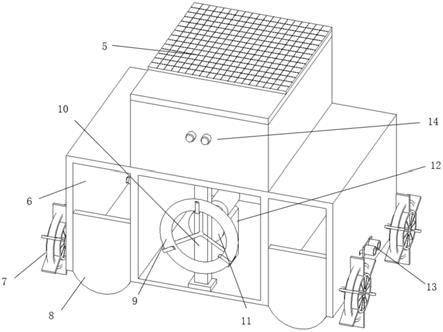
20.图1为本实用新型立体结构示意图;
21.图2为本实用新型系统流程框架示意图;
22.图3为本实用新型仰视结构示意图;
23.图4为本实用新型救生圈卡扣盘立体结构示意图;
24.图5为本实用新型救生圈卡扣盘模型示意图;
25.图6为本实用新型救生圈下落示意图。
26.图中:1、导航定位模块;2、核心控制器;3、电机驱动装置;4、报警系统;5、太阳能电池板;6、pvc外壳;7、水轮;8、浮力装置;9、救生圈; 10、固定柱;11、盘式电机;12、中间座;13、避障模块;14、视觉模块; 15、蓄电池;16、联轴器;17、直流电机;18、主控器集成盒;19、救生圈卡扣盘。
具体实施方式
27.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
28.请参阅图1至图6,本实用新型提供一种技术方案:一种水上救援机器人,包括机器本体、供电系统和核心控制器2,所述核心控制器2分别与传感器系统和执行系统电性连接,所述传感器系统包括视觉模块14和导航定位模块1,所述执行系统包括电机驱动装置3和救生圈锁扣盘19,传感器系统负责对落水人员进行检测、对位置和障碍物进行定位;
29.执行系统负责机器人的移动和救援;
30.核心控制器2可与远程控制模块连接,工作人员可通过wifi模块与手机 app对其远程操控。
31.本实用新型中,所述传感器系统还包括避障模块13。
32.本实用新型中,所述执行系统还包括报警系统4。
33.本实用新型中,所述供电系统包括两个蓄电池15以及太阳能电池板5,蓄电池15的电压为24v,用以给传感器系统、执行系统中的各个装置与核心控制器2供电,供电模块设置于机器本体的顶部。
34.本实用新型中,所述导航定位模块1、核心控制器2、电机驱动装置3、报警系统4以及视觉模块14均设置于机器本体内部主控器集成盒18内。
35.本实用新型中,所述机器本体的底部的两侧均设置有浮力装置8,浮力装置8使机器本体浮于水面。
36.本实用新型中,所述电机驱动装置3包括直流电机17和盘式电机11,所述直流电机17的输出端通过联轴器16与水轮7连接,所述盘式电机11的输出端与救生圈卡扣盘19连接,所述救生圈卡扣盘19的内部设置有救生圈9,直流电机17带动联轴器16转动,带动水轮7运动;
37.电机驱动装置3对盘式电机11进行驱动,带动救生圈卡扣盘19旋转 180
°
,救生圈9依靠自重落下,实现救援。
38.本实用新型中,所述机器本体的外表面设置有pvc外壳6,具有良好的隔水功能。
39.本实用新型中,所述盘式电机11的下方设置有中间座12,中间座12对盘式电机11进行支撑。
40.本实用新型中,所述救生圈卡扣盘19的一侧设置有固定柱10,固定柱 10对救生圈卡扣盘19进行支撑。
41.导航定位模块1选用支持北斗gps的双模模块atgm336h;
42.核心控制器2选用树莓派4b,cpu1.5ghz四核64位;
43.电机驱动装置3选用ir2101驱动电路和双h桥l298n逻辑电路板;
44.报警系统4选用自带sim卡的云报警器模块;
45.避障模块选用us
‑
100超声波测距模块;
46.视觉模块选用基于ov5647感光芯片的树莓派摄像头。
47.综上所述,该水上救援机器人,工作原理如下:
48.视觉模块14对水面进行监控,当检测到落水人员的时候,树莓派4b核心控制器2控制机器人朝落水人员方向前进同时控制报警系统4工作,通过导航定位模块1和避障模块13对水面的障碍物进行检测,规划出躲避障碍物的最佳路径,核心控制器2对电机驱动装置3进行控制,电机驱动装置3对直流电机17进行驱动,带动联轴器16带动机器人的四个水轮7工作,完成机器人的前进,当机器人靠近落水者时,电机驱动装置3对盘式电机11进行驱动,带动救生圈卡扣盘19旋转180
°
,救生圈9依靠自重落下,实现救援。
49.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。